深度学习之图像分类(十四)--ShuffleNetV2 网络结构
深度学习之图像分类(十四)ShuffleNetV2 网络结构
目录
-
- 深度学习之图像分类(十四)ShuffleNetV2 网络结构
-
- 1. 前言
- 2. Several Practical Guidelines for Efficient Network Architecture Design
-
- 2.1 Equal channel width minimizes memory access cost (MAC).
- 2.2 Excessive group convolution increases MAC.
- 2.3 Network fragmentation reduces degree of parallelism.
- 2.4 Element-wise operations are non-negligible.
- 2.5 总结
- 3. ShuffleNetV2 中的 block
- 4. ShuffleNetV2 网络结构
- 5. 代码
本节学习 ShuffleNetV2 网络结构。学习视频源于 Bilibili,感谢霹雳吧啦Wz,建议大家去看视频学习哦。
1. 前言
ShuffleNetV2 是由国产旷视科技团队在 2018 年提出的,发表在了 ECCV,其原始论文为 ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design。这篇文章非常硬核,实验非常全面。在 ShuffleNetV2 论文中作者提到了,计算复杂度不能只看 FLOPs,为此提出了 4 条设计高效网络的准则,基于准则提出了新的 block 设计。
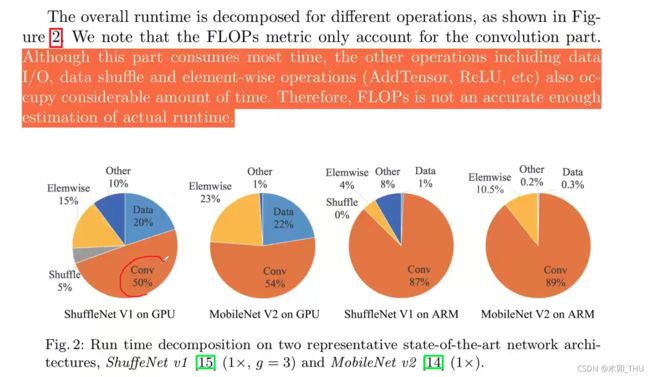
首先看一下论文中给的一些论述,在 MobileNet,ShuffleNetV1 中经常讲的是 FLOPs,其实是衡量模型运算或者复杂度的一个间接的指标,并不是直接的指标。在直接使用过程中我们都是通过 Speed 看推理速度。所以在影响模型推理速度的众多因素中间,我们不能光看 FLOPs,还要考虑其他因素例如内存访问时间成本 MAC (memory access cost)。此外,并行等级 degree of parallelism 也是需要考虑的。相同的 FLOPs 在不同的平台上计算时间也是不同的。
通过下图能发现,我们的卷积还是占据了模型推理的绝大部分时间,但是其他操作例如 data 的 I/O,shuffle 等也占据了相当大的一部分时间。因此 FLOPs 并不能准确评判模型的执行时间。
2. Several Practical Guidelines for Efficient Network Architecture Design
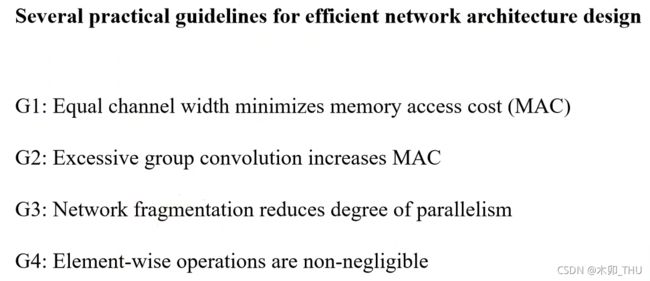
为此作者给出了四条设计高效网络的准则,包括:
- G1: Equal channel width minimizes memory access cost (MAC).
- G2: Excessive group convolution increases MAC.
- G3: Network fragmentation reduces degree of parallelism.
- G4: Element-wise operations are non-negligible.
