Qt+OpenCV调用海康工业相机SDK示例开发
文章目录
- 前言
- 一、环境配置
- 二、项目准备
- 三、示例完整代码展示/下载链接
- 四、问题解决
- 总结
前言
近期在Qt环境下进行海康工业相机的使用开发,发现海康提供的示例没有Qt的demo,而其中有基于MFC框架的示例,所以在这里基于该示例进行了Qt调用HIK工业相机的SDK开发,并将相关代码展现出来以便大家学习,如有错误之处,欢迎大家批评指正。
项目效果
提示:以下是本篇文章正文内容,下面案例可供参考
一、环境配置
我的项目示例所用环境是QT5.14+OpenCV_4.5.1,至于如何配置OpenCv环境,具体的可以查看我之前写的这篇文章:Window下Qt5.14_MinGW_64bit+CMake_3.24+OpenCV_4.5.1环境搭建
二、项目准备
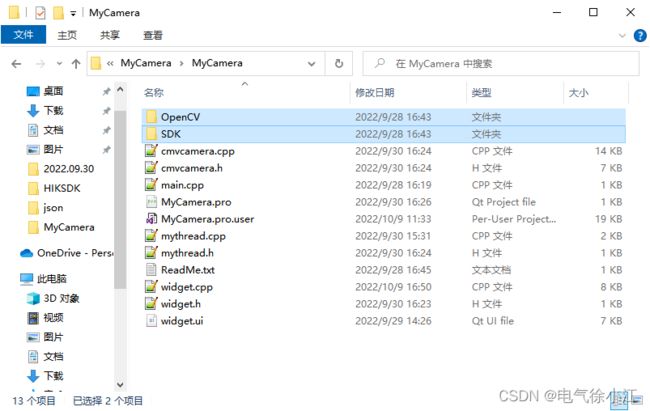
这里我是已经分类好了,将OpenCV及SDK文件夹放置程序同级目录,里面包含需要的一些头文件,库文件等等,下面pro文件中添加的代码可视具体情况而定:
然后在MyCamera.pro文件中添加下列代码:
#OpenCV
INCLUDEPATH += $$PWD/OpenCV/Includes
LIBS += -L $$PWD/OpenCV/Lib/libopencv_*.a
#SDK
INCLUDEPATH += $$PWD/SDK/Includes
DEPENDPATH += $$PWD/SDK/Includes
LIBS += -L $$PWD/SDK/Lib/MvCameraControl.lib
三、示例完整代码展示/下载链接
1.cmvcamera.h(直接从海康提供的SDK中复制)
/************************************************************************/
/* 以C++接口为基础,对常用函数进行二次封装,方便用户使用 */
/************************************************************************/
#ifndef _MV_CAMERA_H_
#define _MV_CAMERA_H_
#include "MvCameraControl.h"
#include 2.cmvcamera.cpp
#include "cmvcamera.h"
CMvCamera::CMvCamera()
{
m_hDevHandle = MV_NULL;
}
CMvCamera::~CMvCamera()
{
if (m_hDevHandle)
{
MV_CC_DestroyHandle(m_hDevHandle);
m_hDevHandle = MV_NULL;
}
}
// ch:获取SDK版本号 | en:Get SDK Version
int CMvCamera::GetSDKVersion()
{
return MV_CC_GetSDKVersion();
}
// ch:枚举设备 | en:Enumerate Device
int CMvCamera::EnumDevices(unsigned int nTLayerType, MV_CC_DEVICE_INFO_LIST* pstDevList)
{
return MV_CC_EnumDevices(nTLayerType, pstDevList);
}
// ch:判断设备是否可达 | en:Is the device accessible
bool CMvCamera::IsDeviceAccessible(MV_CC_DEVICE_INFO* pstDevInfo, unsigned int nAccessMode)
{
return MV_CC_IsDeviceAccessible(pstDevInfo, nAccessMode);
}
// ch:打开设备 | en:Open Device
int CMvCamera::Open(MV_CC_DEVICE_INFO* pstDeviceInfo)
{
if (MV_NULL == pstDeviceInfo)
{
return MV_E_PARAMETER;
}
if (m_hDevHandle)
{
return MV_E_CALLORDER;
}
int nRet = MV_CC_CreateHandle(&m_hDevHandle, pstDeviceInfo);
if (MV_OK != nRet)
{
return nRet;
}
nRet = MV_CC_OpenDevice(m_hDevHandle);
if (MV_OK != nRet)
{
MV_CC_DestroyHandle(m_hDevHandle);
m_hDevHandle = MV_NULL;
}
return nRet;
}
// ch:关闭设备 | en:Close Device
int CMvCamera::Close()
{
if (MV_NULL == m_hDevHandle)
{
return MV_E_HANDLE;
}
MV_CC_CloseDevice(m_hDevHandle);
int nRet = MV_CC_DestroyHandle(m_hDevHandle);
m_hDevHandle = MV_NULL;
return nRet;
}
// ch:判断相机是否处于连接状态 | en:Is The Device Connected
bool CMvCamera::IsDeviceConnected()
{
return MV_CC_IsDeviceConnected(m_hDevHandle);
}
// ch:注册图像数据回调 | en:Register Image Data CallBack
int CMvCamera::RegisterImageCallBack(void(__stdcall* cbOutput)(unsigned char * pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser)
{
return MV_CC_RegisterImageCallBackEx(m_hDevHandle, cbOutput, pUser);
}
// ch:开启抓图 | en:Start Grabbing
int CMvCamera::StartGrabbing()
{
return MV_CC_StartGrabbing(m_hDevHandle);
}
// ch:停止抓图 | en:Stop Grabbing
int CMvCamera::StopGrabbing()
{
return MV_CC_StopGrabbing(m_hDevHandle);
}
// ch:主动获取一帧图像数据 | en:Get one frame initiatively
int CMvCamera::GetImageBuffer(MV_FRAME_OUT* pFrame, int nMsec)
{
return MV_CC_GetImageBuffer(m_hDevHandle, pFrame, nMsec);
}
// ch:释放图像缓存 | en:Free image buffer
int CMvCamera::FreeImageBuffer(MV_FRAME_OUT* pFrame)
{
return MV_CC_FreeImageBuffer(m_hDevHandle, pFrame);
}
// ch:设置显示窗口句柄 | en:Set Display Window Handle
int CMvCamera::DisplayOneFrame(MV_DISPLAY_FRAME_INFO* pDisplayInfo)
{
return MV_CC_DisplayOneFrame(m_hDevHandle, pDisplayInfo);
}
// ch:设置SDK内部图像缓存节点个数 | en:Set the number of the internal image cache nodes in SDK
int CMvCamera::SetImageNodeNum(unsigned int nNum)
{
return MV_CC_SetImageNodeNum(m_hDevHandle, nNum);
}
// ch:获取设备信息 | en:Get device information
int CMvCamera::GetDeviceInfo(MV_CC_DEVICE_INFO* pstDevInfo)
{
return MV_CC_GetDeviceInfo(m_hDevHandle, pstDevInfo);
}
// ch:获取GEV相机的统计信息 | en:Get detect info of GEV camera
int CMvCamera::GetGevAllMatchInfo(MV_MATCH_INFO_NET_DETECT* pMatchInfoNetDetect)
{
if (MV_NULL == pMatchInfoNetDetect)
{
return MV_E_PARAMETER;
}
MV_CC_DEVICE_INFO stDevInfo = {0};
GetDeviceInfo(&stDevInfo);
if (stDevInfo.nTLayerType != MV_GIGE_DEVICE)
{
return MV_E_SUPPORT;
}
MV_ALL_MATCH_INFO struMatchInfo = {0};
struMatchInfo.nType = MV_MATCH_TYPE_NET_DETECT;
struMatchInfo.pInfo = pMatchInfoNetDetect;
struMatchInfo.nInfoSize = sizeof(MV_MATCH_INFO_NET_DETECT);
memset(struMatchInfo.pInfo, 0, sizeof(MV_MATCH_INFO_NET_DETECT));
return MV_CC_GetAllMatchInfo(m_hDevHandle, &struMatchInfo);
}
// ch:获取U3V相机的统计信息 | en:Get detect info of U3V camera
int CMvCamera::GetU3VAllMatchInfo(MV_MATCH_INFO_USB_DETECT* pMatchInfoUSBDetect)
{
if (MV_NULL == pMatchInfoUSBDetect)
{
return MV_E_PARAMETER;
}
MV_CC_DEVICE_INFO stDevInfo = {0};
GetDeviceInfo(&stDevInfo);
if (stDevInfo.nTLayerType != MV_USB_DEVICE)
{
return MV_E_SUPPORT;
}
MV_ALL_MATCH_INFO struMatchInfo = {0};
struMatchInfo.nType = MV_MATCH_TYPE_USB_DETECT;
struMatchInfo.pInfo = pMatchInfoUSBDetect;
struMatchInfo.nInfoSize = sizeof(MV_MATCH_INFO_USB_DETECT);
memset(struMatchInfo.pInfo, 0, sizeof(MV_MATCH_INFO_USB_DETECT));
return MV_CC_GetAllMatchInfo(m_hDevHandle, &struMatchInfo);
