常见聚类算法总结
目录
- 一.关于聚类
- 什么是聚类:
- 什么不是聚类:
- 聚类的种类:
- 数据间的相似度度量:
- 簇间相似度度量:
- 评估不同聚类方案的优劣:
- 聚类方法的分类:
- 聚类算法之外的处理方法:
- 二.划分式聚类方法
- k-means:
- 三.基于密度的聚类:
- DBSCAN 算法:
- 四.层次聚类:
- 凝聚式聚类:
- 分裂式聚类:
- 治愈算法(CURE(Clustering Using Representative)):
- 稀疏化邻近图:
- 变色龙算法:
- 五.基于网格的聚类:
- 子空间聚类:
- 六.基于模型的聚类
- GMM:
回到顶部
一.关于聚类
什么是聚类:
聚类(Clustering)是按照某个特定标准(如距离)把一个数据集分割成不同的类或簇,使得同一个簇内的数据对象的相似性尽可能大,同时不在同一个簇中的数据对象的差异性也尽可能地大。也即聚类后同一类的数据尽可能聚集到一起,不同类数据尽量分离。
什么不是聚类:
● 监督分类 – 有类标签信息(通常就叫做分类)
● 简单分割 – 按姓氏的字母顺序将学生分为不同的注册组
● 查询结果 – 分组是外部规范的结果
● 图形分区 – 一些相互关联和协同作用,但领域并不相同
聚类的种类:
按照聚类方式:


按照排他性:在排他性聚类中,点只能属于一个聚类;在非排他性聚类中,点可能属于多个聚类,可以表示多个类或"边界"点。
按照模糊性:在模糊聚类中,一个点属于每个权重在 0 到 1 之间的聚类,权重必须总和为 1,概率聚类具有相似的特点。非模糊聚类中,每个点有唯一的预测类别
按照簇的组织方式:
基于中心的集群:簇是一组对象,使得簇中的对象比任何其他簇的中心更接近 (更相似)簇的“中心”,簇的中心通常是质心,即簇中所有点的平均值,或者是中心点,即簇中最具“代表性”的点


数据间的相似度度量:

闵可夫斯基距离就是Lp范数(p为正整数),而曼哈顿距离、欧式距离、切比雪夫距离分别对应
![]()
簇间相似度度量:
1)最小值:
2)最大值:

3)组平均:

4)质心距离
5)Ward 方法:基于SSE的增加(在层次聚类中越小合并效果越好)
![]()
不太容易受到噪音和异常值的影响,偏向球状星团
评估不同聚类方案的优劣:
最常见的度量是平方误差总和 (SSE,Sum of Square Error),每个点距离自己所在簇的代表点(均值点)的距离之和,减少 SSE 的一种简单方法是增加 K,集群的数量
另一种方法:方差比率

N,图中的总点数
聚类方法的分类:
| 类别 |
包括的主要算法 |
| 划分方法 |
K-Means算法(均值)、K-medoids算法(中心点)、K-modes算法(众数)、k-prototypes算法、CLARANS(基于选择),K-Means++,bi-KMeans |
| 层次分析 |
BIRCH算法(平衡迭代规约)、CURE算法(点聚类)、CHAMELEON(动态模型),Agglomerative(凝聚式),Divisive(分裂式) |
| 基于密度 |
DBSCAN(基于高密度连接区域)、DENCLUE(密度分布函数)、OPTICS(对象排序识别) |
| 基于网格 |
STING(统计信息网络)、CLIOUE(聚类高维空间)、WAVE-CLUSTER(小波变换) |
| 基于模型 |
统计学方法(比如GMM)、神经网络(比如SOM(Self Organized Maps)) |
| 其他方法 |
量子聚类,核聚类,谱聚类 |
聚类算法之外的处理方法:

回到顶部
二.划分式聚类方法
k-means:
算法流程:
1.选择K点作为初始质心
2.重复直到质心不变
(1)通过将所有点指定给最近的质心形成K簇
(2)重新计算每个簇的质心
初始质心通常是随机选择的,产生的集群因一次运行而异。大多数收敛发生在前几次迭代中,因为通常将停止条件更改为“直到相对较少的点更改集群”
K值的选择:

对 k = 1,2,4,8,... 运行 k-means 算法,找到两个值 v 和 2v,它们之间的平均直径几乎没有减少,证明的 k 值位于 v/2 和 v 之间,然后在这之间使用二分搜索
处理K-means产生的空簇:选择对 SSE 贡献最大的点;从具有最高 SSE 的集群中选择一个点。并入空簇,这样下一轮空簇的中心就会移到选的点去
举例:
更新一轮后