2.1 Equal channel width minimizes memory access cost (MAC).
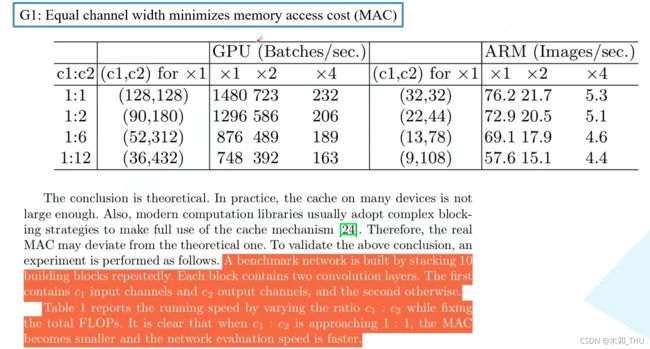
Guideline1 中作者提到,当卷积层输入特征矩阵与输出特征矩阵 channel 相等时,MAC 最小(保持 FLOPs 不变时)。这里主要是针对 1 × 1 1 \times 1 1×1 的卷积层, h w c 1 hwc_1 hwc1 是输入特征矩阵的内存消耗, h w c 2 hwc_2 hwc2 是输出特征矩阵的内存消耗, 1 × 1 × c 1 c 2 1\times1\times c_1 c_2 1×1×c1c2 是卷积核参数的内存消耗。由于我们的条件是 FLOPs 即 B 保持不变,使用均值不等式可以算出如下式子,取等条件是 c 1 = c 2 c_1 = c_2 c1=c2。

基于这个准则作者做了一系列实验,在实验中作者简单堆叠一系列 block(每个 block 两个卷积层,第一个输入通道是 c 1 c_1 c1,输出通道是 c 2 c_2 c2,第二个反过来),在保持 FLOPs 不变的情况下, c 1 : c 2 = 1 : 1 c_1 : c_2 = 1:1 c1:c2=1:1 的时候在 GPU 上能每秒运算 1480 个 Batches,随着 c 1 , c 2 c_1,c_2 c1,c2 比值相差越来越大,推理速度越来越慢。在 ARM 中规律是一样的。
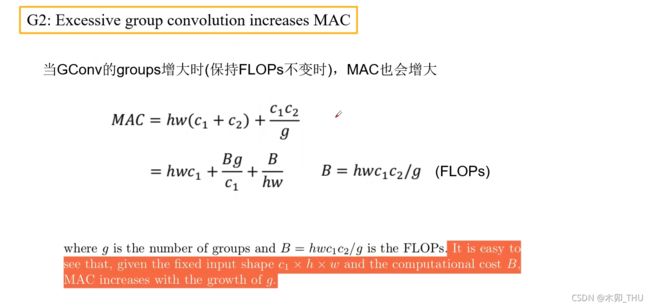
2.2 Excessive group convolution increases MAC.
Guideline2 中作者提到,当 Group Conv 的 groups 增大时,MAC 也会增大(保持 FLOPs 不变时)。对于 Group Conv,这里主要是针对 1 × 1 1 \times 1 1×1 的卷积层, h w c 1 hwc_1 hwc1 是输入特征矩阵的内存消耗, h w c 2 hwc_2 hwc2 是输出特征矩阵的内存消耗, 1 × 1 × ( c 1 / g ) × ( c 2 / g ) × g 1\times1\times (c_1 /g) \times (c_2 / g) \times g 1×1×(c1/g)×(c2/g)×g 是卷积核参数的内存消耗。当固定 FLOPs 即 B 保持不变时,可见 g 增大会造成 MAC 增大。
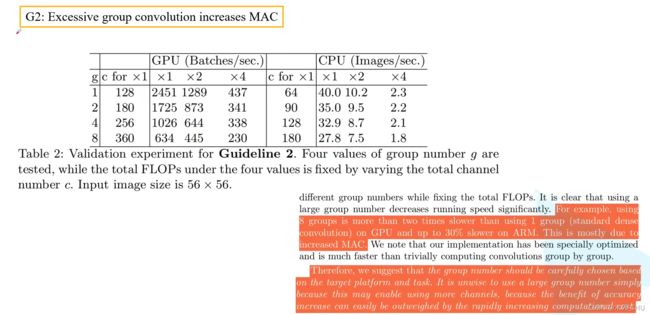
作者针对第二点也进行了一系列实验。保持 FLOPs 不变时,可见随着 g 的增加,GPU 和 CPU 每秒处理的图片数量不断降低。
2.3 Network fragmentation reduces degree of parallelism.
Guideline3 中作者提到,当网络设计的碎片化程度越高时,推理速度越慢。很多论文中设计的网络,分支特别多,例如 Inception,SPP block 等。这里碎片化的程度可以理解为分支的程度。这个分支可以是串联也可以是并联。虽然碎片化的结构可以提升准确率,但是会降低模型的效率。碎片化的结构对于 GPU 这种并行能力强的设备是很不友好的。并且在分支多的情况下还涉及 kernel 的起步和同步的问题。右侧表格的每一行对应于左下角的每一种情况,在 GPU 上符合理论,但是 CPU 上怎么反而还快了一点点,这也说明不同设备在运行相同结构之间的差异。