}
// ch:获取和设置Int型参数,如 Width和Height,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Int type parameters, such as Width and Height, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetIntValue(IN const char* strKey, OUT MVCC_INTVALUE_EX *pIntValue)
{
return MV_CC_GetIntValueEx(m_hDevHandle, strKey, pIntValue);
}
int CMvCamera::SetIntValue(IN const char* strKey, IN int64_t nValue)
{
return MV_CC_SetIntValueEx(m_hDevHandle, strKey, nValue);
}
// ch:获取和设置Enum型参数,如 PixelFormat,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Enum type parameters, such as PixelFormat, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetEnumValue(IN const char* strKey, OUT MVCC_ENUMVALUE *pEnumValue)
{
return MV_CC_GetEnumValue(m_hDevHandle, strKey, pEnumValue);
}
int CMvCamera::SetEnumValue(IN const char* strKey, IN unsigned int nValue)
{
return MV_CC_SetEnumValue(m_hDevHandle, strKey, nValue);
}
int CMvCamera::SetEnumValueByString(IN const char* strKey, IN const char* sValue)
{
return MV_CC_SetEnumValueByString(m_hDevHandle, strKey, sValue);
}
int CMvCamera::GetEnumEntrySymbolic(IN const char* strKey, IN MVCC_ENUMENTRY* pstEnumEntry)
{
return MV_CC_GetEnumEntrySymbolic(m_hDevHandle, strKey, pstEnumEntry);
}
// ch:获取和设置Float型参数,如 ExposureTime和Gain,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Float type parameters, such as ExposureTime and Gain, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetFloatValue(IN const char* strKey, OUT MVCC_FLOATVALUE *pFloatValue)
{
return MV_CC_GetFloatValue(m_hDevHandle, strKey, pFloatValue);
}
int CMvCamera::SetFloatValue(IN const char* strKey, IN float fValue)
{
return MV_CC_SetFloatValue(m_hDevHandle, strKey, fValue);
}
// ch:获取和设置Bool型参数,如 ReverseX,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Bool type parameters, such as ReverseX, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetBoolValue(IN const char* strKey, OUT bool *pbValue)
{
return MV_CC_GetBoolValue(m_hDevHandle, strKey, pbValue);
}
int CMvCamera::SetBoolValue(IN const char* strKey, IN bool bValue)
{
return MV_CC_SetBoolValue(m_hDevHandle, strKey, bValue);
}
// ch:获取和设置String型参数,如 DeviceUserID,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件UserSetSave
// en:Get String type parameters, such as DeviceUserID, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetStringValue(IN const char* strKey, MVCC_STRINGVALUE *pStringValue)
{
return MV_CC_GetStringValue(m_hDevHandle, strKey, pStringValue);
}
int CMvCamera::SetStringValue(IN const char* strKey, IN const char* strValue)
{
