【TensorRT】在Jetson设备Xavier(TX2等通用)上使用TensorRT加速yolov5,详细记录过程
硬件:Xavier
jetpack版本:sudo apt-cache show nvidia-jetpack
一、克隆代码:
1、第一个代码是yolov5的官方代码:
https://github.com/ultralytics/yolov5.git
2、第二个代码是TensorRT编译yolov5的代码:
git clone https://github.com/wang-xinyu/tensorrtx.git

其中tensorrtx文件夹我只保留了yolov5文件夹,如图:

下载yolov5s.pt(官方提供的,注意版本不能错)这里我将我使用的上传到百度网盘,需要自取:链接: https://pan.baidu.com/s/1LwOJ56f6-faUlIl0fsDCng?pwd=b3h9 提取码: b3h9 复制这段内容后打开百度网盘手机App,操作更方便哦
二、模型转换(将yolotest.pt也就是yolov5s.pt转换成yolov5s.wts)
环境说明:
(1)Xavier上需创建完成yolov5所需要的库环境(其中比较难装的torch和tarchision见我另外的博客)
(2)如果不想在xavier上转换,可以在pc机转换
转换模型文件:
注意:yolov5官方仓库已经提供了转换代码gen_wts.py
步骤一:将下载的yolotest.pt拷贝到yolov5目录下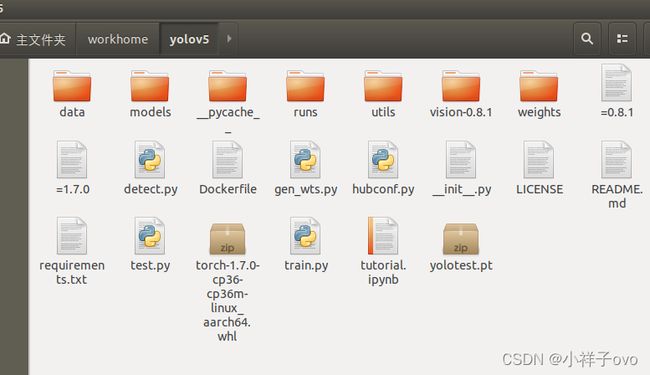
步骤二:打开终端,进入yolov5目录下,启动虚拟环境
cd yolov5
conda activate yolov5 #启动虚拟环境
步骤三:执行gen_wts.py程序,生成转换文件
python gen_wts.py -w yolotest.pt -o yolov5s.wts

三、编译引擎文件
步骤一:在tensortrtx/yolov5/目录下新建build文件夹
cd work/tensorrtx/yolov5 #你自己的目录
mkdir bulid
将上一步生成的yolov5.wts拷贝到build文件夹下
然后cmake 、make
cmake ..
make


以上两部顺利编译的基础是opencv库等都已经配置好的,我使用的是jetpack4.5,这些库已经是系统配置好的,不需要再装。我在加速别的模型时,需要使用一些cuda编译的cv库,这时就需要将默认的库卸载,重新编译opencv了,在本文中,不需要重新编译opencv,我说这些就是描述一下我遇到的一些问题,给大家一个参考。
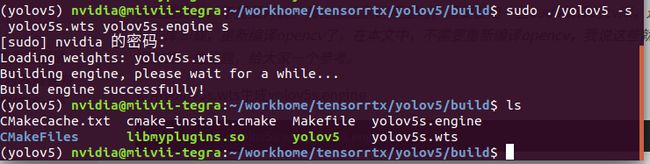
使用yolov5s.wts生成yolov5s.engine
sudo ./yolov5 -s yolov5s.wts yolov5s.engine s
四、测试
一些bug:
jetson xavier在使用tensorRT对yolov5加速时,报错ModuleNotFoundError: No module named ‘pycuda‘
jetson xavier在使用tensorRT对yolov5加速时,报错ModuleNotFoundError: No module named ‘tensorrt‘
其中pycuda可以直接pip install 安装
tensorrt解决参见链接
./yolov5 -d yolov5s.engine ../test/

可见推理一张图片的时间30ms左右。
五、提供一个python测试代码,调用摄像头的。
感谢:https://blog.csdn.net/qq_40691868/article/details/117331162?spm=1001.2014.3001.5506
我在这个代码基础上增加了FPS显示,我的是外接摄像头,注意修改摄像头编号
"""
An example that uses TensorRT's Python api to make inferences.
"""
import ctypes
import os
import shutil
import random
import sys
import threading
import time
import cv2
import numpy as np
import pycuda.autoinit
import pycuda.driver as cuda
import tensorrt as trt
import torch
import torchvision
import argparse
CONF_THRESH = 0.5
IOU_THRESHOLD = 0.4
def get_img_path_batches(batch_size, img_dir):
ret = []
batch = []
for root, dirs, files in os.walk(img_dir):
for name in files:
if len(batch) == batch_size:
ret.append(batch)
batch = []
batch.append(os.path.join(root, name))
if len(batch) > 0:
ret.append(batch)
return ret
def plot_one_box(x, img, color=None, label=None, line_thickness=None):
"""
description: Plots one bounding box on image img,
this function comes from YoLov5 project.
param:
x: a box likes [x1,y1,x2,y2]
img: a opencv image object
color: color to draw rectangle, such as (0,255,0)
label: str
line_thickness: int
return:
no return
"""
tl = (
line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1
) # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(
img,
label,
(c1[0], c1[1] - 2),
0,
tl / 3,
[225, 255, 255],
thickness=tf,
lineType=cv2.LINE_AA,
)
class YoLov5TRT(object):
"""
description: A YOLOv5 class that warps TensorRT ops, preprocess and postprocess ops.
"""
def __init__(self, engine_file_path):
# Create a Context on this device,
self.ctx = cuda.Device(0).make_context()
stream = cuda.Stream()
TRT_LOGGER = trt.Logger(trt.Logger.INFO)
runtime = trt.Runtime(TRT_LOGGER)
# Deserialize the engine from file
with open(engine_file_path, "rb") as f:
engine = runtime.deserialize_cuda_engine(f.read())
context = engine.create_execution_context()
host_inputs = []
cuda_inputs = []
host_outputs = []
cuda_outputs = []
bindings = []
for binding in engine:
print('bingding:', binding, engine.get_binding_shape(binding))
size = trt.volume(engine.get_binding_shape(binding)) * engine.max_batch_size
dtype = trt.nptype(engine.get_binding_dtype(binding))
# Allocate host and device buffers
host_mem = cuda.pagelocked_empty(size, dtype)
cuda_mem = cuda.mem_alloc(host_mem.nbytes)
# Append the device buffer to device bindings.
bindings.append(int(cuda_mem))
# Append to the appropriate list.
if engine.binding_is_input(binding):
self.input_w = engine.get_binding_shape(binding)[-1]
self.input_h = engine.get_binding_shape(binding)[-2]
host_inputs.append(host_mem)
cuda_inputs.append(cuda_mem)
else:
host_outputs.append(host_mem)
cuda_outputs.append(cuda_mem)
# Store
self.stream = stream
self.context = context
self.engine = engine
self.host_inputs = host_inputs
self.cuda_inputs = cuda_inputs
self.host_outputs = host_outputs
self.cuda_outputs = cuda_outputs
self.bindings = bindings
self.batch_size = engine.max_batch_size
def infer(self, input_image_path):
threading.Thread.__init__(self)
# Make self the active context, pushing it on top of the context stack.
self.ctx.push()
self.input_image_path = input_image_path
# Restore
stream = self.stream
context = self.context
engine = self.engine
host_inputs = self.host_inputs
cuda_inputs = self.cuda_inputs
host_outputs = self.host_outputs
cuda_outputs = self.cuda_outputs
bindings = self.bindings
# Do image preprocess
batch_image_raw = []
batch_origin_h = []
batch_origin_w = []
batch_input_image = np.empty(shape=[self.batch_size, 3, self.input_h, self.input_w])
input_image, image_raw, origin_h, origin_w = self.preprocess_image(input_image_path
)
batch_origin_h.append(origin_h)
batch_origin_w.append(origin_w)
np.copyto(batch_input_image, input_image)
batch_input_image = np.ascontiguousarray(batch_input_image)
# Copy input image to host buffer
np.copyto(host_inputs[0], batch_input_image.ravel())
start = time.time()
