Control-车辆动力学模型
动力学主要研究作用于物体的力与物体运动的关系,车辆动力学模型一般用于分析车辆的平顺性和车辆操纵性的稳定性。对于车辆动力学,主要是研究车辆轮胎及相关部件的受力情况。比如纵向速度控制通过控制轮胎转速实现,横向航向控制通过控制轮胎转角实现。
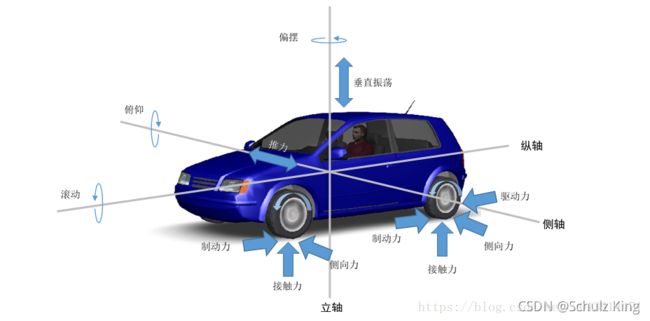
正常情况下,车辆上的作用力沿着三个不同的轴分布:
- x x x轴上的力:驱动力、制动力、滚动阻力和拖曳阻力。车辆绕 x x x轴做滚动运动;
- y y y轴上的力:转向力、离心力和侧风力。车辆绕 y y y轴做俯仰运动;
- z z z轴上的力:地面支持力、风压力。车辆绕 z z z轴做横摆运动;
在单车模型假设的前提下,做以下假设:
- 只考虑纯侧偏轮胎特性,忽略轮胎力的横纵向耦合关系;
- 不考虑载荷转移;
- 忽略横纵向空气动力学。
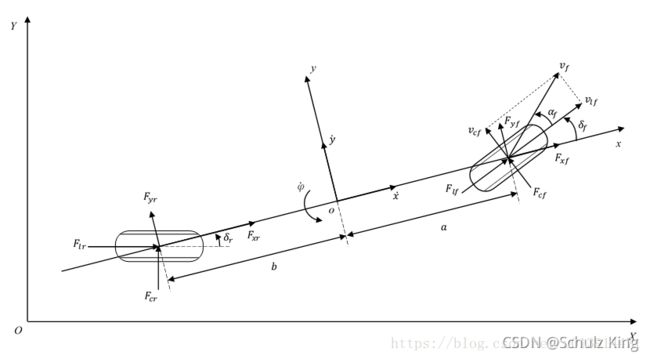
如图所示,单车模型具有两个自由度:绕 z z z轴的横摆运动和沿 x x x轴的纵向运动。轮胎滑移角是轮胎方向和轮胎速度方向的夹角,产生原因主要是由于轮胎所受合力并非朝向车轮行进的方向,但车轮的偏移角通常较小。
根据牛顿第二定律,分别沿 x x x轴、 y y y轴、 z z z轴做受力分析:
在 x x x轴:
m a x = F x , f + F x , r (1) m a_x = F_{x,f} + F_{x,r} \tag{1} max=Fx,f+Fx,r(1)
在 y y y轴:
m a y = F y , f + F y , r (2) m a_y = F_{y,f} + F_{y,r} \tag{2} may=Fy,f+Fy,r(2)
在 z z z轴:
I z ψ ¨ = a F y , f − b F y , r (3) I_z \ddot{\psi} = a F_{y,f} - b F_{y,r} \tag{3} Izψ¨=aFy,f−bFy,r(3)
车辆在 y y y轴的加速度 a y a_y ay由两部分构成: y y y轴的位移相关的加速度 y ¨ \ddot{y} y¨和向心加速度 v x ψ ˙ v_x \dot{\psi} vxψ˙:
a y = y ¨ + v x ψ ˙ (4) a_y = \ddot{y} + v_x \dot{\psi} \tag{4} ay=y¨+vxψ˙(4)
则公式(2)转变为:
m ( y ¨ + v x ψ ˙ ) = F y , f + F y , r (5) m (\ddot{y} + v_x \dot{\psi}) = F_{y,f} + F_{y,r} \tag{5} m(y¨+vxψ˙)=Fy,f+Fy,r(5)
由于轮胎受到横向压力,会有一个很小的滑移角,如下图所示:
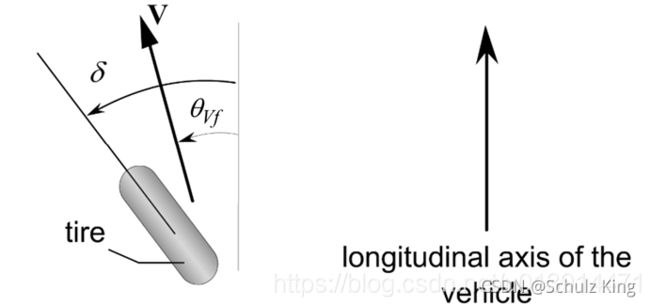
前后轮滑移角:
{ α f = δ − θ v , f α r = − θ v , r (6) \begin{cases} \alpha_f = \delta - \theta_{v,f} \\ \alpha_r = - \theta_{v,r} \end{cases} \tag{6} {αf=δ−θv,fαr=−θv,r(6)
其中, θ v , f \theta_{v,f} θv,f为前轮速度方向, δ \delta δ为前轮转角, θ v , r \theta_{v,r} θv,r为后轮速度方向,后轮转角为 0 0 0。
前后轮所受横向力为:
{ F y , f = 2 C α , f α f = 2 C α , f ( δ − θ v , f ) F y , r = 2 C α , r α r = 2 C α , r ( − θ v , r ) (7) \begin{cases} F_{y,f} = 2 C_{\alpha,f}\alpha_f = 2 C_{\alpha,f}(\delta - \theta_{v,f}) \\ F_{y,r} = 2 C_{\alpha,r} \alpha_r = 2 C_{\alpha,r} (- \theta_{v,r}) \end{cases} \tag{7} {Fy,f=2Cα,fαf=2Cα,f(δ−θv,f)Fy,r=2Cα,rαr=2Cα,r(−θv,r)(7)
其中, C α , f , C α , r C_{\alpha,f},C_{\alpha,r} Cα,f,Cα,r分别为前后轮胎的侧偏刚度,因为前后各有两个轮胎,因此乘以 2 2 2。
θ v , f , θ v , r \theta_{v,f},\theta_{v,r} θv,f,θv,r的计算如下:
{ tan ( θ v , f ) = v y + l f ψ ˙ v x tan ( θ v , r ) = v y − l r ψ ˙ v x (8) \begin{cases} \tan(\theta_{v,f}) = \frac{v_y + l_f \dot{\psi}}{v_x} \\ \tan(\theta_{v,r}) = \frac{v_y - l_r \dot{\psi}}{v_x} \end{cases} \tag{8} {tan(θv,f)=vxvy+lfψ˙tan(θv,r)=vxvy−lrψ˙(8)
根据小角度近似可得:
{ θ v , f = y ˙ + l f ψ ˙ v x θ v , r = y ˙ − l r ψ ˙ v x (8) \begin{cases} \theta_{v,f} = \frac{\dot{y} + l_f \dot{\psi}}{v_x} \\ \theta_{v,r} = \frac{\dot{y} - l_r \dot{\psi}}{v_x} \end{cases} \tag{8} {θv,f=vxy˙+lfψ˙θv,r=vxy˙−lrψ˙(8)
整理可得状态方程:
d d t [ y y ˙ ψ ψ ˙ ] = [ 0 1 0 0 0 − 2 C α , f + 2 C α , r m v x 0 − v x − 2 C α , f l f − 2 C α , r l r m v x 0 0 0 1 0 − 2 C α , f l f − 2 C α , r l r I z v x 0 − 2 C α , f l f 2 + 2 C α , r l r 2 I z v x ] [ y y ˙ ψ ψ ˙ ] + [ 0 2 C α , f m 0 2 l f C α , f