2.4 Element-wise operations are non-negligible.
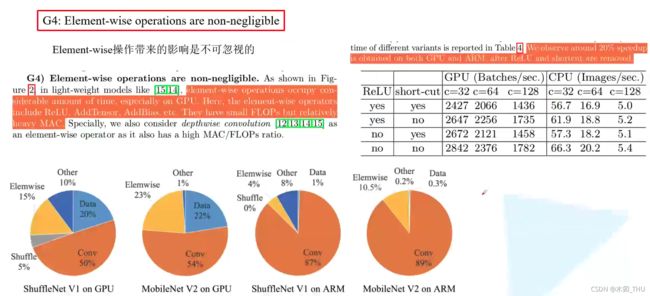
Guideline4 中作者提到,Element-wise 操作带来的影响不可忽视。Element-wise 操作包括激活函数,元素加法 (残差结构),卷积中的 bias。Element-wise 操作的共性是 FLOPs 很小,但是 MAC 很大。此外,DW conv 其实也可以看作是 Element-wise 操作。一系列的实验表明,不采用 short-cut 连接会更快,不采用 ReLU 会比采用 ReLU 快。有人会说,不用肯定会快呀,这里作者想要突出的是,Element-wise 操作比想象中更耗时。作者提到,如果将 short-cut 和 ReLU 都移除会有 20% 的加速。如果只看 FLOPs 的话会认为这些操作并不怎么占用时间。
2.5 总结
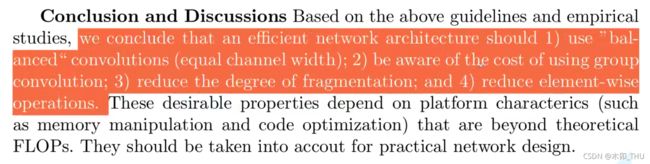
基于上述四条分析,作者提出了总结:
- 使用 “平衡” 的卷积,即尽可能让输出输出 channel 的比值为 1
- 注意 Group Conv 的计算成本,并不能一昧地增大 Group 数量
- 降低网络的碎片成程度
- 尽可能减少 Element-wise 操作
3. ShuffleNetV2 中的 block
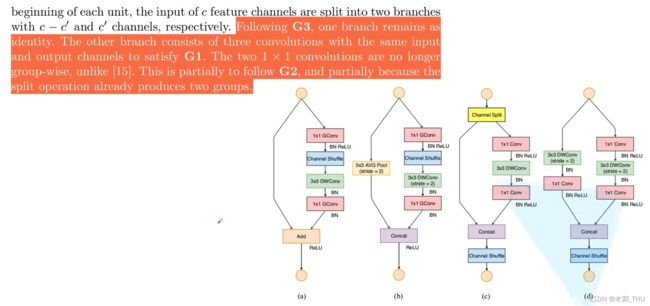
下图中左边的 a 和 b 分别对应 ShuffleNetV1 中 stride = 1 和 stride = 2 的情况,右边的 c 和 d 分别对应 ShuffleNetV2 中 stride = 1 和 stride = 2 的情况。
针对 c 类型的 block,首先对于每个 block 单元,将输入特征矩阵的通道 c 拆分为两个分支 c - c‘ 和 c’,即对应着 channel split。作者在论文中说了 c ′ = c / 2 c' = c/2 c′=c/2。针对 G3,我们减少碎片化程度,所以在左边分支不做事情,右边的分支三个卷积输入输出通道数都是一样的,满足了 G1。两个 1 × 1 1 \times 1 1×1 卷积不再使用 Group conv,这也是为了满足 G2。 在卷积之后,两个分支是通过 Concat 进行通道拼接,这也就使得 block 前后通道数保持不变,也满足 G1。然后在 block 中后进行 channel shuffle。在 © 中不再有 Add 操作,ReLU 和 DW Conv 也只在一个分支中存在(a 中 Add 之后的 ReLU 放到了 c 中最后一个 1 × 1 1 \times 1 1×1 卷积之后,处理的元素数目少了一半),尽可能减少了Element-wise 操作。然后最后的 Concat,Channel Shuffle 以及接下来的 Channel Split 其实可以合并为一次 Element-wise 操作,变相减少了 Element-wise 操作,符合 G4。
针对 d 类型的 block,即下采样的情况,就没有了 channel split 操作,最后 Concat 之后输出特征矩阵的 channel 就翻倍了。并且将 b 中一个分支的 3 × 3 3 \times 3 3×3 平均池化变为了 3 × 3 3 \times 3 3×3 的 DW conv,本来平均池化就是分通道做的,并且可以看成是权重全是 1/9 的 DW Conv,这里换为了 DW Conv 增加了更多的可能。然后再新增了一个 1 × 1 1 \times 1 1×1 卷积。
注意 DW 卷积之后是只有 BN 没有 ReLU 的哟。
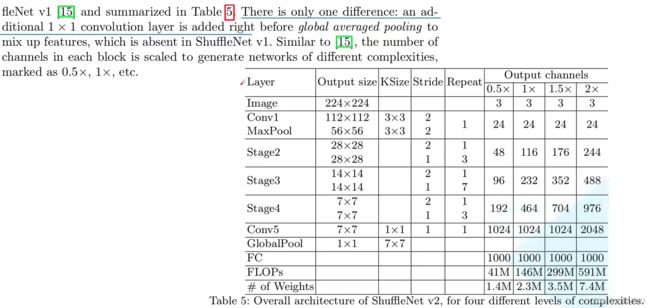
4. ShuffleNetV2 网络结构
ShuffleNetV2 和 ShuffleNetV1 框架基本都是一样的,唯一的不同在于多了一个 Conv5 这个 1 × 1 1 \times 1 1×1 卷积层。对于每个 stage 的第一个 block,stride 都是 2 ,输出 channel 是需要进行翻倍的。此外对于 stage2 的第一个 block,他的两个分支中输出的 channel 并不等于输入的 channel,而是直接设置为指定输出 channel 的一半,比如对于 1x 版本,每个分支的 channel 应该是 58 而不是 24。
为什么要加 Conv5 呢?知乎上看到一个狗头回答 :
为什么要加conv5呢?猜,不加准确率保证不了,不然比起v1版本减去那么多的 groups,速度是上去了准确率是万万不能下去的,怎么办呢?再加一层卷积试试吧。
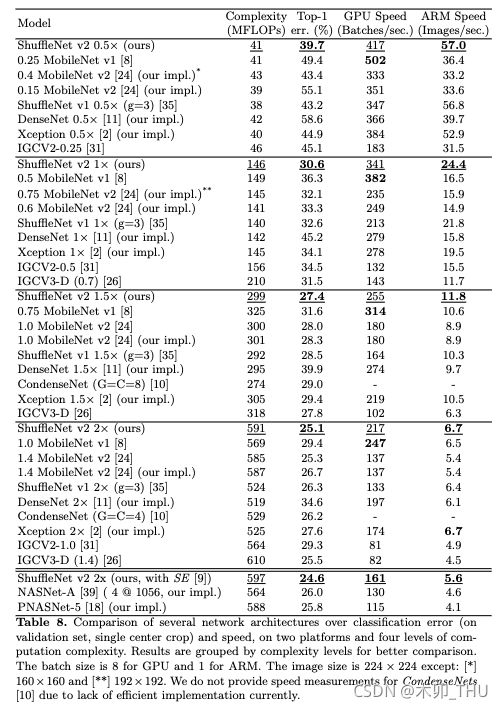
最后看一下 ShuffleNetV2 的性能指标,大家的 FLOPs 差不多,但是 ShuffleNetV2 的正确率和速度都很不错啊:
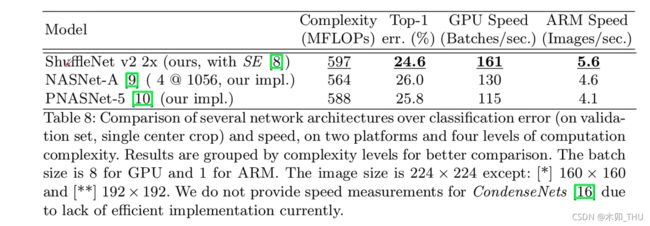
其实 ShuffleNetV2 还可以搭配 SE 注意力模块,作者在论文中给出了实验结果,其正确率和速度都是最优的:
5. 代码
ShuffleNetV2 实现代码如下所示,代码出处:
from typing import List, Callable
import torch
from torch import Tensor
import torch.nn as nn
def channel_shuffle(x: Tensor, groups: int) -> Tensor:
batch_size, num_channels, height, width = x.size()
channels_per_group = num_channels // groups
# reshape
# [batch_size, num_channels, height, width] -> [batch_size, groups, channels_per_group, height, width]
x = x.view(batch_size, groups, channels_per_group, height, width)
x = torch.transpose(x, 1, 2).contiguous()
# flatten
x = x.view(batch_size, -1, height, width)
return x
class InvertedResidual(nn.Module):
def __init__(self, input_c: int, output_c: int, stride: int):
super(InvertedResidual, self).__init__()
if stride not in [1, 2]:
raise ValueError("illegal stride value.")
