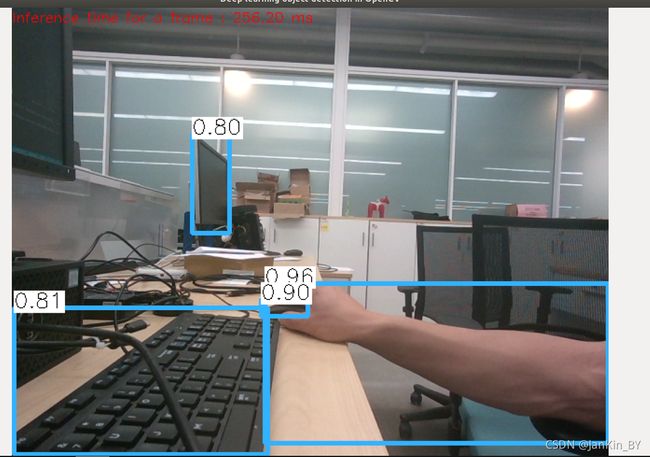
ubuntu 18.04 C++ OPENCV4.2.0 YOLOV3 图片 视频 相机
参考:C++调用Yolov3模型实现目标检测_LucienT、的博客-CSDN博客_c++ yolo
https://blog.csdn.net/weixin_46958585/article/details/107057406
1.下载下面3个文件,放入同一文件夹
使用开源权重文件,此训练模型包含80种物体
文件下载地址:
预训练权重文件:
https://pjreddie.com/media/files/yolov3.weights
网络配置文件:
https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg
coco.names:
https://github.com/pjreddie/darknet/blob/master/data/coco.names
2.创建yolov3.cpp
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace dnn;
using namespace std;
float confThreshold = 0.5; // Confidence threshold
float nmsThreshold = 0.4; // Non-maximum suppression threshold
int inpWidth = 416; // Width of network's input image
int inpHeight = 416; // Height of network's input image
vector classes;
// Remove the bounding boxes with low confidence using non-maxima suppression
void postprocess(Mat& frame, const vector& out);
// Draw the predicted bounding box
void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame);
// Get the names of the output layers
vector getOutputsNames(const Net& net);
void detect_image(string image_path, string modelWeights, string modelConfiguration, string classesFile);
void detect_video(string video_path, string modelWeights, string modelConfiguration, string classesFile);
void detect_camera(char* camera_num,string modelWeights, string modelConfiguration, string classesFile);
int main(int argc, char** argv)
{
// Give the configuration and weight files for the model
String modelConfiguration = "/home/user-e290/Desktop/depth_color_yolov3/yolov3.cfg";
String modelWeights = "/home/user-e290/Desktop/depth_color_yolov3/yolov3.weights";
string image_path = "/home/user-e290/Desktop/depth_color_yolov3/dog.jpeg";
string classesFile = "/home/user-e290/Desktop/depth_color_yolov3/coco.names";// "coco.names";
//detect_image(image_path, modelWeights, modelConfiguration, classesFile);
string video_path = "/home/user-e290/Desktop/depth_color_yolov3/movie.avi";
//detect_video(video_path, modelWeights, modelConfiguration, classesFile);
detect_camera(argv[1], modelWeights, modelConfiguration, classesFile);
cv::waitKey(10);
return 0;
}
void detect_image(string image_path, string modelWeights, string modelConfiguration, string classesFile) {
// Load names of classes
ifstream ifs(classesFile.c_str());
string line;
while (getline(ifs, line)) classes.push_back(line);
// Load the network
Net net = readNetFromDarknet(modelConfiguration, modelWeights);
net.setPreferableBackend(DNN_BACKEND_OPENCV);
net.setPreferableTarget(DNN_TARGET_OPENCL);
// Open a video file or an image file or a camera stream.
string str, outputFile;
cv::Mat frame = cv::imread(image_path);
// Create a window
static const string kWinName = "Deep learning object detection in OpenCV";
namedWindow(kWinName, WINDOW_NORMAL);
// Stop the program if reached end of video
// Create a 4D blob from a frame.
Mat blob;
blobFromImage(frame, blob, 1 / 255.0, cv::Size(inpWidth, inpHeight), Scalar(0, 0, 0), true, false);
//Sets the input to the network
net.setInput(blob);
// Runs the forward pass to get output of the output layers
vector outs;
net.forward(outs, getOutputsNames(net));
// Remove the bounding boxes with low confidence
postprocess(frame, outs);
// Put efficiency information. The function getPerfProfile returns the overall time for inference(t) and the timings for each of the layers(in layersTimes)
vector layersTimes;
double freq = getTickFrequency() / 1000;
double t = net.getPerfProfile(layersTimes) / freq;
string label = format("Inference time for a frame : %.2f ms", t);
putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 255));
// Write the frame with the detection boxes
imshow(kWinName, frame);
cv::waitKey(30);
}
void detect_video(string video_path, string modelWeights, string modelConfiguration, string classesFile) {
string outputFile = "/home/user-e290/Desktop/depth_color_yolov3/yolo_out_cpp.avi";
// Load na.mes of classes
ifstream ifs(classesFile.c_str());
string line;
while (getline(ifs, line)) classes.push_back(line);
// Load the network
Net net = readNetFromDarknet(modelConfiguration, modelWeights);
net.setPreferableBackend(DNN_BACKEND_OPENCV);
net.setPreferableTarget(DNN_TARGET_CPU);
// Open a video file or an image file or a camera stream.
VideoCapture cap;
//VideoWriter video;
Mat frame, blob;
try {
// Open the video file
ifstream ifile(video_path);
if (!ifile) throw("error");
cap.open(video_path);
}
catch (...) {
cout << "Could not open the input image/video stream" << endl;
return;
}
// Create a window
static const string kWinName = "Deep learning object detection in OpenCV";
namedWindow(kWinName, WINDOW_NORMAL);
// Process frames.
while (waitKey(1) < 0)
{
// get frame from the video
cap >> frame;
// Stop the program if reached end of video
if (frame.empty()) {
cout << "Done processing !!!" << endl;
cout << "Output file is stored as " << outputFile << endl;
waitKey(3000);
break;
}
// Create a 4D blob from a frame.
blobFromImage(frame, blob, 1 / 255.0, cv::Size(inpWidth, inpHeight), Scalar(0, 0, 0), true, false);
//Sets the input to the network
net.setInput(blob);
// Runs the forward pass to get output of the output layers
vector outs;
net.forward(outs, getOutputsNames(net));
// Remove the bounding boxes with low confidence
postprocess(frame, outs);
// Put efficiency information. The function getPerfProfile returns the overall time for inference(t) and the timings for each of the layers(in layersTimes)
vector layersTimes;
double freq = getTickFrequency() / 1000;
double t = net.getPerfProfile(layersTimes) / freq;
string label = format("Inference time for a frame : %.2f ms", t);
putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 255));
// Write the frame with the detection boxes
Mat detectedFrame;
frame.convertTo(detectedFrame, CV_8U);
//video.write(detectedFrame);
imshow(kWinName, frame);
}
cap.release();
//video.release();
}
// Remove the bounding boxes with low confidence using non-maxima suppression
void postprocess(Mat& frame, const vector& outs)
{
vector classIds;
vector confidences;
vector boxes;
for (size_t i = 0; i < outs.size(); ++i)
{
// Scan through all the bounding boxes output from the network and keep only the
// ones with high confidence scores. Assign the box's class label as the class
// with the highest score for the box.
float* data = (float*)outs[i].data;
for (int j = 0; j < outs[i].rows; ++j, data += outs[i].cols)
{
Mat scores = outs[i].row(j).colRange(5, outs[i].cols);
Point classIdPoint;
double confidence;
// Get the value and location of the maximum score
minMaxLoc(scores, 0, &confidence, 0, &classIdPoint);
if (confidence > confThreshold)
{
int centerX = (int)(data[0] * frame.cols);
int centerY = (int)(data[1] * frame.rows);
int width = (int)(data[2] * frame.cols);
int height = (int)(data[3] * frame.rows);
int left = centerX - width / 2;
int top = centerY - height / 2;
classIds.push_back(classIdPoint.x);
confidences.push_back((float)confidence);
boxes.push_back(Rect(left, top, width, height));
}
}
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
vector indices;
NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame);
}
}
// Draw the predicted bounding box
void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame)
{
//Draw a rectangle displaying the bounding box
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(255, 178, 50), 3);
//Get the label for the class name and its confidence
string label = format("%.2f", conf);
if (!classes.empty())
{
CV_Assert(classId < (int)classes.size());
label = classes[classId] + ":" + label;
}
//Display the label at the top of the bounding box
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
rectangle(frame, Point(left, top - round(1.5*labelSize.height)), Point(left + round(1.5*labelSize.width), top + baseLine), Scalar(255, 255, 255), FILLED);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 0, 0), 1);
}
// Get the names of the output layers
vector getOutputsNames(const Net& net)
{
static vector names;
if (names.empty())
{
//Get the indices of the output layers, i.e. the layers with unconnected outputs
vector outLayers = net.getUnconnectedOutLayers();
//get the names of all the layers in the network
vector layersNames = net.getLayerNames();
// Get the names of the output layers in names
names.resize(outLayers.size());
for (size_t i = 0; i < outLayers.size(); ++i)
names[i] = layersNames[outLayers[i] - 1];
}
return names;
}
//摄像头
void detect_camera(char* camera_num,string modelWeights, string modelConfiguration, string classesFile) {
// string outputFile = "/home/user-e290/Desktop/depth_color_yolov3/yolo_out_cpp.avi";
// Load na.mes of classes
//ifstream ifs(classesFile.c_str());
//string line;
//while (getline(ifs, line)) classes.push_back(line);
// Load the network
Net net = readNetFromDarknet(modelConfiguration, modelWeights);
net.setPreferableBackend(DNN_BACKEND_OPENCV);
net.setPreferableTarget(DNN_TARGET_CPU);
// Open a video file or an image file or a camera stream.
VideoCapture cap(atoi(camera_num));
//VideoWriter video;
Mat frame, blob;
/*try {
// Open the video file
ifstream ifile(video_path);
if (!ifile) throw("error");
cap.open(video_path);
}
catch (...) {
cout << "Could not open the input image/video stream" << endl;
return;
}*/
// Create a window
static const string kWinName = "Deep learning object detection in OpenCV";
namedWindow(kWinName, WINDOW_NORMAL);
// Process frames.
while (waitKey(1) < 0)
{
// get frame from the video
cap >> frame;
// Stop the program if reached end of video
if (frame.empty()) {
cout << "Done processing !!!" << endl;
//cout << "Output file is stored as " << outputFile << endl;
waitKey(3000);
break;
}
// Create a 4D blob from a frame.
blobFromImage(frame, blob, 1 / 255.0, cv::Size(inpWidth, inpHeight), Scalar(0, 0, 0), true, false);
//Sets the input to the network
net.setInput(blob);
// Runs the forward pass to get output of the output layers
vector outs;
net.forward(outs, getOutputsNames(net));
// Remove the bounding boxes with low confidence
postprocess(frame, outs);
// Put efficiency information. The function getPerfProfile returns the overall time for inference(t) and the timings for each of the layers(in layersTimes)
vector layersTimes;
double freq = getTickFrequency() / 1000;
double t = net.getPerfProfile(layersTimes) / freq;
string label = format("Inference time for a frame : %.2f ms", t);
putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 255));
// Write the frame with the detection boxes
Mat detectedFrame;
frame.convertTo(detectedFrame, CV_8U);
//video.write(detectedFrame);
imshow(kWinName, frame);
}
cap.release();
//video.release();
}
3.创建CMakeLists.txt文件
cmake_minimum_required(VERSION 2.8)
project( DisplayCamera )
find_package( OpenCV REQUIRED )
add_executable( yolov3 yolov3.cpp )
target_link_libraries(yolov3 ${OpenCV_LIBS})4.运行
修改主函数可以分别实现图片和视频和摄像头。
detect_image图片,detect_video视频,detect_camera相机

./yolov3 4 //4为相机的设备号,realsense用45.结果 ,有点卡无加速