YOLOV5从训练到部署测试NCNN安卓端部署保姆级教程
一、基础配置
- 为防止环境差异,造成教程中部分步骤出现差异,造成部署失败,下面将组件版本列举出来。
| 组件 |
版本 |
| anaconda |
4.8.3 |
| python |
3.8.13 |
| yolov5 |
6.0 |
| System |
Ubuntu 22.04.1 x86_64 |
| System Core |
5.10.102.1 |
| gcc |
11.2.0 |
| g++ |
11.2.0 |
其中System、System Core、gcc、g++版本也许其他低版本也可以,但需自测。建议在docker中进行环境搭建。
- 初始化系统配置
sudo apt update
sudo apt install git gcc g++ vim curl wget cmake -y
1、Anaconda
- 下载Anaconda(如果使用Miniconda也可以从此处下载)
- 安装完毕后初始化配置conda
conda config --set show_channel_urls yes #在用户目录下生成.condarc文件- 为了加快下载速度,我们可以配置大陆境内conda加速镜像。打开用户目录下的.condarc文件,编辑内部信息
channels:
- defaults
show_channel_urls: true
default_channels:
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/r
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/msys2
custom_channels:
conda-forge: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
msys2: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
bioconda: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
menpo: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
pytorch: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
pytorch-lts: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
simpleitk: https://mirrors.tuna.tsinghua.edu.cn/anaconda/clou- 创建YOLO基础环境
conda create -n yolo python=3.8 # 创建一个名为yolo的python3.8环境2、YoloV5
git clone https://github.com/ultralytics/yolov5.git # 下载yolov5源码
cd yolov5
git checkout v6.0 -b v6.0 # 切换为6.0版本
git checkout
conda activate yolo # 切换到前面创建的conda环境- 打开requirements.txt文件,修改其中内容
# pip install -r requirements.txt
# Base ----------------------------------------
matplotlib>=3.2.2
numpy>=1.18.5
opencv-python>=4.1.2
Pillow>=7.1.2
PyYAML>=5.3.1
requests>=2.23.0
scipy>=1.4.1
torch==1.7.1
torchvision==0.8.1
tqdm>=4.41.0
# Logging -------------------------------------
tensorboard==2.4.1
# wandb
# Plotting ------------------------------------
pandas>=1.1.4
seaborn>=0.11.0
# Export --------------------------------------
# coremltools>=4.1 # CoreML export
# onnx>=1.9.0 # ONNX export
# onnx-simplifier>=0.3.6 # ONNX simplifier
# scikit-learn==0.19.2 # CoreML quantization
# tensorflow>=2.4.1 # TFLite export
# tensorflowjs>=3.9.0 # TF.js export
# Extras --------------------------------------
# albumentations>=1.0.3
# Cython # for pycocotools https://github.com/cocodataset/cocoapi/issues/172
# pycocotools>=2.0 # COCO mAP
# roboflow
thop # FLOPs computation- 安装Yolo基础环境
pip install -r requirements.txt -i https://mirrors.aliyun.com/pypi/simple/
conda install onnx
pip install onnxsim
pip install onnx-simplifier
pip install onnxruntime二、训练样本
- 准备labelimg环境
conda create -n labelimg python=3.8
conda activate labelimg
conda install labelimg
labelimg此时,系统会打开labelimg工具
- 创建样本
