基于Matlab的激光雷达机场地面监控仿真(附源码)
停机坪是机场的一个特定区域,旨在容纳飞机,用于装载或卸载乘客,邮件或货物,加油,停车或维护。机场停机坪通常是高度动态和异构的环境,停机坪人员和车辆彼此靠近运行。由于停机坪的这种性质,它增加了涉及飞机和地勤人员的地勤事故风险。基于激光雷达的停机坪监控系统已被提议作为改善情况图的有效方法,并作为减轻停机坪高风险的措施。
此示例演示如何模拟停机坪交通场景的激光雷达数据,以及如何使用 GGIW-PHD扩展对象追踪器追踪地面交通。
一、设置方案
在此示例中,将模拟飞机进入登机口区域的场景。飞机由三名编组器引导进入其停车位,一个在飞机的两侧,一个在飞机前方。可以模拟飞机停车位附近的地面交通。飞机停放后,地面交通以及编组人员开始向飞机移动。除了进入登机口区域的飞机外,还模拟了已经停在登机口的两架飞机。此示例中使用的方案是使用跟踪方案设计器创建的,并导出到 MATLAB函数以将其与下游功能连接。在 MATLAB 中修改了导出的函数,以指定每个平台的属性并完成到方案结束时间的轨迹。的属性允许定义用于激光雷达模拟的平台的几何图形。在此示例中,将飞机的几何图形指定为“跟踪”。场景中的其他对象使用长方体表示。
要感知场景,请使用单静态激光传感器系统对象的 360 度视场激光雷达传感器。该传感器具有 64 个仰角通道,安装在终端上,距离地面 8 米。传感器的方位角分辨率定义为 0.32 度。在此配置下,传感器每次扫描总共产生 72,000 个点。这组高分辨率数据点通常称为点云。通过指定传感器的 5 Hz,来自传感器的数据在 5 Hz 下进行模拟。
可以在下面的动画中从鸟瞰图以及终端屋顶观察场景和模拟激光雷达数据。点云由彩色点表示,其中颜色随高度从蓝色变为黄色。请注意,激光雷达回车包含来自环境(如地面)的反射。
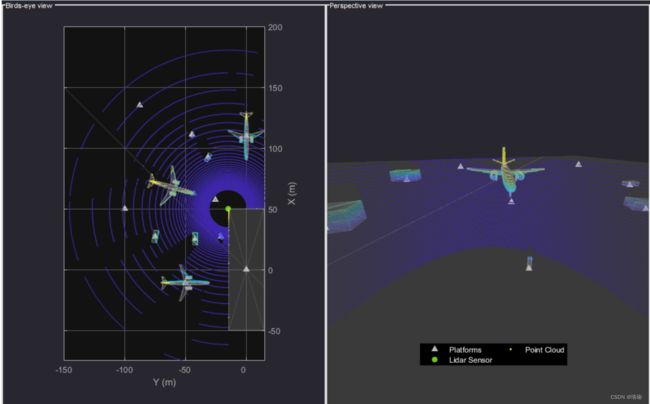
还可以在动画中观察到激光雷达传感器为每个对象返回多个测量值。传统的多目标跟踪器,如跟踪器GNN(GNN)跟踪器,跟踪器JPDA(JPDA)跟踪器假设每个传感器报告每个对象的一个测量值。为了使用传统的跟踪器来使用激光雷达跟踪对象,通常对来自潜在对象的点云进行预处理并聚类成新的测量类型。这些新的测量通常定义对象的位置和尺寸方面,当对象靠得太近时,这种分割激光雷达数据并聚类到边界框的工作流容易出现聚类缺陷。在围裙环境中尤其如此。使用激光雷达数据追踪对象的另一种方法是使用扩展的对象追踪器。与传统的跟踪器相比,扩展的对象跟踪器设计用于跟踪每个传感器产生多个测量值的物体。
二、设置扩展对象跟踪器和性能衡量指标
2.1 扩展对象跟踪器
在此示例中,使用概率假设密度 (PHD) 跟踪器的 GGIW(伽玛高斯逆维萨特)实现。该GGIUS模型使用三个分布来指定目标模型:高斯分布来描述目标运动中心的运动学,例如其位置和速度;逆威萨特 (IW) 分布,用于描述目标的椭圆体范围;一个 Gamma 分布,用于描述来自目标的预期测量值。