return MV_CC_SetStringValue(m_hDevHandle, strKey, strValue);
}
// ch:执行一次Command型命令,如 UserSetSave,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Execute Command once, such as UserSetSave, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::CommandExecute(IN const char* strKey)
{
return MV_CC_SetCommandValue(m_hDevHandle, strKey);
}
// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
int CMvCamera::GetOptimalPacketSize(unsigned int* pOptimalPacketSize)
{
if (MV_NULL == pOptimalPacketSize)
{
return MV_E_PARAMETER;
}
int nRet = MV_CC_GetOptimalPacketSize(m_hDevHandle);
if (nRet < MV_OK)
{
return nRet;
}
*pOptimalPacketSize = (unsigned int)nRet;
return MV_OK;
}
// ch:注册消息异常回调 | en:Register Message Exception CallBack
int CMvCamera::RegisterExceptionCallBack(void(__stdcall* cbException)(unsigned int nMsgType, void* pUser),void* pUser)
{
return MV_CC_RegisterExceptionCallBack(m_hDevHandle, cbException, pUser);
}
// ch:注册单个事件回调 | en:Register Event CallBack
int CMvCamera::RegisterEventCallBack(const char* pEventName, void(__stdcall* cbEvent)(MV_EVENT_OUT_INFO * pEventInfo, void* pUser), void* pUser)
{
return MV_CC_RegisterEventCallBackEx(m_hDevHandle, pEventName, cbEvent, pUser);
}
// ch:强制IP | en:Force IP
int CMvCamera::ForceIp(unsigned int nIP, unsigned int nSubNetMask, unsigned int nDefaultGateWay)
{
return MV_GIGE_ForceIpEx(m_hDevHandle, nIP, nSubNetMask, nDefaultGateWay);
}
// ch:配置IP方式 | en:IP configuration method
int CMvCamera::SetIpConfig(unsigned int nType)
{
return MV_GIGE_SetIpConfig(m_hDevHandle, nType);
}
// ch:设置网络传输模式 | en:Set Net Transfer Mode
int CMvCamera::SetNetTransMode(unsigned int nType)
{
return MV_GIGE_SetNetTransMode(m_hDevHandle, nType);
}
// ch:像素格式转换 | en:Pixel format conversion
int CMvCamera::ConvertPixelType(MV_CC_PIXEL_CONVERT_PARAM* pstCvtParam)
{
return MV_CC_ConvertPixelType(m_hDevHandle, pstCvtParam);
}
// ch:保存图片 | en:save image
int CMvCamera::SaveImage(MV_SAVE_IMAGE_PARAM_EX* pstParam)
{
return MV_CC_SaveImageEx2(m_hDevHandle, pstParam);
}
// ch:保存图片为文件 | en:Save the image as a file
int CMvCamera::SaveImageToFile(MV_SAVE_IMG_TO_FILE_PARAM* pstSaveFileParam)
{
return MV_CC_SaveImageToFile(m_hDevHandle, pstSaveFileParam);
}
// ch:绘制圆形辅助线 | en:Draw circle auxiliary line
int CMvCamera::DrawCircle(MVCC_CIRCLE_INFO* pCircleInfo)
{
return MV_CC_DrawCircle(m_hDevHandle, pCircleInfo);
}
// ch:绘制线形辅助线 | en:Draw lines auxiliary line
int CMvCamera::DrawLines(MVCC_LINES_INFO* pLinesInfo)
{
return MV_CC_DrawLines(m_hDevHandle, pLinesInfo);
}
//读取相机中的图像
int CMvCamera::ReadBuffer(Mat &image)
{
Mat* getImage = new Mat();
unsigned int nRecvBufSize = 0;
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
int tempValue = MV_CC_GetIntValue(m_hDevHandle, "PayloadSize", &stParam);
if (tempValue != 0)
{
return -1;
}
nRecvBufSize = stParam.nCurValue;
unsigned char* pDate;
pDate=(unsigned char *)malloc(nRecvBufSize);
MV_FRAME_OUT_INFO_EX stImageInfo = {0};
tempValue= MV_CC_GetOneFrameTimeout(m_hDevHandle, pDate, nRecvBufSize, &stImageInfo, 700);
if(tempValue!=0)
{
return -1;
}
m_nBufSizeForSaveImage = stImageInfo.nWidth * stImageInfo.nHeight * 3 + 2048;
unsigned char* m_pBufForSaveImage;
m_pBufForSaveImage = (unsigned char*)malloc(m_nBufSizeForSaveImage);
bool isMono;
switch (stImageInfo.enPixelType)
{
case PixelType_Gvsp_Mono8:
case PixelType_Gvsp_Mono10:
case PixelType_Gvsp_Mono10_Packed:
case PixelType_Gvsp_Mono12:
case PixelType_Gvsp_Mono12_Packed:
isMono=true;
break;
default:
isMono=false;
break;
}
if(isMono)
{
*getImage = Mat(stImageInfo.nHeight,stImageInfo.nWidth,CV_8UC1,pDate);
//imwrite("d:\\测试opencv_Mono.tif", image);
}
else
{
//转换图像格式为BGR8
MV_CC_PIXEL_CONVERT_PARAM stConvertParam = {0};
memset(&stConvertParam, 0, sizeof(MV_CC_PIXEL_CONVERT_PARAM));
stConvertParam.nWidth = stImageInfo.nWidth; //ch:图像宽 | en:image width
stConvertParam.nHeight = stImageInfo.nHeight; //ch:图像高 | en:image height
//stConvertParam.pSrcData = m_pBufForDriver; //ch:输入数据缓存 | en:input data buffer
stConvertParam.pSrcData = pDate; //ch:输入数据缓存 | en:input data buffer
stConvertParam.nSrcDataLen = stImageInfo.nFrameLen; //ch:输入数据大小 | en:input data size
stConvertParam.enSrcPixelType = stImageInfo.enPixelType; //ch:输入像素格式 | en:input pixel format
stConvertParam.enDstPixelType = PixelType_Gvsp_BGR8_Packed; //ch:输出像素格式 | en:output pixel format 适用于OPENCV的图像格式
//stConvertParam.enDstPixelType = PixelType_Gvsp_RGB8_Packed; //ch:输出像素格式 | en:output pixel format
stConvertParam.pDstBuffer = m_pBufForSaveImage; //ch:输出数据缓存 | en:output data buffer
stConvertParam.nDstBufferSize = m_nBufSizeForSaveImage; //ch:输出缓存大小 | en:output buffer size
MV_CC_ConvertPixelType(m_hDevHandle, &stConvertParam);
*getImage = Mat(stImageInfo.nHeight,stImageInfo.nWidth,CV_8UC3,m_pBufForSaveImage);
//imwrite("d:\\测试opencv_Color.tif", image);
}
(*getImage).copyTo(image);
(*getImage).release();
free(pDate);
free(m_pBufForSaveImage);
return 0;
}
3.mythread.h
#ifndef MYTHREAD_H
#define MYTHREAD_H
#include 4.mythread.cpp
#include "mythread.h"
MyThread::MyThread(QObject *parent)
: QThread{parent}
{
myImage = new QImage();
}
MyThread::~MyThread()
{
delete myImage;