- 我们在系统系统目录下创建metadata目录,在目录下分别创建images、labels文件夹。
- 将包含需要识别目标的图片全部放入到images文件夹下。
- 打开labelimg,点击打开文件夹(打开目录),选择images所在文件夹。
- 点击改变存放目录,选择labels所在文件夹
- 点击标记模式为yolo模式,如下图所示。
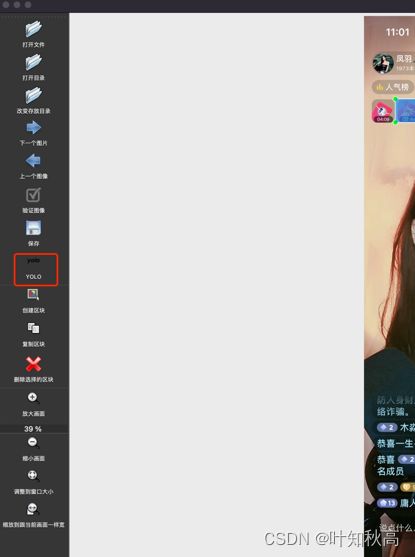
点击查看 -> 自动保存模式,即打开自动保存模式。
- 开始标注
labelimg快捷键:W,开启标注框。A,上一张。D,下一张。将全部图片标注完毕。(准备的单个图片不需要包含所有需要识别的类别)
- 创建配置 xxx.yml
# 训练集,yolo会读取此文件夹下所有图片进行训练,有条件建议切分样本或者分批标注训练集、测试集、验证集。此处路径使用了相对路径,因此yolo会以 train.py 所在目录为根目录进行样本的搜索
train: ./metadata/images
# 验证集
val: ./metadata/images
# 验证集
test: ./metadata/images
# 类别个数,标注的时候共涉及到了几个类别,就填几,跟下面names下的个数相等
nc: 3
# 类别列表, 枚举所有类别, 可以直接复制 labels/classes.txt 下的所有类别,粘贴到此处,记得带引号,与classes.txt 顺序不要错
names: ["a", "b", "c"]此处我们将训练集、验证集、测试集放到了相同位置,可能造成结果与样本拟合,我们也可以将训练集、测试集、验证集按照下面的目录结构放置样本及配置
── images // 存放所有图像数据
├── test // 测试集图片存放位置
│ ├── xxx.jpg
├── train // 训练集图片存放位置
│ ├── xxx.jpg
└── val // 验证集图片存放位置
├── xxx.jpg
── labels // 所有标注完毕后的数据
├── test // 测试集标注标签文件所在位置
│ ├── xxx.txt
├── train// 训练集标注标签文件所在位置
│ ├── xxx.txt
└── val// 验证集标注标签文件所在位置
├── xxx.txt注意:images下样本集各自文件夹下的样本名称必须与labels下各自文件夹下的样本配置名称相同。
此处提供一个可以自动切分样本的py脚本
import os
import random
import argparse
import shutil
# 默认会从指定的目录的上级目录下的labels下查找。例如sourcepath指定为 ./dataset/images 则会认为 ./dataset/labels中存放的是所有标注完毕后的标签
LABELS_PATH = "./labels"
CLASSES_PROPERTIES = LABELS_PATH + "/classes.txt"
parser = argparse.ArgumentParser()
# 未切分的数据集地址
parser.add_argument('--source_path', type=str, help='input images path')
# 数据集划分完毕后存放的位置,不存在会自己创建
parser.add_argument('--save_path', default='./save_path', type=str, help='new train dataset path')
# parser.add_argument("--val_path", default="./val", type=str, help="new verify dataset path")
# parser.add_argument("--test_path", default="./test", type=str, help="new verify dataset path")
# 分割比例
parser.add_argument("--dataset_split_rate", default="7:2:1", type=str, help="dataset split rate, default: 7:2:1 as train:val:test")
opt = parser.parse_args()
source_path = opt.source_path
train_path = os.path.join(opt.save_path, "./images/train")
val_path = os.path.join(opt.save_path, "./images/val")
test_path = os.path.join(opt.save_path, "./images/test")
dataset_split_rate = opt.dataset_split_rate
train_dataset_rate = 0
val_dataset_rate = 0
test_dataset_rate = 0
if not os.path.exists(source_path):
raise Exception(source_path + " not found exists")
if not os.path.exists(train_path):
os.makedirs(train_path)
if not os.path.exists(val_path):
os.makedirs(val_path)
if not os.path.exists(test_path):
os.makedirs(test_path)
dataset_split_rate = dataset_split_rate.split(":")
if len(dataset_split_rate) != 3:
raise Exception("dataset_split_rate must be third numbers exp: 7:2:1")
train_dataset_rate = dataset_split_rate[0]
val_dataset_rate = dataset_split_rate[1]
test_dataset_rate = dataset_split_rate[2]
if not train_dataset_rate.isdigit():
raise Exception("dataset_split_rate must be third numbers exp: 7:2:1")
if not val_dataset_rate.isdigit():
raise Exception("dataset_split_rate must be third numbers exp: 7:2:1")
if not test_dataset_rate.isdigit():
raise Exception("dataset_split_rate must be third numbers exp: 7:2:1")
train_dataset_rate = int(train_dataset_rate)
val_dataset_rate = int(val_dataset_rate)
test_dataset_rate = int(test_dataset_rate)
if train_dataset_rate + val_dataset_rate + test_dataset_rate != 10:
raise Exception("dataset sum rate must be 10, current val : " + str(train_dataset_rate + val_dataset_rate + test_dataset_rate))
train_dataset_rate = train_dataset_rate * 0.1
val_dataset_rate = val_dataset_rate * 0.1
test_dataset_rate = test_dataset_rate * 0.1
# 读取源数据路径
all_dataset = {}
for image in os.listdir(source_path):
image_path = os.path.abspath(os.path.join(source_path, image))
fname = os.path.splitext(image)[-2]
label_path = os.path.abspath(os.path.join(source_path, "../" + LABELS_PATH + "/" + fname + '.txt'))
all_dataset[image_path] = label_path
if len(all_dataset) < 3:
raise Exception("dataset images number must > 3...")
image_orders = list(all_dataset.keys())
random.shuffle(image_orders)
train_dataset = {}
val_dataset = {}
test_dataset = {}
# 分割样本
train_dataset_max_index = int(train_dataset_rate * len(image_orders))
val_dataset_max_index = int(val_dataset_rate * len(image_orders))
test_dataset_max_index = int(test_dataset_rate * len(image_orders))
for k in image_orders:
if len(train_dataset) >= train_dataset_max_index:
if len(val_dataset) >= val_dataset_max_index:
test_dataset[k] = all_dataset[k]
else:
val_dataset[k] = all_dataset[k]
else:
train_dataset[k] = all_dataset[k]
# 保存训练集
for f in train_dataset.keys():
f = str(f)
shutil.copy(f, train_path)
clas_path = os.path.abspath(os.path.join(train_path, "../../" + LABELS_PATH + "/train"))
if not os.path.exists(clas_path):
os.makedirs(clas_path)
shutil.copy(train_dataset[f], clas_path)
for f in val_dataset.keys():
f = str(f)
shutil.copy(f, val_path)
clas_path = os.path.abspath(os.path.join(train_path, "../../" + LABELS_PATH + "/val"))
if not os.path.exists(clas_path):
os.makedirs(clas_path)
shutil.copy(val_dataset[f], clas_path)
for f in test_dataset.keys():
f = str(f)
shutil.copy(f, test_path)
clas_path = os.path.abspath(os.path.join(train_path, "../../" + LABELS_PATH + "/test"))
if not os.path.exists(clas_path):
os.makedirs(clas_path)
shutil.copy(test_dataset[f], clas_path)
执行分割
# source_path 所有的样本图片所在目录。save_path:分割完毕后的图片存放目录。data_split_rate:样本切分比例(训练集:验证集:测试集)
python xxx.py --source_path ./metadata/images --save_path ./dataset --dataset_split_rate 7:2:1样本被保存到了 dataset下,我们在dataset下创建xxx.yaml配置文件。