# Transfer input data to the GPU.
cuda.memcpy_htod_async(cuda_inputs[0], host_inputs[0], stream)
# Run inference.
context.execute_async(batch_size=self.batch_size, bindings=bindings, stream_handle=stream.handle)
# Transfer predictions back from the GPU.
cuda.memcpy_dtoh_async(host_outputs[0], cuda_outputs[0], stream)
# Synchronize the stream
stream.synchronize()
end = time.time()
# Remove any context from the top of the context stack, deactivating it.
self.ctx.pop()
# Here we use the first row of output in that batch_size = 1
output = host_outputs[0]
# Do postprocess
result_boxes, result_scores, result_classid = self.post_process(
output, origin_h, origin_w)
# Draw rectangles and labels on the original image
for j in range(len(result_boxes)):
box = result_boxes[j]
plot_one_box(
box,
image_raw,
label="{}:{:.2f}".format(
categories[int(result_classid[j])], result_scores[j]
),
)
return image_raw, end - start
def destroy(self):
# Remove any context from the top of the context stack, deactivating it.
self.ctx.pop()
def get_raw_image(self, image_path_batch):
"""
description: Read an image from image path
"""
for img_path in image_path_batch:
yield cv2.imread(img_path)
def get_raw_image_zeros(self, image_path_batch=None):
"""
description: Ready data for warmup
"""
for _ in range(self.batch_size):
yield np.zeros([self.input_h, self.input_w, 3], dtype=np.uint8)
def preprocess_image(self, input_image_path):
"""
description: Convert BGR image to RGB,
resize and pad it to target size, normalize to [0,1],
transform to NCHW format.
param:
input_image_path: str, image path
return:
image: the processed image
image_raw: the original image
h: original height
w: original width
"""
image_raw = input_image_path
h, w, c = image_raw.shape
image = cv2.cvtColor(image_raw, cv2.COLOR_BGR2RGB)
# Calculate widht and height and paddings
r_w = self.input_w / w
r_h = self.input_h / h
if r_h > r_w:
tw = self.input_w
th = int(r_w * h)
tx1 = tx2 = 0
ty1 = int((self.input_h - th) / 2)
ty2 = self.input_h - th - ty1
else:
tw = int(r_h * w)
th = self.input_h
tx1 = int((self.input_w - tw) / 2)
tx2 = self.input_w - tw - tx1
ty1 = ty2 = 0
# Resize the image with long side while maintaining ratio
image = cv2.resize(image, (tw, th))
# Pad the short side with (128,128,128)
image = cv2.copyMakeBorder(
image, ty1, ty2, tx1, tx2, cv2.BORDER_CONSTANT, (128, 128, 128)
)
image = image.astype(np.float32)
# Normalize to [0,1]
image /= 255.0
# HWC to CHW format:
image = np.transpose(image, [2, 0, 1])
# CHW to NCHW format
image = np.expand_dims(image, axis=0)
# Convert the image to row-major order, also known as "C order":
image = np.ascontiguousarray(image)
return image, image_raw, h, w
def xywh2xyxy(self, origin_h, origin_w, x):
"""
description: Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
param:
origin_h: height of original image
origin_w: width of original image
x: A boxes tensor, each row is a box [center_x, center_y, w, h]
return:
y: A boxes tensor, each row is a box [x1, y1, x2, y2]
"""
y = torch.zeros_like(x) if isinstance(x, torch.Tensor) else np.zeros_like(x)
r_w = self.input_w / origin_w
r_h = self.input_h / origin_h
if r_h > r_w:
y[:, 0] = x[:, 0] - x[:, 2] / 2
y[:, 2] = x[:, 0] + x[:, 2] / 2
y[:, 1] = x[:, 1] - x[:, 3] / 2 - (self.input_h - r_w * origin_h) / 2
y[:, 3] = x[:, 1] + x[:, 3] / 2 - (self.input_h - r_w * origin_h) / 2
y /= r_w
else:
y[:, 0] = x[:, 0] - x[:, 2] / 2 - (self.input_w - r_h * origin_w) / 2
y[:, 2] = x[:, 0] + x[:, 2] / 2 - (self.input_w - r_h * origin_w) / 2
y[:, 1] = x[:, 1] - x[:, 3] / 2
y[:, 3] = x[:, 1] + x[:, 3] / 2
y /= r_h
return y
def post_process(self, output, origin_h, origin_w):
"""
description: postprocess the prediction
param:
output: A tensor likes [num_boxes,cx,cy,w,h,conf,cls_id, cx,cy,w,h,conf,cls_id, ...]