if(cameraPtr == NULL)
{
delete cameraPtr;
}
if(imagePtr == NULL)
{
delete imagePtr;
}
}
void MyThread::getCameraPtr(CMvCamera *camera)
{
cameraPtr = camera;
}
void MyThread::getImagePtr(cv::Mat *image)
{
imagePtr = image;
}
void MyThread::run()
{
if(cameraPtr == NULL)
{
return;
}
if(imagePtr == NULL)
{
return;
}
while(!isInterruptionRequested())
{
qDebug()<<"SoftTrigger:"<<cameraPtr->CommandExecute("TriggerSoftware");
qDebug()<<"ReadBuffer:"<<cameraPtr->ReadBuffer(*imagePtr);
//先发送好再处理
//emit signal_message();
//msleep(10);
//先处理好再发送
if(imagePtr->channels()>1)
{
*myImage = QImage((const unsigned char*)(imagePtr->data),imagePtr->cols,imagePtr->rows,QImage::Format_RGB888);
}
else
{
*myImage = QImage((const unsigned char*)(imagePtr->data),imagePtr->cols,imagePtr->rows,QImage::Format_Indexed8);
}
emit signal_messImage(*myImage);
msleep(10);
//耗时操作,需要放到线程中保存
//QImage保存图像
//QString savePath = QDir::currentPath() + "/myImage/";
//QString curDate = QDateTime::currentDateTime().toString("yyyyMMdd-hhmmss.zzz");
//QString saveName = savePath + curDate + ".png";
//qDebug()<<"saveName:"<
//myImage->save(saveName);
}
}
5.widget.h
#ifndef WIDGET_H
#define WIDGET_H
#include 6.widget.cpp
#include "widget.h"
#include "ui_widget.h"
Widget::Widget(QWidget *parent)
: QWidget(parent)
, ui(new Ui::Widget)
{
ui->setupUi(this);
initWidget();
}
Widget::~Widget()
{
delete ui;
delete myImage;
if(m_pcMyCamera)
{
m_pcMyCamera->Close();
delete m_pcMyCamera;
m_pcMyCamera = NULL;
}
if(myThread->isRunning())
{
myThread->requestInterruption();
myThread->wait();
delete myThread;
}
}
void Widget::initWidget()
{
//设置窗口属性
this->setWindowTitle("相机测试");
this->setWindowFlags(Qt::WindowCloseButtonHint | Qt::Dialog);
this->setWindowModality(Qt::ApplicationModal);
this->setFixedSize(this->width(),this->height());
//初始化变量
m_bOpenDevice = false;
//生成保存图片的文件夹
QString imagePath = QDir::currentPath() + "/myImage/";
QDir dstDir(imagePath);
if(!dstDir.exists())
{
if(!dstDir.mkdir(imagePath))
{
qDebug()<<"创建Image文件夹失败!";
//return;
}
}
//图像指针对象
myImage = new Mat();
//线程对象实例化
myThread = new MyThread();
connect(myThread,SIGNAL(signal_message()),this,SLOT(slot_display()));
connect(myThread,SIGNAL(signal_messImage(QImage)),this,SLOT(slot_displayImage(QImage)));
}
//保存图片
void Widget::saveImage(QString format)
{
if(ui->lb_show->pixmap() == NULL)
{
QMessageBox::warning(this,"警告","保存失败,未采集到图像!");
return;
}
//QPixmap方法保存在程序运行目录
//format: .bmp .tif .png .jpg
QString savePath = QDir::currentPath() + "/myImage/";
QString curDate = QDateTime::currentDateTime().toString("yyyyMMdd-hhmmss.zzz");
QString saveName = savePath + curDate + "." + format;
const QPixmap *curImage = ui->lb_show->pixmap();
qDebug()<<"saveName:"<<saveName;
if(curImage->save(saveName))
{
qDebug()<<"保存成功!";
}
else
{
qDebug()<<"保存失败!";
}
}
//用于显示单张图像
void Widget::display(const Mat* imagePtr)
{
qDebug()<<"single display ok";
//判断是黑白、彩色图像
QImage* QmyImage = new QImage();
if(imagePtr->channels()>1)
{
*QmyImage = QImage((const unsigned char*)(imagePtr->data),imagePtr->cols,imagePtr->rows,QImage::Format_RGB888);
}
else
{
*QmyImage = QImage((const unsigned char*)(imagePtr->data),imagePtr->cols,imagePtr->rows,QImage::Format_Indexed8);
}
*QmyImage = (*QmyImage).scaled(ui->lb_show->size(),Qt::IgnoreAspectRatio,Qt::SmoothTransformation);
//QImage保存图像
//QmyImage->save(saveName);
//显示图像
ui->lb_show->setPixmap(QPixmap::fromImage(*QmyImage));
delete QmyImage;
}
void Widget::slot_display()
{
qDebug()<<"continuous display ok";
//判断是黑白、彩色图像
QImage *QmyImage = new QImage();
if(myImage->channels()>1)
{
*QmyImage = QImage((const unsigned char*)(myImage->data),myImage->cols,myImage->rows,QImage::Format_RGB888);
}
else
{
*QmyImage = QImage((const unsigned char*)(myImage->data),myImage->cols,myImage->rows,QImage::Format_Indexed8);
}
*QmyImage = (*QmyImage).scaled(ui->lb_show->size(),Qt::IgnoreAspectRatio,Qt::SmoothTransformation);
//显示图像
ui->lb_show->setPixmap(QPixmap::fromImage(*QmyImage));
delete QmyImage;
}
void Widget::slot_displayImage(QImage myImage)
{
//显示图像
//QSize imageSize = QSize(400,400);
//可以使用imageSize代替ui->lb_show->size(),固定图片显示窗口的大小,解决布局情况下图像窗口逐渐变大的bug。
myImage = (myImage).scaled(ui->lb_show->size(),Qt::IgnoreAspectRatio,Qt::SmoothTransformation);
ui->lb_show->setPixmap(QPixmap::fromImage(myImage));
}
void Widget::on_pb_find_clicked()
{
ui->cb_devices->clear();
memset(&m_stDevList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
//枚举子网内所有设备
int nRet = CMvCamera::EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE,&m_stDevList);
if (MV_OK != nRet)
{
return;
}
for(unsigned int i = 0; i < m_stDevList.nDeviceNum; i++)
{
MV_CC_DEVICE_INFO* pDeviceInfo = m_stDevList.pDeviceInfo[i];
QString strModelName = "";
if(pDeviceInfo->nTLayerType == MV_USB_DEVICE)
{
strModelName = (char*)pDeviceInfo->SpecialInfo.stUsb3VInfo.chModelName;
}
else if(pDeviceInfo->nTLayerType == MV_GIGE_DEVICE)
{
strModelName = (char*)pDeviceInfo->SpecialInfo.stGigEInfo.chModelName;
}
else
{
QMessageBox::warning(this,"警告","未知设备枚举!");
return;
}
qDebug()<<"strModelName:"<<strModelName;
ui->cb_devices->addItem(strModelName);
}
}
