python-opencv 图像处理基础 (九)图像梯度+边缘检测+直线检测+圆检测+轮廓检测+对象测量
一阶导数与sobel算子
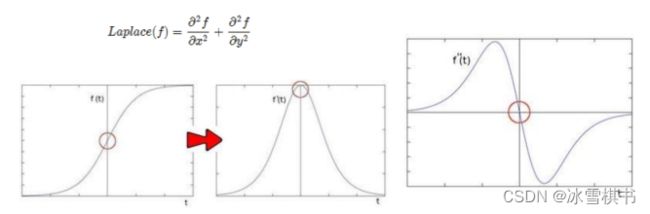
二阶导数与拉普拉斯算子
其它边缘算子—边缘检测、直线检测
一阶导数与sobel算子


二阶导数和拉普拉斯算子
在二阶导数的时候,最大变化处的值为0即边缘是零值。通过二阶导数计算,依据此理论可以计算图像二阶导数,提取边缘。

import cv2 as cv
import numpy as np
def lapalian_demo(image):
#第一种方法调用算子
#dst = cv.Laplacian(image, cv.CV_32F)
#lpls = cv.convertScaleAbs(dst)
#第二种方法手动实现
kernel = np.array([[1, 1, 1], [1, -8, 1], [1, 1, 1]])#定义卷积核 8邻域 还可以4邻域
dst = cv.filter2D(image, cv.CV_32F, kernel=kernel)
lpls = cv.convertScaleAbs(dst)
cv.imshow("lapalian_demo", lpls)
def sobel_demo(image):
# grad_x = cv.Sobel(image, cv.CV_32F, 1, 0)#32位float浮点数 不能使用8u 加加减减超256了。
# grad_y = cv.Sobel(image, cv.CV_32F, 0, 1)
grad_x = cv.Scharr(image, cv.CV_32F, 1, 0) #Scharr边缘增强,对弱边缘梯度提取效果好
grad_y = cv.Scharr(image, cv.CV_32F, 0, 1)
gradx = cv.convertScaleAbs(grad_x)
grady = cv.convertScaleAbs(grad_y)
cv.imshow("gradient-x", gradx)
cv.imshow("gradient-y", grady)
gradxy = cv.addWeighted(gradx, 0.5, grady, 0.5, 0)
cv.imshow("gradient", gradxy)
if __name__=='__main__':
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("../opencv-python-img/lena.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
#sobel_demo(src)
lapalian_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
sobel_demo的result显示:
上下和左右的差异
x和y方向最终结果很好的反应了像素梯度变化差异
scharr 进行边缘增强后的梯度提取,提取弱边缘 ,噪声敏感,需要降噪
拉普拉斯的结果输出:
直接调用算子的结果:
手动卷积实现的结果
其它边缘提取算子
canny边缘提取
canny:边缘检测算法,1986年提出的。
是一个很好的边缘检测器
很常用也很实用的图像处理方法
步骤:
高斯模糊--GaussianBlur 为什么:因为canny对边缘噪声敏感
灰度转换--CVTColor
计算梯度--sobel/scharr
非最大信号抑制
高低阈值输出二值图像
import cv2 as cv
import numpy as np
def edge_demo(image):
blurred = cv.GaussianBlur(image, (3, 3), 0)
gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY)
# X Gradient
xgrad = cv.Sobel(gray, cv.CV_16SC1, 1, 0)
# Y Gradient
ygrad = cv.Sobel(gray, cv.CV_16SC1, 0, 1)
#edge
#edge_output = cv.Canny(xgrad, ygrad, 50, 150)
edge_output = cv.Canny(gray, 50, 150)
cv.imshow("Canny Edge", edge_output)
dst = cv.bitwise_and(image, image, mask=edge_output)
cv.imshow("Color Edge", dst)
if __name__=='__main__':
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("../opencv-python-img/lena.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
edge_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
使用sobel的x和y梯度提取边缘
使用灰度图提取canny边缘:
霍夫直线检测
Hough Line Transform 用来做直线检测
前提条件:边缘检测已经完成
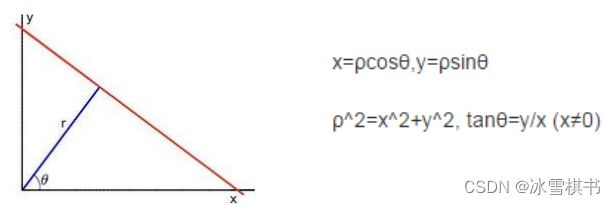
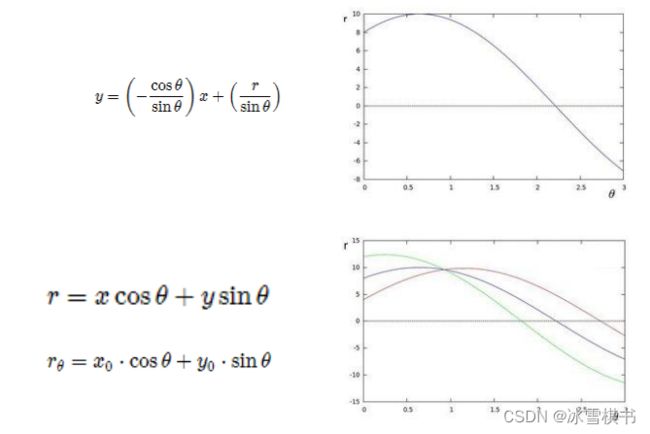
平面空间到极坐标空间转换
import cv2 as cv
import numpy as np
def line_detection(image):
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray, 50, 150, apertureSize=3)#做梯度窗口的大小是3.
lines = cv.HoughLines(edges, 1, np.pi/180, 200) #1是半径步长,np.pi/180每次偏转1度,
for line in lines:
print(type(lines))
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0+1000*(-b))
y1 = int(y0+1000*(a))
x2 = int(x0-1000*(-b))
y2 = int(y0-1000*(a))
cv.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv.imshow("image-lines", image)
def line_detect_possible_demo(image):
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray, 50, 150, apertureSize=3)
lines = cv.HoughLinesP(edges, 1, np.pi/180, 100, minLineLength=50, maxLineGap=10)#常用这个API,会告诉我们线段的开始点和终止点
for line in lines:
print(type(line))
x1, y1, x2, y2 = line[0]
cv.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv.imshow("line_detect_possible_demo", image)
if __name__=='__main__':
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("../opencv-python-img/test.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
line_detect_possible_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
使用HoughLines函数的结果显示:
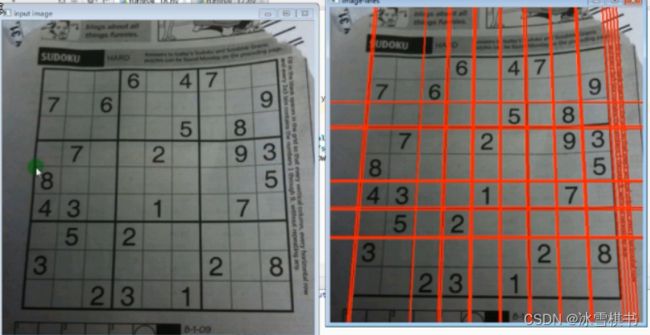
使用HoughLinesP 函数的结果显示:这个API常用。

霍夫圆检测

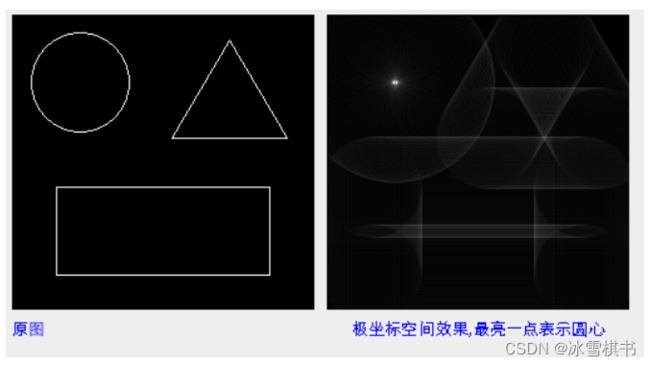

因为霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波。
基于效率考虑,Opencv中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步:
- 检测边缘,发现可能的圆心
- 基于第一步的基础上从候选圆心开始计算最佳半径大小
import cv2 as cv
import numpy as np
def detect_circles_demo(image):
dst = cv.pyrMeanShiftFiltering(image, 10, 100)#基于边缘保留的滤波
cimage = cv.cvtColor(dst, cv.COLOR_BGR2GRAY)
circles = cv.HoughCircles(cimage, cv.HOUGH_GRADIENT, 1, 20, param1=50, param2=30, minRadius=0, maxRadius=0)
circles = np.uint16(np.around(circles))#整数
for i in circles[0, :]:
cv.circle(image, (i[0], i[1]), i[2], (0, 0, 255), 2)#图像,中心点位置,半径,颜色,线宽
cv.circle(image, (i[0], i[1]), 2, (255, 0, 0), 2)#圆心
cv.imshow("circles", image)
if __name__=='__main__':
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("../opencv-python-img/coins.jpg")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
detect_circles_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
代码结果显示:

霍夫圆检测的实例
钢管检测:个人总结
轮廓检测
轮廓发现
是基于图像边缘提取的基础寻找对象轮廓的方法。
所以边缘提取的阈值选定会影响最终轮廓发现结果
API介绍
-findContours发现轮廓
-drawContours绘制轮廓
API利用梯度来避免阈值烦恼
原图直接找轮廓有噪点:

高斯模糊去噪点dst = cv.GaussianBlur(image, (3, 3), 0):

cv.RETR_TREE 内外轮廓都找(cv2.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE))
 cv.RETR_EXTERNAL找外轮廓cv2.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
cv.RETR_EXTERNAL找外轮廓cv2.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)

填充轮廓cv.drawContours(image, contours, i, (0, 0, 255), -1)
 通过canny 获取轮廓:不是想要的结果,根据情况选择,这种硬币的轮廓提取使用二值化提取。
通过canny 获取轮廓:不是想要的结果,根据情况选择,这种硬币的轮廓提取使用二值化提取。
以下示例使用canny获取轮廓效果好:适当调整canny的参数

import cv2 as cv
import numpy as np
def edge_demo(image):
blurred = cv.GaussianBlur(image, (3, 3), 0)
gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY)
# X Gradient
xgrad = cv.Sobel(gray, cv.CV_16SC1, 1, 0)
# Y Gradient
ygrad = cv.Sobel(gray, cv.CV_16SC1, 0, 1)
#edge
#edge_output = cv.Canny(xgrad, ygrad, 50, 150)
edge_output = cv.Canny(gray, 50, 150)
cv.imshow("Canny Edge", edge_output)
return edge_output
def contours_demo(image):
#第一种方法获取二值图像
#dst = cv.GaussianBlur(image, (3, 3), 0)#去除噪点
#gray = cv.cvtColor(dst, cv.COLOR_BGR2GRAY)
#ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
#cv.imshow("binary image", binary)
#第二种方法通过canny 获取二值图像
binary = edge_demo(image)
#cloneImage, contours, heriachy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
#contours, heriachy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)#内外的轮廓都找
contours, heriachy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)#找外面的轮廓
for i, contour in enumerate(contours):
#cv.drawContours(image, contours, i, (0, 0, 255), 2)#
cv.drawContours(image, contours, i, (0, 0, 255), -1)#轮廓填充
print(i)
cv.imshow("detect contours", image)
if __name__=='__main__':
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("../opencv-python-img/coins.jpg")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
contours_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
对象测量
- 弧长与面积
轮廓发现
计算每个轮廓的弧长和面积,像素单位 - 多边形拟合
- 几何矩计算
import cv2 as cv
import numpy as np
#轮廓分析 计算轮廓面积和轮廓几何
#区分不同的几何形状,圆形 四边形等
def measure_object(image):
image = cv.GaussianBlur(image, (3, 3), 0)
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
#ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)#
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV | cv.THRESH_OTSU)#取反
print("threshold value : %s"%ret)
cv.imshow("binary image", binary)
dst = cv.cvtColor(binary, cv.COLOR_GRAY2BGR)
contours, hireachy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for i, contour in enumerate(contours):
area = cv.contourArea(contour)#求轮廓的面积,得到第几个轮廓的面积
x, y, w, h = cv.boundingRect(contour)#轮廓的外接矩形的大小,
rate = min(w, h)/max(w, h)
print("rectangle rate : %s"%rate)
mm = cv.moments(contour)#得到contour的几何矩
print(type(mm))#dict字典类型
cx = mm['m10']/mm['m00']
cy = mm['m01']/mm['m00']
cv.circle(dst, (np.int(cx), np.int(cy)), 3, (0, 255, 255), -1)
cv.rectangle(dst, (x, y), (x+w, y+h), (0, 0, 255), 2)#每个轮廓绘制外接矩形
print("contour area %s"%area)
approxCurve = cv.approxPolyDP(contour,4, True)#对指定的点集进行逼近 找出轮廓的多边形拟合曲线
print(approxCurve.shape)
if approxCurve.shape[0] > 6:
cv.drawContours(dst, contours, i, (0, 255, 0), 2)
if approxCurve.shape[0] == 4:
cv.drawContours(dst, contours, i, (0, 0, 255), 2)
if approxCurve.shape[0] == 3:
cv.drawContours(dst, contours, i, (255, 0, 0), 2)
cv.imshow("measure-contours", dst)
print("--------- Python OpenCV Tutorial ---------")
src = cv.imread("../opencv-python-img/coins.jpg")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
measure_object(src)
cv.waitKey(0)
cv.destroyAllWindows()