origin_h: height of original image
origin_w: width of original image
return:
result_boxes: finally boxes, a boxes tensor, each row is a box [x1, y1, x2, y2]
result_scores: finally scores, a tensor, each element is the score correspoing to box
result_classid: finally classid, a tensor, each element is the classid correspoing to box
"""
# Get the num of boxes detected
num = int(output[0])
# Reshape to a two dimentional ndarray
pred = np.reshape(output[1:], (-1, 6))[:num, :]
# to a torch Tensor
pred = torch.Tensor(pred).cuda()
# Get the boxes
boxes = pred[:, :4]
# Get the scores
scores = pred[:, 4]
# Get the classid
classid = pred[:, 5]
# Choose those boxes that score > CONF_THRESH
si = scores > CONF_THRESH
boxes = boxes[si, :]
scores = scores[si]
classid = classid[si]
# Trandform bbox from [center_x, center_y, w, h] to [x1, y1, x2, y2]
boxes = self.xywh2xyxy(origin_h, origin_w, boxes)
# Do nms
indices = torchvision.ops.nms(boxes, scores, iou_threshold=IOU_THRESHOLD).cpu()
result_boxes = boxes[indices, :].cpu()
result_scores = scores[indices].cpu()
result_classid = classid[indices].cpu()
return result_boxes, result_scores, result_classid
class inferThread(threading.Thread):
def __init__(self, yolov5_wrapper):
threading.Thread.__init__(self)
self.yolov5_wrapper = yolov5_wrapper
def infer(self, frame):
batch_image_raw, use_time = self.yolov5_wrapper.infer(frame)
# for i, img_path in enumerate(self.image_path_batch):
# parent, filename = os.path.split(img_path)
# save_name = os.path.join('output', filename)
# # Save image
# cv2.imwrite(save_name, batch_image_raw[i])
# print('input->{}, time->{:.2f}ms, saving into output/'.format(self.image_path_batch, use_time * 1000))
return batch_image_raw, use_time
class warmUpThread(threading.Thread):
def __init__(self, yolov5_wrapper):
threading.Thread.__init__(self)
self.yolov5_wrapper = yolov5_wrapper
def run(self):
batch_image_raw, use_time = self.yolov5_wrapper.infer(self.yolov5_wrapper.get_raw_image_zeros())
print('warm_up->{}, time->{:.2f}ms'.format(batch_image_raw[0].shape, use_time * 1000))
if __name__ == "__main__":
# load custom plugins
parser = argparse.ArgumentParser()
parser.add_argument('--engine', nargs='+', type=str, default="build/yolov5s.engine", help='.engine path(s)')
parser.add_argument('--save', type=int, default=0, help='save?')
opt = parser.parse_args()
PLUGIN_LIBRARY = "build/libmyplugins.so"
engine_file_path = opt.engine
ctypes.CDLL(PLUGIN_LIBRARY)
# load coco labels
categories = ["person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat",
"traffic light",
"fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
"elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase",
"frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard",
"surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
"sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
"potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard",
"cell phone",
"microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors",
"teddy bear",
"hair drier", "toothbrush"]
# a YoLov5TRT instance
yolov5_wrapper = YoLov5TRT(engine_file_path)
cap = cv2.VideoCapture(2)
try:
thread1 = inferThread(yolov5_wrapper)
thread1.start()
thread1.join()
while 1:
_, frame = cap.read()
img, t = thread1.infer(frame)
fps = 1/t
imgout = cv2.putText(img, "FPS= %.2f" % (fps), (0, 40), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("result", imgout)
if cv2.waitKey(1) & 0XFF == ord('q'): # 1 millisecond
break
finally:
# destroy the instance
cap.release()
cv2.destroyAllWindows()
yolov5_wrapper.destroy()