self.stride = stride
assert output_c % 2 == 0
branch_features = output_c // 2
# 当stride为1时,input_channel应该是branch_features的两倍
# python中 '<<' 是位运算,可理解为计算×2的快速方法
assert (self.stride != 1) or (input_c == branch_features << 1)
if self.stride == 2:
self.branch1 = nn.Sequential(
self.depthwise_conv(input_c, input_c, kernel_s=3, stride=self.stride, padding=1),
nn.BatchNorm2d(input_c),
nn.Conv2d(input_c, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True)
)
else:
self.branch1 = nn.Sequential()
self.branch2 = nn.Sequential(
nn.Conv2d(input_c if self.stride > 1 else branch_features, branch_features, kernel_size=1,
stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True),
self.depthwise_conv(branch_features, branch_features, kernel_s=3, stride=self.stride, padding=1),
nn.BatchNorm2d(branch_features),
nn.Conv2d(branch_features, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True)
)
@staticmethod
def depthwise_conv(input_c: int,
output_c: int,
kernel_s: int,
stride: int = 1,
padding: int = 0,
bias: bool = False) -> nn.Conv2d:
return nn.Conv2d(in_channels=input_c, out_channels=output_c, kernel_size=kernel_s,
stride=stride, padding=padding, bias=bias, groups=input_c)
def forward(self, x: Tensor) -> Tensor:
if self.stride == 1:
x1, x2 = x.chunk(2, dim=1)
out = torch.cat((x1, self.branch2(x2)), dim=1)
else:
out = torch.cat((self.branch1(x), self.branch2(x)), dim=1)
out = channel_shuffle(out, 2)
return out
class ShuffleNetV2(nn.Module):
def __init__(self,
stages_repeats: List[int],
stages_out_channels: List[int],
num_classes: int = 1000,
inverted_residual: Callable[..., nn.Module] = InvertedResidual):
super(ShuffleNetV2, self).__init__()
if len(stages_repeats) != 3:
raise ValueError("expected stages_repeats as list of 3 positive ints")
if len(stages_out_channels) != 5:
raise ValueError("expected stages_out_channels as list of 5 positive ints")
self._stage_out_channels = stages_out_channels
# input RGB image
input_channels = 3
output_channels = self._stage_out_channels[0]
self.conv1 = nn.Sequential(
nn.Conv2d(input_channels, output_channels, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(output_channels),
nn.ReLU(inplace=True)
)
input_channels = output_channels
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
# Static annotations for mypy
self.stage2: nn.Sequential
self.stage3: nn.Sequential
self.stage4: nn.Sequential
stage_names = ["stage{}".format(i) for i in [2, 3, 4]]
for name, repeats, output_channels in zip(stage_names, stages_repeats,
self._stage_out_channels[1:]):
seq = [inverted_residual(input_channels, output_channels, 2)]
for i in range(repeats - 1):
seq.append(inverted_residual(output_channels, output_channels, 1))
setattr(self, name, nn.Sequential(*seq))
input_channels = output_channels
output_channels = self._stage_out_channels[-1]
self.conv5 = nn.Sequential(
nn.Conv2d(input_channels, output_channels, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(output_channels),
nn.ReLU(inplace=True)
)
self.fc = nn.Linear(output_channels, num_classes)
def _forward_impl(self, x: Tensor) -> Tensor:
# See note [TorchScript super()]
x = self.conv1(x)
x = self.maxpool(x)
x = self.stage2(x)
x = self.stage3(x)
x = self.stage4(x)
x = self.conv5(x)
x = x.mean([2, 3]) # global pool
x = self.fc(x)
return x
def forward(self, x: Tensor) -> Tensor:
return self._forward_impl(x)
def shufflenet_v2_x1_0(num_classes=1000):
"""
Constructs a ShuffleNetV2 with 1.0x output channels, as described in
`"ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design"
`.
weight: https://download.pytorch.org/models/shufflenetv2_x1-5666bf0f80.pth
:param num_classes:
:return:
"""
model = ShuffleNetV2(stages_repeats=[4, 8, 4],
stages_out_channels=[24, 116, 232, 464, 1024],
num_classes=num_classes)
return model
def shufflenet_v2_x0_5(num_classes=1000):
"""
Constructs a ShuffleNetV2 with 0.5x output channels, as described in
`"ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design"
`.
weight: https://download.pytorch.org/models/shufflenetv2_x0.5-f707e7126e.pth
:param num_classes:
:return:
"""
model = ShuffleNetV2(stages_repeats=[4, 8, 4],
stages_out_channels=[24, 48, 96, 192, 1024],
num_classes=num_classes)
return model