1.准备工作先对相机进行内参标定
%YAML:1.0
---
model_type: KANNALA_BRANDT
camera_name: camera
scaling_ratio: 1
image_width: 640
image_height: 480
projection_parameters:
k2: -0.02059949
k3: -0.00272535
k4: -0.00411149
k5: 0.00134326
mu: 338.79350848
mv: 338.75216467
u0: 334.20126771
v0: 234.73275102
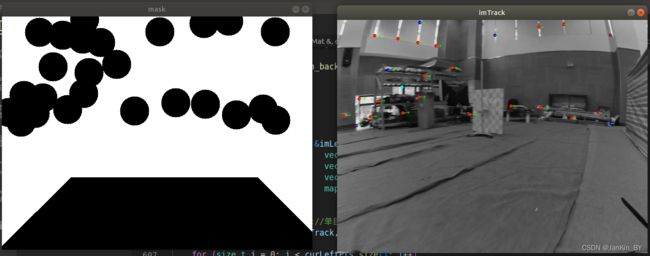
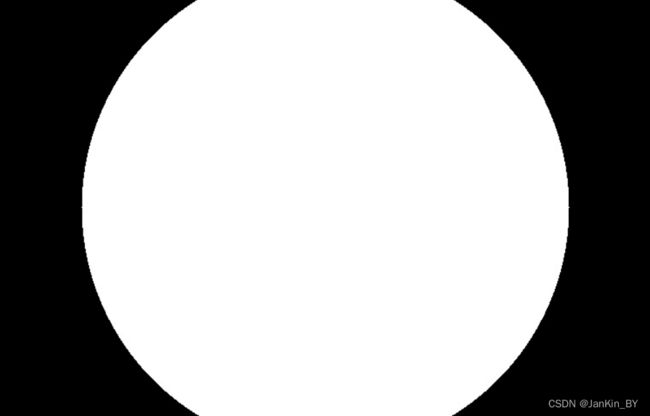
2.添加遮罩
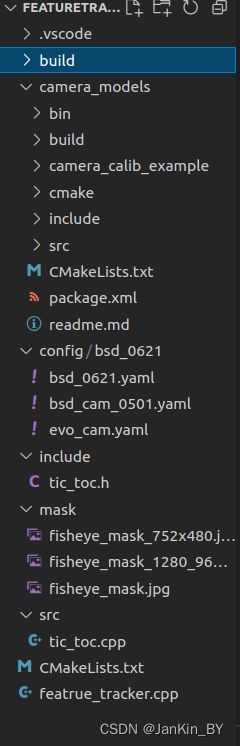
3.下载相机模型文件https://github.com/hengli/camodocal
camera_models
函数
#include
#include
#include
#include
#include
#include
#include
#include