增量更新中心的 K-means:在基本的 K-means 算法中,在所有点都分配给一个质心后更新质心
另一种方法是在分配一个点后更新质心(增量方法)
– 每个分配更新零个或两个质心
– 更高代价
– 引入顺序依赖
– 永远不会得到一个空集群
– 可以使用“权重”来改变影响
bi-k-means算法:
初始只有一个cluster包含所有样本点;
repeat:
从待分裂的clusters中选择一个进行二元分裂,所选的cluster应使得SSE最小(可以每一个都分裂,选SSE的最小那个);
until 有k个cluster
k-means++算法:
k-means++是针对k-means中初始质心点选取的优化算法。该算法的流程和k-means类似,改变的地方只有初始质心的选取,该部分的算法流程如下

K-means 的局限性:当集群尺寸或密度不同时,集群为非球形形状,数据包含异常值时,K-means 可能会有问题。一种解决方案是使用大量集群,找到集群的部分,最后结合在一起(提升k值后再使用人工方法)



回到顶部
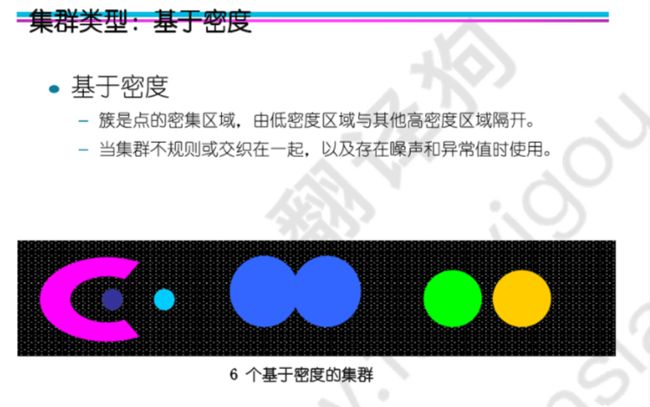
三.基于密度的聚类:
基于密度的聚类定位由低密度区域彼此分隔的高密度区域。

DBSCAN 算法:
核心点:在半径 Eps 内具有超过指定数量的点 (MinPts)
边界点:点在半径 Eps 内少于 MinPts 个点,但在核心点的邻域(半径EPS的圈内)内
噪声点:既不是核心点也不是边界点的任何点


相距 Eps 之内的任意两个核心点都在同一个簇中,任何在核心点半径 Eps 内的边界点都与核心点放在同一个簇中,丢弃所有噪声点(DBSCAN是部分聚类方法,并非所有点都被聚类)
DBSCAN 实际上需要 O(n2) 时间,只要允许聚类结果的轻微不准确,运行时间就可以显着降低到 O(n)
想法是对于集群中的点,它们的第k最近邻距离大致相同;噪声点在更远的距离处具有第k最近邻距离;因此,绘制每个点到其第k最近邻距离的排序距离

由图:3000个点里2800个第4近邻在10以内,因此可以设置EPS=10,MinPts=4
回到顶部
四.层次聚类:

凝聚式聚类:

类似与凝聚式聚类的方法可以作为kmeans的质心初始化步骤

非欧空间不能选质心的问题:因为非欧空间无法求平均,可以用以下方法代替

可以选以上值最小的点作为集群的中心
分裂式聚类:


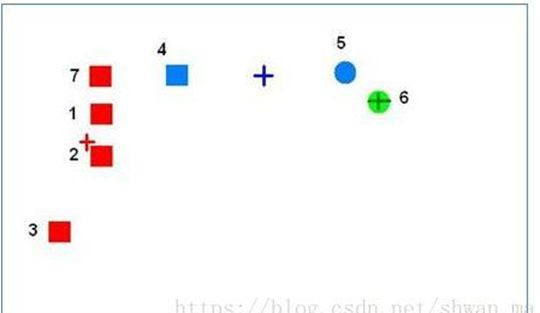
治愈算法(CURE(Clustering Using Representative)):
不是通过质心来表示集群,而是使用一组代表点。