# 例如根目录名称为dataset
train: ./dataset/images/train
# 验证集
val: ./dataset/images/val
# 测试集
test: ./dataset/images/test
# 类别个数,标注的时候共涉及到了几个类别,就填几
nc: 3
# 类别列表, 枚举所有类别, 可以直接复制 labels/classes.txt 下的所有类别,粘贴到此处,记得带引号,与ckasses.txt 顺序不要错
names: ["a", "b", "c"]- 训练样本
conda activate yolo
# 进入yolov5源代码目录
cd yolov5
# 手动下载基础模型,指定为6.0版本
wget https://github.com/ultralytics/yolov5/releases/download/v6.0/yolov5s.pt
# 测试模型,执行完毕后,控制台会输出推理结果,Results saved to runs/detect/xxx 打开此文件夹,查看推理完毕后的结果是否正常
python detect.py --weights yolov5s.pt --img 640 --conf 0.25 --source data/images/
# 开始训练, 注意 --data 后参数,指向上面创建的yaml文件, 训练完毕后,系统会提示样本保存的目录:Optimizer stripped from runs/train/exp/weights/xxx.pt
python train.py --img 640 --batch 50 --epochs 100 --data ../metadata/xxx.yaml --weights yolov5s.pt --nosave --cache
# 如果出现 requirements: tensorboard>=2.4.1 not found and is required by YOLOv5,手动执行下面的命令
pip install tensorboard==2.4.1
# 测试模型是否正常 --weights 为训练完毕后的模型文件, --img 同训练时 img参数 --conf 最低置信度,当分值低于此分数时,不在图片中标注。--source 需要被推理的图片所在目录
python detect.py --weights runs/train/exp/weights/xxx.pt --img 640 --conf 0.25 --source data/images/- 检出为ncnn可用模型
# 检出为onnx模型,注意weights指向上一步训练出来的模型
python export.py --weights ./run/train/exp/weights/xxx.pt --img 640 640 --batch 1 --train --simplify --include onnx --opset 11
# 简化onnx模型
python -m onnxsim ./run/train/exp/weights/xxx.onnx ./run/train/exp/weights/yolov5s-sim.onnx
# 转换为ncnn模型,可以打开此网站 https://convertmodel.com/ 选择onnx转ncnn,如果自行编译了ncnn,可以打开install/bin 执行下边的命令
./onnx2ncnn ./run/train/exp/weights/yolov5s-sim.onnx ./run/train/exp/weights/yolov5s.param ./run/train/exp/weights/yolov5s.bin
- 修改配置
打开生成的yolov5s.param文件,修改Reshape参数,将0=6400、1600、400全部改为 0=-1

如下图

记录三组Permute数值的倒数第二列信息,如下图,例如我的样本配置结果为 "output", "365", "385"。如果你的Permute倒数第二列参数不是纯数值(除output之外),此时即代表后面所有的步骤都可能出现无法控制的结果,请重新开始训练,及检查你的yolo版本。

三、安卓端部署
- 打开Android Studio项目,创建或打开一个项目,切换项目显示模式为project

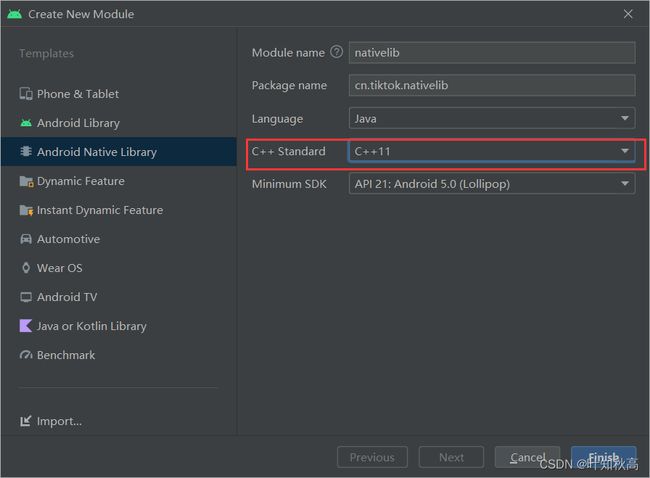
- 创建模块,模块类型选择Android Native Library,注意选择c++11
- 点击Android Studio工具栏 Tools -> SDK Manager,检查cmake 3.10.2是否已安装,如果没有安装,请安装此工具

- 修改插件目录下 src -> main -> cpp -> CMakeLists.txt文件。
project(yolov5ncnn) # 记录此名称,建议设置为插件名称
cmake_minimum_required(VERSION 3.4.1)
set(ncnn_DIR ${CMAKE_SOURCE_DIR}/ncnnvulkan/${ANDROID_ABI}/lib/cmake/ncnn)
find_package(ncnn REQUIRED)
# yolov5ncnn 参数与上名称对应,yolov5ncnn_jni.cpp即为模块创建时,自动创建在与CMakeLists.txt 平级的cpp文件,当然也可以后面手动创建
add_library(yolov5ncnn SHARED yolov5ncnn_jni.cpp)
# yolov5ncnn同上,下边两个参数不变
target_link_libraries(yolov5ncnn
ncnn
jnigraphics
)其中ncnnvulkan需要自行下载编译,或到此下载发行包,选择ncnn-xxx-android-vulkan.zip。如果github打不开,请在此下载(希望大家在此处下载,创作不易,支持一下)。
将ncnnvulkan依赖放入与CMakeLists.txt平级目录,结构如下
ncnnvulkan
├─arm64-v8a
│ ├─include
│ │ ├─glslang
│ │ │ ├─Include
│ │ │ ├─MachineIndependent
│ │ │ │ └─preprocessor
│ │ │ ├─Public
│ │ │ └─SPIRV
│ │ └─ncnn
│ └─lib
│ └─cmake
│ └─ncnn
├─armeabi-v7a
│ ├─include
│ │ ├─glslang
│ │ │ ├─Include
│ │ │ ├─MachineIndependent
│ │ │ │ └─preprocessor
│ │ │ ├─Public
│ │ │ └─SPIRV
│ │ └─ncnn
│ └─lib
│ └─cmake
│ │ ├─Include
│ │ ├─MachineIndependent
│ │ │ └─preprocessor
│ │ ├─Public
│ │ └─SPIRV
│ └─ncnn
└─lib
└─cmake
└─ncnn
CMakeLists.txt- 修改与CMakeLists.txt平级的yolov5ncnn_jni.cpp文件(CMakeLists.txt中指定的cpp文件)
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2020 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
#include
#include
#include
#include
#include
#include
// ncnn
#include "layer.h"
#include "net.h"
#include "benchmark.h"
static ncnn::UnlockedPoolAllocator g_blob_pool_allocator;
static ncnn::PoolAllocator g_workspace_pool_allocator;
static ncnn::Net yolov5;
class YoloV5Focus : public ncnn::Layer
{
public:
YoloV5Focus()
{
one_blob_only = true;
}
virtual int forward(const ncnn::Mat& bottom_blob, ncnn::Mat& top_blob, const ncnn::Option& opt) const
{
int w = bottom_blob.w;
int h = bottom_blob.h;
int channels = bottom_blob.c;
int outw = w / 2;
int outh = h / 2;
int outc = channels * 4;
top_blob.create(outw, outh, outc, 4u, 1, opt.blob_allocator);
if (top_blob.empty())
return -100;
#pragma omp parallel for num_threads(opt.num_threads)
for (int p = 0; p < outc; p++)
{
const float* ptr = bottom_blob.channel(p % channels).row((p / channels) % 2) + ((p / channels) / 2);
float* outptr = top_blob.channel(p);
for (int i = 0; i < outh; i++)
{
for (int j = 0; j < outw; j++)
{
*outptr = *ptr;
outptr += 1;
ptr += 2;
}
ptr += w;
}
}
return 0;
}
};
DEFINE_LAYER_CREATOR(YoloV5Focus)
struct Object
{
float x;
float y;
float w;
float h;
int label;
float prob;
};
static inline float intersection_area(const Object& a, const Object& b)
{
if (a.x > b.x + b.w || a.x + a.w < b.x || a.y > b.y + b.h || a.y + a.h < b.y)
{
// no intersection
return 0.f;
}
float inter_width = std::min(a.x + a.w, b.x + b.w) - std::max(a.x, b.x);
float inter_height = std::min(a.y + a.h, b.y + b.h) - std::max(a.y, b.y);
return inter_width * inter_height;
}
static void qsort_descent_inplace(std::vector - 注意 432、451、470行,在第 “二” 步中,“修改配置”步骤中Permute的值,将三处参数依次修改为上同参数值,即 432行修改为 **ex.extract("output", out);** 451行修改为 **ex.extract("365", out);** 470行修改为"ex.extract("385", out);"。
- 修改521行列表,与样本集中 labels下的classes.txt列表对应。
- 修改351行 constructortorId = env->GetMethodID(objCls, "", "(Lcom/tencent/yolov5ncnn/YoloV5Ncnn;)V");,将“com/tencent/yolov5ncnn/YoloV5Ncnn” 修改为自定义java类,注意前部的“L”和尾部的“V”保留(或者直接按照此包结构在模块下的src/main/java下创建此包和类文件)
- 修改348行 jclass localObjCls = env->FindClass("com/tencent/yolov5ncnn/YoloV5Ncnn$Obj"); 中 "com/tencent/yolov5ncnn/YoloV5Ncnn$Obj" 为自定义java类,同上,但不可丢掉后面的$Obj。
- 创建反射类
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2020 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
package com.tencent.yolov5ncnn;
import android.content.res.AssetManager;
import android.graphics.Bitmap;
public class YoloV5Ncnn
{
public native boolean Init(AssetManager mgr);
public class Obj {
// x
public float x;
// y
public float y;
// w
public float w;
// h
public float h;
// 标签
public String label;
// 置信度
public float prob;
@Override
public String toString() {
return "Obj{" +
"x=" + x +
", y=" + y +
", w=" + w +
", h=" + h +
", label='" + label + '\'' +
", prob=" + prob +
'}';
}
}
public native Obj[] Detect(Bitmap bitmap, boolean use_gpu);
static {
// 为CMakeLists.txt中配置的project名称
System.loadLibrary("yolov5ncnn");
}
}- 修改模块的build.grade配置
plugins {
id 'com.android.library'
}
android {
namespace 'cn.tiktok.ncnn'
compileSdk 24
defaultConfig {
minSdk 24
archivesBaseName = "$applicationId"
testInstrumentationRunner "androidx.test.runner.AndroidJUnitRunner"
consumerProguardFiles "consumer-rules.pro"
externalNativeBuild {
cmake {
cppFlags "-std=c++11"
}
}
ndk {
// 可减少平台支持,减小包体积
abiFilters "armeabi-v7a", "arm64-v8a", "x86", "x86_64"
}
}
buildTypes {
release {
minifyEnabled false
proguardFiles getDefaultProguardFile('proguard-android-optimize.txt'), 'proguard-rules.pro'
}
}
externalNativeBuild {
cmake {
// 此处指向CMakeLists.txt 所在文件夹
path "src/main/jni/CMakeLists.txt"
version "3.10.2"
}
}
compileOptions {
sourceCompatibility JavaVersion.VERSION_1_8
targetCompatibility JavaVersion.VERSION_1_8
}
}
dependencies {
implementation 'androidx.appcompat:appcompat:1.4.1'
implementation 'com.google.android.material:material:1.5.0'
testImplementation 'junit:junit:4.13.2'
androidTestImplementation 'androidx.test.ext:junit:1.1.3'
androidTestImplementation 'androidx.test.espresso:espresso-core:3.4.0'
}- 部署模型
在模块的src/main目录下创建 assets 文件夹,然后检查文件夹属性。如果被创建为了普通文件夹,如下图所示。

则在此文件夹上右键,选择 Mark Directory as,选择Resources root。
我们在第“二”步的“检出为ncnn可用模型”步骤,生成了 yolov5s.param 和 yolov5s.bin两个文件,将两个文件复制到assets文件夹下。
然后在app中引入此模块,并使用,注意修改为模块名称

最后选择Android Studio菜单栏 File -> Sync Project wth Gradle FIles,等待执行完毕。
四、测试使用
public class MainActivity extends Activity{
private YoloV5Ncnn yolov5ncnn = new YoloV5Ncnn();
/** Called when the activity is first created. */
@Override
public void onCreate(Bundle savedInstanceState){
super.onCreate(savedInstanceState);
// 初始化
boolean ret_init = yolov5ncnn.Init(getAssets());
if (!ret_init){
Log.e("MainActivity", "yolov5ncnn Init failed");
}
// 图片、是否使用GPU
YoloV5Ncnn.Obj[] objects = yolov5ncnn.Detect(imageBitmap, false);
// 根据注释解析YoloV5Ncnn.Obj
...
}
}