扩展对象PHD跟踪器使用分区算法来处理输入测量集。分区算法负责为传感器测量指定多个可能的分割假设。由于分割的总假设数量通常非常大,因此使用了近似技术,如距离分割 (参见分区检测),预测分区和期望最大化(EM)。距离分区算法的工作方式类似于基于距离的聚类分析技术,不同之处在于它会产生多个可能的分区。预测分区和 EM 算法使用来自跟踪器的有关对象的预测来帮助将测量值划分为多个可能的聚类。当对象在空间上彼此靠近时(例如在停机坪环境中),这种使用来自跟踪器的预测的技术至关重要。在此示例中,将使用帮助器类对使用跟踪器中的预测集的测量值进行分区。可以通过利用跟踪器PHD的预测跟踪到时间函数来获得这些预测。
要设置 PHD 跟踪器,请首先使用跟踪传感器配置对象定义传感器的配置。可以使用模拟激光雷达传感器的属性来指定配置的属性。还可以定义一个函数初始化等速 ggiwphd 滤波器。此函数围绕初始化vggiwphd进行包装,并增加目标的伽玛分布和逆维萨特分布的确定性。它还通过指定 ggiwphd 筛选器的属性,将筛选器配置为处理大量检测。接下来,组合此信息并使用系统对象创建扩展对象PHD 跟踪器。
2.2 指标
接下来,使用跟踪类设置 GOSPA 指标计算器,以评估跟踪器的性能。GOSPA 指标旨在通过提供单个成本值来分析跟踪器的性能。成本值越低,跟踪性能越好。要使用 GOSPA 度量,请在轨迹和实线之间定义距离函数。此距离函数计算相互分配轨迹和实况的成本。它还用于表示估计值的本地化或跟踪级精度。在此示例中,轨迹与实线之间的距离是使用距离函数轨迹“真实距离”定义的,该函数包含在下面的支持函数中。当 GGIW-PHD 跟踪器估计几何中心时,自定义距离函数使用平台几何中心的位置来定义位置误差。 可以使用帮助器类来可视化地面实况、模拟数据和估计轨迹。
三、运行方案和跟踪器
接下来,运行方案,模拟来自激光雷达传感器的返回,并使用跟踪器对其进行处理。还可以使用可用的地面实况计算轨道的 GOSPA 指标。此示例假定已对激光雷达数据进行预处理,以从地面和终端等环境中移除激光雷达返回值。因此,将使用有关激光雷达回波的模拟中的可用地面实况信息来移除来自环境的回波。
四、结果
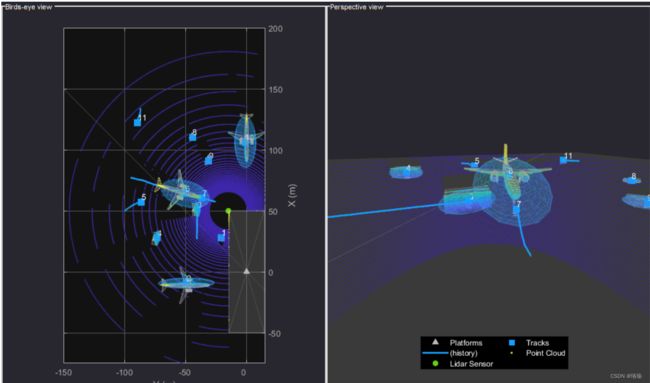
接下来,将使用可视化和定量指标评估每个跟踪器的性能。在下面的动画中,轨迹由蓝色方块表示,这些方块由其标识 注释。物体周围的椭圆体描述了GGIW-PHD滤波器估计的范围。
- 轨道维护
轨道级精度是指估计每个物体的状态(例如其位置,速度和尺寸)的精度。可以观察到,跟踪位于对象的地面实况上。当物体开始移动时,将绘制一个速度矢量,表示速度的方向和大小。请注意,估计的速度与对象运动的方向相同。GGIW-PHD 滤波器假定目标的测量值分布在目标的估计椭圆体范围内。这导致过滤器使用对象的可观察或非遮挡区域来估计对象的大小。请注意,停放的地面车辆上的轨道在其位置上具有朝向可观察侧的偏移。
轨道级别的不准确性也可以使用GOSPA指标的本地化组件进行定量估计。总 GOSPA 指标是其所有组件的组合指标,因此捕获定位准确性、未命中目标和错误轨迹的影响。
五、总结
在此示例中,学习了如何模拟停机坪场景的激光雷达数据,以及如何使用扩展对象 GGIW-PHD 跟踪器对其进行处理。还学习了如何使用 GOSPA 指标及其相关组件评估跟踪器的性能。
六、程序
使用Matlab R2021a版本,点击打开。

打开下面的“AirportApronTrackingExample.mlx”文件,点击运行,就可以看到上述效果。

关注下面公众号,后台回复关键词:激光雷达机场地面监控仿真,发送源码链接。