void Widget::on_pb_open_clicked()
{
if(m_bOpenDevice)
{
return;
}
QString deviceModel = ui->cb_devices->currentText();
if(deviceModel == "")
{
QMessageBox::warning(this,"警告","请选择设备!");
return;
}
m_pcMyCamera = new CMvCamera;
if(NULL == m_pcMyCamera)
{
return;
}
int nIndex = ui->cb_devices->currentIndex();
//打开设备
int nRet = m_pcMyCamera->Open(m_stDevList.pDeviceInfo[nIndex]);
qDebug()<<"Connect:"<<nRet;
if(MV_OK != nRet)
{
delete m_pcMyCamera;
m_pcMyCamera = NULL;
QMessageBox::warning(this,"警告","打开设备失败!");
return;
}
//设置为触发模式
qDebug()<<"TriggerMode:"<<m_pcMyCamera->SetEnumValue("TriggerMode",1);
//设置触发源为软触发
qDebug()<<"TriggerSource:"<<m_pcMyCamera->SetEnumValue("TriggerSource",7);
//设置曝光时间
qDebug()<<"SetExposureTime:"<<m_pcMyCamera->SetFloatValue("ExposureTime",5000);
//开启相机采集
qDebug()<<"StartCamera:"<<m_pcMyCamera->StartGrabbing();
myThread->getCameraPtr(m_pcMyCamera);
myThread->getImagePtr(myImage);
m_bOpenDevice = true;
}
void Widget::on_pb_close_clicked()
{
if(m_pcMyCamera)
{
m_pcMyCamera->Close();
delete m_pcMyCamera;
m_pcMyCamera = NULL;
m_bOpenDevice = false;
}
}
void Widget::on_pb_single_clicked()
{
if(!m_bOpenDevice)
{
QMessageBox::warning(this,"警告","采集失败,请打开设备!");
return;
}
Mat *image = new Mat();
//发送软触发
qDebug()<<"single SoftTrigger:"<<m_pcMyCamera->CommandExecute("TriggerSoftware");
//读取Mat格式的图像
qDebug()<<"single ReadBuffer:"<<m_pcMyCamera->ReadBuffer(*image);
display(image);
//释放指针
delete image;
}
void Widget::on_pb_start_clicked()
{
if(!m_bOpenDevice)
{
QMessageBox::warning(this,"警告","采集失败,请打开设备!");
return;
}
if(!myThread->isRunning())
{
myThread->start();
}
}
void Widget::on_pb_stop_clicked()
{
if(myThread->isRunning())
{
myThread->requestInterruption();
myThread->wait();
}
}
void Widget::on_pb_saveBmp_clicked()
{
saveImage("bmp"); //文件较大
}
void Widget::on_pb_savePng_clicked()
{
saveImage("png"); //文件较小
}
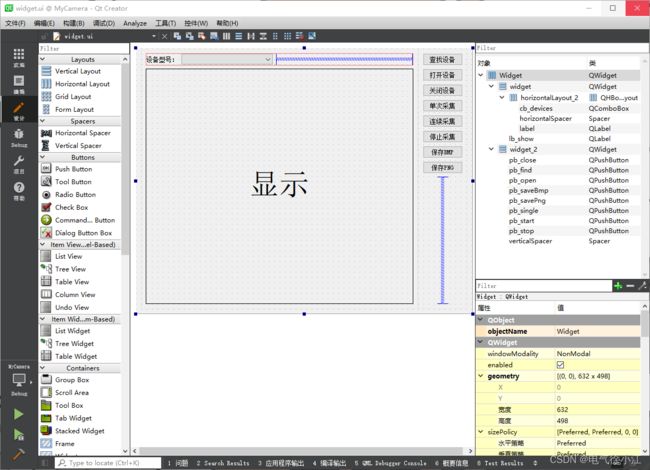
7.widget.ui
8.完整代码百度网盘链接
链接:https://pan.baidu.com/s/1bs59hJz155NP3aQMnqCDSA
提取码:xxcj
四、问题解决
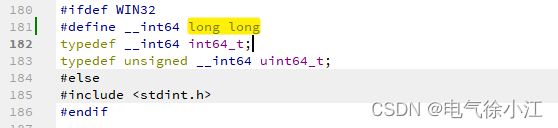
1.error: ‘__int64’ does not name a type; did you mean ‘__divtc3’? typedef __int64 int64_t;
解决方法:
进入PixelType.h文件,修改Line:181
#define __int64 long long
2.error: reference to ‘ACCESS_MASK’ is ambiguous typedef ACCESS_MASK *PACCESS_MASK;
解决方法:
将头文件中的“using namespac cv;”屏蔽或删除,
然后在相应的函数或者数据类型加上前缀“cv::” 如:“cv::Mat”
总结
这个示例相较于海康提供的demo也是少了几个设置参数的功能,实现的也比较简单,其中图像保存使用了qt中的QPixmap方法保存在程序运行目录,另外一些前期的准备工作没有写在本文中,具体的可以查看下列参考博客。
hello:
共同学习,共同进步,如果还有相关问题,可在评论区留言进行讨论。
参考博客:手把手带你模仿 海康威视sdk+Qt 的二次开发(下)
海康威视工业相机SDK二次开发(VS+Opencv+QT+海康SDK+C++)(二)