CURE 能够更好地处理任意形状和大小的集群。向中心收缩代表点有助于避免噪声和异常值问题。

合并集群的同时,剔除孤立点

cure的特点:使用了采样减少计算量;使用多个点代表集群,可以匹配那些非球形的场景,而且收缩因子的使用可以减少噪音对聚类的影响

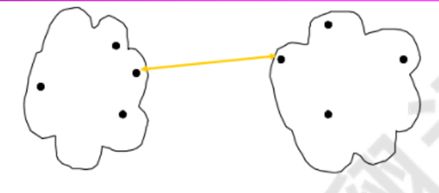
稀疏化邻近图:
(从图的角度理解聚类)



变色龙算法:
当前合并方案的局限性:层次聚类算法中现有的合并方案本质上是静态的
变色龙可以适应数据集特征寻找自然聚类,使用动态模型来衡量集群之间的相似性和互连性。
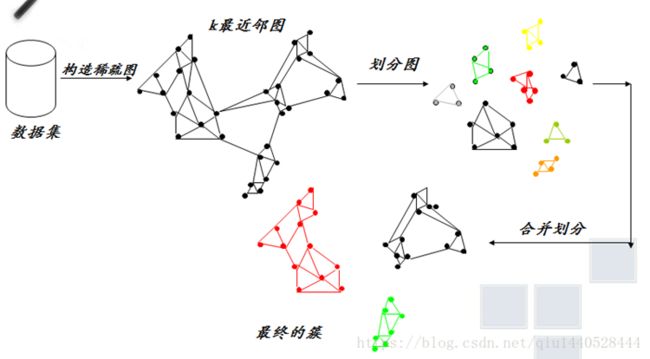
1. k-最近邻图Gk的构造(第一阶段)
Gk图中的每个点,表示数据集中的一个数据点。对于数据集中的每一个数据点找出它的所有k-最近邻对象,然后分别在它们之间加带权边。
如何找k-最近邻对象呢??即找离该对象最近的k个对象点,
(定义:若点ai到另一个点bi的距离值是所有数据点到bi的距离值中k个最小值之一,则称ai是bi的k-最近邻对象。)
若一个数据点是另一个数据点的k-最近邻对象之一,则在这两点之间加一条带权边,边的权值表示这两个数据点之间的相似度,即距离越大边权值越小,则近似度越小。
2.划分图(第二阶段)
所做的一件关键的事情就是形成小簇集,由零星的几个数据点连成小簇,官方的作法是用hMetic算法根据最小化截断的边的权重和来分割k-最近邻图,然后我网上找了一些资料,没有确切的hMetic算法,借鉴了网上其他人的一些办法,于是用了一个很简单的思路,就是给定一个点,把他离他最近的k个点连接起来,就算是最小簇了。事实证明,效果也不会太差,最近的点的换一个意思就是与其最大权重的边,采用距离的倒数最为权重的大小。因为后面的计算,用到的会是权重而不是距离
3.
首先是2个略复杂的公式:
相对互连性RI

相对近似性RC

Ci,Cj表示的是i,j聚簇内的数据点的个数,EC(Ci)表示的Ci聚簇内的边的权重和,EC(Ci,Cj)表示的是连接2个聚簇的边的权重和。
那么合并的过程如下:
1、给定度量函数如下minMetric,
2、访问每个簇,计算他与邻近的每个簇的RC和RI,通过度量函数公式计算出值tempMetric。
3、找到最大的tempMetric,如果最大的tempMetric超过阈值minMetric,将簇与此值对应的簇合并
4、如果找到的最大的tempMetric没有超过阈值,则表明此聚簇已合并完成,移除聚簇列表,加入到结果聚簇中。
5、递归步骤2,直到待合并聚簇列表最终大小为空。
回到顶部
五.基于网格的聚类:
定义一组网格单元,将对象分配给单元格并计算每个单元格的密度,消除密度低于指定阈值 t 的细胞,从连续的密集细胞组形成簇。
网格单元的密度是单元中的点数除以单元的体积


子空间聚类:
去掉几个属性维度进行聚类
CLIQUE 算法:基于网格和先验的方法(如果一批点在第k维密集,那它们在k-1维也密集)
1. 找到每个属性对应的一维空间中的所有密集区间
2. K = 2 ,重复直到没有候选密集 k 维单元格
从密集 (k – 1) 维单元格生成所有候选密集 k 维单元格
消除密度小于阈值的细胞
K = K + 1
3. 通过对所有连续的密集单元进行联合来查找簇。
回到顶部
六.基于模型的聚类
GMM:
