笔记 | PyTorch安装及入门教程
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本文内容概述如何安装PyTorch以及PyTorch的一些简单操作
本期笔记目录:

2.1 为何选择PyTorch?
PyTorch主要由4个包组成:
torch:可以将张量转换为torch.cuda.TensorFloat
torch.autograd:自动梯度
torch.nn:具有共享层和损失函数的神经网络库
torch.optim:具有通用的优化算法包(SGD、Adam)
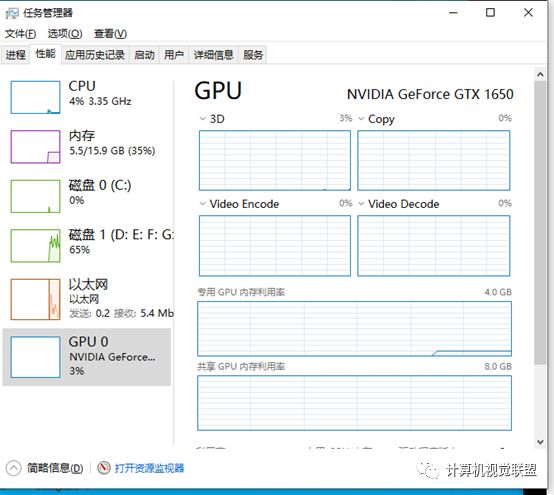
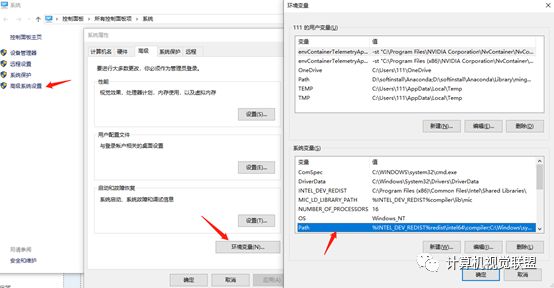
2.2 安装Anaconda
Anaconda官网地址
https://www.anaconda.com/products/individual



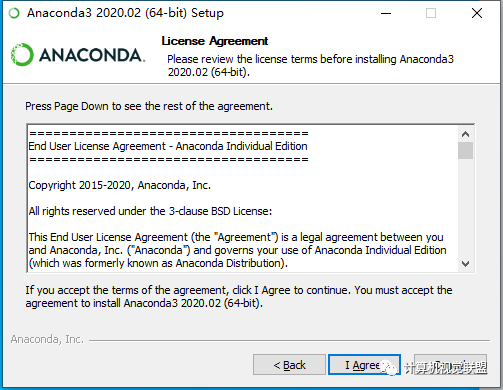
这里选择All Users,一步一步操作即可

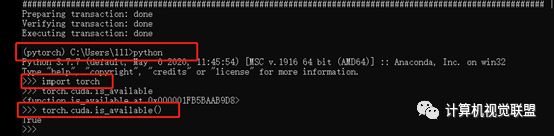
安装成功与否

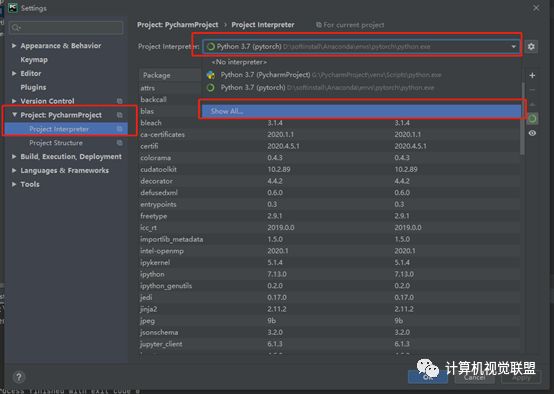
2.3 安装Pytorch
由于pytorch有不同的版本,为了方便使用不同的版本,我们新建不同的环境(类比建造房屋,一个房屋放一个版本的pytorch),用来安装现有版本的pytorch
conda create –n pytorch python=3.7 
选择Y
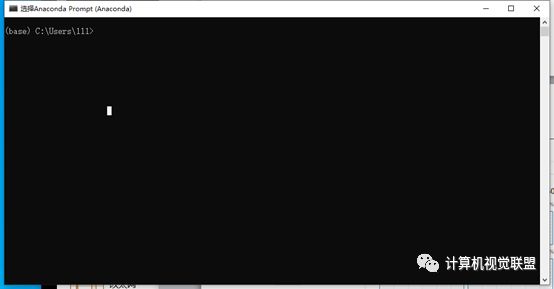
conda info –envs 
conda activate pytorch 
安装Pytorch
Pytorch的官方网站:
https://pytorch.org/

conda install pytorch torchvision cudatoolkit=10.2 -c pytorch 
选择y




2.4 Numpy 与 Tensor
Numpy会把ndarray 放在CPU中运行加速,而由Torch产生的Tensor会放在GPU中进行加速运算
2.4.1 Tensor概述
从接口的角度划分:
1. torch.function torch.sum torch.add
2. tensor.function tensor.view tensor.add从修改方式的角度划分:
1. 不修改自身数据,x.add(y),x数据不变,返回新的Tensor
2. 修改自身数据,x.add_(y),运算结果存在x中,x被修改import torch
x=torch.tensor([1,2])
y=torch.tensor([3,4])
z=x.add(y)
print(z)
print(x)
x.add_(y)
print(x)2.4.2 创建Tensor
创建Tensor的常用方法
* Tensor(*size) 从参数构建,List或者Numpy都行
* eye(row,column) 指定行数和列数的二维Tensor
* linspace(start,end,steps) 均匀分成
* longspace(start,end,steps) 10^start到10^end,均匀分成
* rand/randn(*size) 生成[0,1)均与分布,标准正态分布
* ones(*size) 返回指定shape张量,元素为1
* zeros(*size) 返回指定shape张量,元素为0
* ones_like(t)
* zeros_like(t)
* arange(start,end,stop)
* from_Numpy(ndarray)import torch
print(torch.Tensor([1,2,3,4,5,6]))
print(torch.Tensor(2,3))
t = torch.Tensor([[1,2,3],[4,5,6]])
print(t)
print(t.size())
t.shape
torch.Tensor(t.size())torch.Tensor与torch.tensor的区别:
torch.Tensor是torch.empty 和 torch.tensor 之间的混合。传入数据时,torch.Tensor使用全局默认dtype(FloatTensor),而torch.tensor是从数据中推断数据类型
torch.tensor(1)返回的是固定值1;torch.Tensor返回的是大小为1的张量
import torch t1=torch.Tensor(1) t2=torch.tensor(1) print("t1的值{},t1的数据类型{}".format(t1,t1.type())) print("t2的值{},t2的数据类型{}".format(t2,t2.type())) # 输出 t1的值tensor([0.]),t1的数据类型torch.FloatTensor t2的值1,t2的数据类型torch.LongTensorimport torch print(torch.eye(2,2)) print(torch.zeros(2,3)) print(torch.linspace(1,10,4)) print(torch.rand(2,3)) print(torch.randn(2,3)) print(torch.zeros_like(torch.rand(2,3))) #输出结果 tensor([[1., 0.], [0., 1.]]) tensor([[0., 0., 0.], [0., 0., 0.]]) tensor([ 1., 4., 7., 10.]) tensor([[0.5942, 0.1468, 0.3175], [0.2744, 0.9218, 0.7266]]) tensor([[ 1.0187, -0.2809, 1.0421], [-0.1697, -0.0604, -1.6645]]) tensor([[0., 0., 0.], [0., 0., 0.]])2.4.3 修改Tensor形状
常用的tensor修改形状的函数
* size() 计算张量属性值,与shape等价
* numel(input) 计算张量的元素个数
* view(*shape) 修改张量的shape,共享内存,修改一个同时修改。
* resize() 类似于view
* item 返回标量
* unsqueeze 在指定维度增加一个1
* squeeze 在指定维度压缩一个1import torch
x = torch.randn(2,3)
print(x.size())
print("维度:" ,x.dim())
print("这里把矩阵变为3x2的矩阵:",x.view(3,2))
print("这里把x展为1维向量:", x.view(-1))
y=x.view(-1)
z=torch.unsqueeze(y,0)
print("没增加维度前:",y," 的维度",y.size())
print("增加一个维度:", z)
print("z的维度:", z.size())
print("z的个数:", z.numel())
# 输出结果
torch.Size([2, 3])
维度:2
这里把矩阵变为3x2的矩阵:tensor([[ 1.3014, 1.0249],
[ 0.8903, -0.4908],
[-0.3393, 0.7987]])
这里把x展为1维向量:tensor([ 1.3014, 1.0249, 0.8903, -0.4908, -0.3393, 0.7987])
没增加维度前:tensor([ 1.3014, 1.0249, 0.8903, -0.4908, -0.3393, 0.7987]) 的维度 torch.Size([6])
增加一个维度: tensor([[ 1.3014, 1.0249, 0.8903, -0.4908, -0.3393, 0.7987]])
z的维度:torch.Size([1, 6])
z的个数:6torch.view 与 torch.reshape 的异同
reshape()可以由torch.reshape()或者torch.Tensor.reshape()调用;而view()只可以由torch.Tensor.view()调用
新的size必须与原来的size与stride兼容,否则,在view之前必须调用contiguous()方法
同样返回数据量相同的但形状不同的Tensor,若满足view条件,则不会copy,若不满足,就copy
只想重塑,就使用torch.reshape,如果考虑内存并共享,就用torch.view
2.4.4 索引操作
常用选择操作的函数
* index_select(input,dim,index) 在指定维度上选择列或者行
* nonzero(input) 获取非0元素的下标
* masked_select(input,mask) 使用二元值进行选择
* gather(input,dim,index) 指定维度选择数据,输出形状与index一致
* scatter_(input,dim,index,src) gather的反操作,根据指定索引补充数据import torch# 设置一个随机种子torch.manual_seed(100)# print(torch.manual_seed(100))x = torch.randn(2,3)
print(x)# 索引获取第一行所有数据x[0,:]
print(x[0,:])# 获取最后一列的数据x[:,-1]
print(x[:,-1])# 生成是否大于0的张量mask=x>0print(mask)# 获取大于0的值torch.masked_select(x,mask)
print(torch.masked_select(x,mask))# 获取非0下标,即行、列的索引torch.nonzero(mask)
print(torch.nonzero(mask))# 获取指定索引对应的值,输出根据以下规则得到# out[i][j] = input[index[i][j][j]] # 如果 if dim == 0# out[i][j] = input[i][index[i][j]] # 如果 if dim == 1index = torch.LongTensor([[0,1,1]])
print(index)
torch.gather(x,0,index)
index=torch.LongTensor([[0,1,1],[1,1,1]])
a = torch.gather(x,1,index)
print("a: ",a)# 把a的值返回到2x3的0矩阵中z = torch.zeros(2,3)
z.scatter_(1,index,a)# 输出结果tensor([[ 0.3607, -0.2859, -0.3938],
[ 0.2429, -1.3833, -2.3134]])
tensor([ 0.3607, -0.2859, -0.3938])
tensor([-0.3938, -2.3134])
tensor([[ True, False, False],
[ True, False, False]])
tensor([0.3607, 0.2429])
tensor([[0, 0],
[1, 0]])
tensor([[0, 1, 1]])
a: tensor([[ 0.3607, -0.2859, -0.2859],
[-1.3833, -1.3833, -1.3833]])
Out[25]:
tensor([[ 0.3607, -0.2859, 0.0000],
[ 0.0000, -1.3833, 0.0000]])2.4.5 广播机制
import torch
import numpy as np
A = np.arange(0,40,10).reshape(4,1)
B = np.arange(0,3)
A1 = torch.from_numpy(A) #形状4x1
B1 = torch.from_numpy(B) #形状3
#自动广播
C=A1+B1
#也可以根据广播机制手动配置
# B1要与A1看齐,变成(1,3)
B2=B1.unsqueeze(0)
A2=A1.expand(4,3)
B3=B2.expand(4,3)
C1=A2+B3
print("A1:",A1)
print("B1:",B1)
print("C:",C)
print("B2:",B2)
print("A2:",A2)
print("B3:",B3)
print("C1:",C1)
# 输出结果
A1: tensor([[ 0],
[10],
[20],
[30]], dtype=torch.int32)
B1: tensor([0, 1, 2], dtype=torch.int32)
C: tensor([[ 0, 1, 2],
[10, 11, 12],
[20, 21, 22],
[30, 31, 32]], dtype=torch.int32)
B2: tensor([[0, 1, 2]], dtype=torch.int32)
A2: tensor([[ 0, 0, 0],
[10, 10, 10],
[20, 20, 20],
[30, 30, 30]], dtype=torch.int32)
B3: tensor([[0, 1, 2],
[0, 1, 2],
[0, 1, 2],
[0, 1, 2]], dtype=torch.int32)
C1: tensor([[ 0, 1, 2],
[10, 11, 12],
[20, 21, 22],
[30, 31, 32]], dtype=torch.int32)2.4.6 逐元素操作
常见的逐元素操作
* abs add 绝对值,加法
* addcdiv(t,v,t1,t2) t1与t2按元素除后,乘v加t
* addcmul(t,v,t1,t2) t1与t2按元素乘后,乘v加t
* ceil floor 向上取整;向下取整
* clamp(t, min , max) 将张量元素限制在指定区间
* exp log pow 指数,对数,幂
* mul( 或 * ) neg 逐元素乘法,取反
* sigmoid tanh softmax 激活函数
* sign sqrt 取符号,开根号import torch
t = torch.randn(1,3)
t1 = torch.randn(3,1)
t2 = torch.randn(1,3)
# t+0.1*(t1/t2)
a = torch.addcdiv(t, 0.1, t1, t2)
#计算sigmoid
b = torch.sigmoid(t)
# 将t限制在【0,1】之间
c = torch.clamp(t,0,1)
#t+2进行直接运算
t.add_(2)
print("t: ",t)
print("t1: ",t1)
print("t2: ",t2)
print("a: ",a)
print("b: ",b)
print("c: ",c)
# 结果
t: tensor([[1.7266, 2.0815, 3.4672]])
t1: tensor([[0.2309],
[0.3393],
[1.3639]])
t2: tensor([[-0.5414, -1.4628, -0.4191]])
a: tensor([[-0.3161, 0.0657, 1.4121],
[-0.3361, 0.0583, 1.3863],
[-0.5254, -0.0117, 1.1418]])
b: tensor([[0.4321, 0.5204, 0.8126]])
c: tensor([[0.0000, 0.0815, 1.0000]])2.4.7 归并操作
常用的归并操作
* cumprod(t,axis) 在指定维度上对t进行累积
* cumsum 对指定维度进行累加
* dist(a,b,p=2) 返回a,b之间的p阶范数
* mean ; median 平均值,中位数
* std var 标准差 方差
* norm(t,p=2) 返回t的p阶范数
* prod(t) sum(t) 返回所有元素的积,和import torch
a=torch.linspace(0,10,6)
#使用view变为2x3矩阵
a=a.view((2,3))
print("a: ",a)
# 沿着y轴方向累加,dim=0
b=a.sum(dim=0)
print("b: ",b)
# 沿着y轴方向累加,dim=0,并保留含1的维度
b=a.sum(dim=0,keepdim=True)
print("b: ",b)
# 结果
a: tensor([[ 0., 2., 4.],
[ 6., 8., 10.]])
b: tensor([ 6., 10., 14.])
b: tensor([[ 6., 10., 14.]])2.4.8 比较操作
常用的比较函数
* eq 是否相等
* equal 是否相同的shape和值
* ge / le / gt / lt 大于、小于、大于等于、小于等于
* max / min (t,axis) 返回最值,指定axis返回下标
* topk(t,k,axis) 在指定维度上取最高的k个值import torch
x=torch.linspace(0,10,6).view(2,3)
print(torch.max(x))
print(torch.max(x,dim=0))
print(torch.topk(x,1,dim=0))
# 结果
tensor([[ 0., 2., 4.],
[ 6., 8., 10.]])
tensor(10.)
torch.return_types.max(
values=tensor([ 6., 8., 10.]),
indices=tensor([1, 1, 1]))
torch.return_types.topk(
values=tensor([[ 6., 8., 10.]]),
indices=tensor([[1, 1, 1]]))2.4.9 矩阵操作
常用的矩阵函数
* dot(t1,t2) 计算内积
* mm(mat1,mat2) bmm(batch1,batch2) 计算矩阵乘积,3D矩阵
* mv(t1,v1) 计算矩阵与向量乘法
* t 转置
* svd(t) 计算SVDimport torch
a=torch.tensor([2,3])
b=torch.tensor([3,4])
print(torch.dot(a,b))
x=torch.randint(10,(2,3))
print(x)
y=torch.randint(6,(3,4))
print(y)
print(torch.mm(x,y))
x=torch.randint(10,(2,2,3))
print(x)
y=torch.randint(6,(2,3,4))
print(y)
print(torch.bmm(x,y))
#结果
tensor(18)
tensor([[1, 1, 1],
[3, 1, 9]])
tensor([[1, 4, 4, 5],
[1, 5, 2, 4],
[2, 0, 3, 3]])
tensor([[ 4, 9, 9, 12],
[22, 17, 41, 46]])
tensor([[[0, 9, 3],
[7, 1, 4]],
[[9, 6, 3],
[2, 0, 1]]])
tensor([[[0, 5, 1, 3],
[2, 4, 3, 1],
[5, 2, 1, 1]],
[[4, 3, 0, 0],
[4, 5, 0, 4],
[0, 0, 3, 3]]])
tensor([[[33, 42, 30, 12],
[22, 47, 14, 26]],
[[60, 57, 9, 33],
[ 8, 6, 3, 3]]])2.4.10 PyTorch与Numpy比较
PyTorch与Numpy函数对照表
| np.ndarry([3.2,4.3],dtype=np.float16) | torch.tensor([3.2,4.3], dtype=torch.float16 | |
|---|---|---|
| x.copy() | x.clone() | |
| np.dot | torch.mm | |
| x.ndim | x.dim | |
| x.size | x.nelement() | |
| x.reshape | x.reshape,x.view | |
| x.flatten | x.view(-1) | |
| np.floor(x) | torch.floor(x), x.floor() | |
| np.less | x.lt | |
| np.random.seed | torch.manual_seed |
2.5 Tensor与Autograd
2.5.1 自动求导的要点
创建叶子节点的Tensor,使用requires_grad指定是否需要对其进行操作
可以利用requiresgrad()方法修改Tensor的requires_grad属性。可以调用 .detach()或者 with torch.no_grad()
自动赋予grad_fn属性,表示梯度函数。
执行backward()函数后,保存到grad属性中了。计算完成,非叶子节点梯度会自动释放
backward()函数接收参数,维度相同。
反向传播的中间缓存会被清空,如果需要多次反向传播,需指定backward中的retain_graph=True 多次反向传播时,梯度累加
非叶子节点的梯度backward 调用后即被清空
用 torch.no_grad()包裹代码块形式阻止autograd去追踪那些标记为.requesgrad=True的张量历史记录
2.5.2 计算图
表达式z=wx+b
可以写成:y=wx z=y+b
x,w,b为变量;y,z是计算得到的变量,不是叶子节点
根据链式法则计算的
z对x求导为w
z对w求导为x
z对b求导为1
2.5.3 标量反向传播
主要步骤如下:
定义叶子节点及算子节点
查看叶子节点、非叶子节点的其他属性
自动求导,实现梯度方向传播,也就是梯度的反向传播
分步进行展示
(1)定义叶子节点及算子节点
import torch
# 定义输入张量x
x=torch.Tensor([2])
# 初始化权重参数w,偏移量b,并设置require_grad属性为True
w=torch.randn(1,requires_grad=True)
b=torch.randn(1,requires_grad=True)
# 实现前向传播
y=torch.mul(w,x) # 等价于w*x
z=torch.add(y,b) # 等价于y+b
# 查看x,w,b叶子节点的requires_grad属性
print("x,w,b叶子节点的requires_grad属性分别为:{},{},{}".format(x.requires_grad,w.requires_grad,b.requires_grad))运行结果:
x,w,b叶子节点的requires_grad属性分别为:False,True,True(2)查看叶子节点、非叶子节点的其他属性
# 查看非叶子节点的requires_grad属性
print("y, z的requires_grad属性分别为:{},{}".format(y.requires_grad,z.requires_grad))
# 查看各节点是否为叶子节点
print("x, w, b, y, z是否为叶子节点:{},{},{},{},{}".format(x.is_leaf,w.is_leaf,b.is_leaf,y.is_leaf,z.is_leaf))
# 查看叶子节点的grad_fn属性
print("x, w, b的 grad_fn属性:{},{},{}".format(x.grad_fn,w.grad_fn,b.grad_fn))
# 查看非叶子节点的grad_fn属性
print("y, z是否为叶子节点:{},{}".format(y.grad_fn,z.grad_fn))运行结果:
y, z的requires_grad属性分别为:True,True
x, w, b, y, z是否为叶子节点:True,True,True,False,False
x, w, b的 grad_fn属性:None,None,None
y, z是否为叶子节点:, (3)自动求导,实现梯度方向传播,也就是梯度的反向传播
# 基于张量z进行求导,执行backward后计算图会自动清空
z.backward()
# 如果需要多次使用backward,需要修改参数为retain_graph=True,此时梯度累加
# z.backward(retain_graph=True)
# 查看叶子节点的梯度,x是叶子节点但是无需求导,故梯度为None
print("参数w, b,x的梯度分别为:{},{},{}".format(w.grad,b.grad,x.grad))
# 非叶子节点的梯度,执行backward后会自动清空
print("非叶子节点y, z的梯度分别为:{},{}".format(y.grad,z.grad))运行结果:
参数w, b,x的梯度分别为:tensor([2.]),tensor([1.]),None
非叶子节点y, z的梯度分别为:None,None2.5.4 非标量的反向传播
张量对张量的求导转换成标量对张量的求导
backward函数的格式
backward(gradient=None, retain_graph=None, create_graph=False)举例:
# (1)定义叶子节点及计算节点
import torch
# 定义叶子节点张量x,形状为1x2
x = torch.tensor([[2, 3]], dtype=torch.float, requires_grad=True)
# 初始化雅可比矩阵
J = torch.zeros(2,2)
# 初始化目标张量,形状1x2
y = torch.zeros(1,2)
# 定义y与x之间的映射关系
# y1=x1**2 + 3*x2, y2=x2**2 + 2*x1
y[0, 0] = x[0, 0]**2+3*x[0, 1]
y[0, 1] = x[0, 1]**2+2*x[0, 0]
# 首先让v=(1,0)得到y1对x的梯度
# 然后让v=(0,1)得到y2对x的梯度
# 需要重复使用backward(),所以设置参数retain_graph=True
# 生成y1对x的梯度
y.backward(torch.Tensor([[1,0]]),retain_graph=True)
J[0]=x.grad
# 梯度是累加的,所以需要对x的梯度清零
x.grad = torch.zeros_like(x.grad)
# 生成y2对x的梯度
y.backward(torch.Tensor([[0,1]]))
J[1]=x.grad
# 显示雅克比矩阵的值
print(J)运行结果:
tensor([[4., 3.],
[2., 6.]])2.6 使用Numpy实现机器学习
给出一个数组x,基于表达式y=3x^2+2,加上一些噪声数据到达另一组数据y
构建一个机器学学模型,学习y=wx^2+b中的2个参数,w和b,利用x,y数据为训练数据
## (1)导入所需要的库
# -*- coding : utf-8 -*-
import numpy as np
%matplotlib inline
from matplotlib import pyplot as plt
## (2)生成随机数据x及目标y
# 设置随机种子,生成同一份数据,方便多种方法比较
np.random.seed(100)
x = np.linspace(-1,1,100).reshape(100,1)
y = 3*np.power(x,2) + 2 + 0.2*np.random.rand(x.size).reshape(100,1)
## (3)查看x,y数据分布情况
plt.scatter(x,y)
plt.show()
## (4)初始化权重参数
w1 = np.random.rand(1,1)
b1 = np.random.rand(1,1)
## (5)训练模型
lr =0.001 # 学习率
for i in range(800):
# 前向传播
y_pred = np.power(x,2)*w1+b1
# 定义损失函数
loss = 0.5 * (y_pred - y) **2
loss = loss.sum
# 计算梯度
grad_w = np.sum((y_pred - y)*np.power(x,2))
grad_b = np.sum(y_pred - y)
# 使用梯度下降法,使得loss最小
w1 -= lr * grad_w
b1 -= lr * grad_b
## 可视化结果
plt.plot(x, y_pred, 'r-', label='predict')
plt.scatter(x,y,color='blue',marker='o',label='true')
plt.xlim(-1,1)
plt.ylim(2,6)
plt.legend()
plt.show()
print(w1,b1) 
2.7 使用Tensor及Autograd实现机器学习
# (1) 导入所需要的库
import torch as t
%matplotlib inline
from matplotlib import pyplot as plt
# (2)生成训练数据,并可视化数据分布情况
t.manual_seed(100)
dtype=t.float
# 生成x坐标数据,x为tensor,需要把x的形状转换为100x1
x = t.unsqueeze(t.linspace(-1,1,100),dim=1)
# 生成y坐标数据,y为tensor,形状为100x1,加上一些噪声
y = 3*x.pow(2)+ 2 + 0.2*t.rand(x.size())
# 画图,将tensor数据转换为numpy数据
plt.scatter(x.numpy(),y.numpy())
plt.show()
# (3)初始化权重
# 随机初始化参数,w,b需要学习,所以设定requires_grad=True
w = t.randn(1,1,dtype=dtype,requires_grad=True)
b = t.zeros(1,1,dtype=dtype,requires_grad=True)
# (4)训练模型
lr = 0.001 # 学习率
for ii in range(800):
# 前向传播,定义损失函数
y_pred = x.pow(2).mm(w) + b
loss = 0.5 * (y_pred - y) **2
loss = loss.sum()
# 自动计算梯度
loss.backward()
# 手动更新参数,使用torch.no_grad(),使上下文切断自动求导计算
with t.no_grad():
w -= lr * w.grad
b -= lr * b.grad
# 梯度清零
w.grad.zero_()
b.grad.zero_()
# (5)可视化训练结果
plt.plot(x.numpy(), y_pred.detach().numpy(), 'r-', label='predict')
plt.scatter(x.numpy(),y.numpy(),color='blue',marker='o',label='true')
plt.xlim(-1,1)
plt.ylim(2,6)
plt.legend()
plt.show()
print(w,b) 
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