I z ] δ (9) \frac{d}{dt} \left[\begin{matrix} y \\ \dot{y} \\ \psi \\ \dot{\psi} \end{matrix}\right] = \left[\begin{matrix} 0 & 1 & 0 & 0 \\ 0 & -\frac{2C_{\alpha,f} + 2C_{\alpha,r}}{m v_x} & 0 & -v_x -\frac{2C_{\alpha,f}l_f - 2C_{\alpha,r}l_r}{m v_x} \\ 0 & 0 & 0 & 1 \\ 0 & -\frac{2C_{\alpha,f}l_f-2C_{\alpha,r}l_r}{I_z v_x} & 0 & -\frac{2C_{\alpha,f}l_f^2+2C_{\alpha,r}l_r^2}{I_z v_x}\end{matrix}\right] \left[\begin{matrix} y \\ \dot{y} \\ \psi \\ \dot{\psi} \end{matrix}\right] + \left[\begin{matrix} 0 \\ \frac{2C_{\alpha,f}}{m} \\ 0 \\ \frac{2l_fC_{\alpha,f}}{I_z} \end{matrix}\right] \delta \tag{9} dtd⎣⎢⎢⎡yy˙ψψ˙⎦⎥⎥⎤=⎣⎢⎢⎢⎡00001−mvx2Cα,f+2Cα,r0−Izvx2Cα,flf−2Cα,rlr00000−vx−mvx2Cα,flf−2Cα,rlr1−Izvx2Cα,flf2+2Cα,rlr2⎦⎥⎥⎥⎤⎣⎢⎢⎡yy˙ψψ˙⎦⎥⎥⎤+⎣⎢⎢⎡0m2Cα,f0Iz2lfCα,f⎦⎥⎥⎤δ(9)
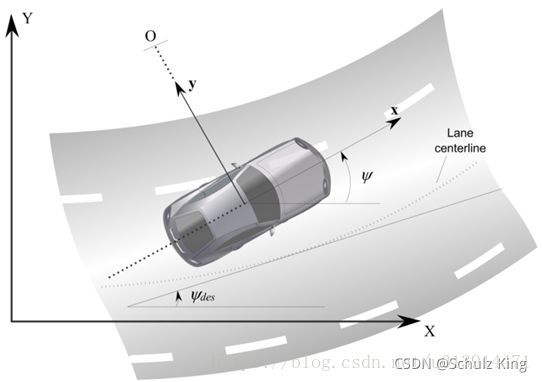
以相对于道路的方向和距离误差为状态变量建立误差动力学模型。假设 e 1 e_1 e1为横向距离误差,车辆质心距离车道中心线的距离, e 2 e_2 e2为航向误差。
假设车辆的纵向速度为 v x v_x vx,匀速平稳,转向半径为 R R R,则车辆转过期望角度所需的角速度为:
ψ ˙ d e s = v x R (10) \dot{\psi}_{des} = \frac{v_x}{R} \tag{10} ψ˙des=Rvx(10)
所需横向加速度为:
a y , d e s = v x 2 R = v x ψ ˙ d e s (11) a_{y,des} = \frac{v_x^2}{R} = v_x \dot{\psi}_{des} \tag{11} ay,des=Rvx2=vxψ˙des(11)
则横向加速度误差为:
e ¨ 1 = a y − a y , d e s = ( y ¨ + v x ψ ˙ ) − v x ψ ˙ d e s = y ¨ + v x ( ψ ˙ − ψ ˙ d e s ) (12) \ddot{e}_1 = a_y - a_{y,des} = (\ddot{y} + v_x \dot{\psi}) - v_x \dot{\psi}_{des} = \ddot{y} + v_x(\dot{\psi} - \dot{\psi}_{des}) \tag{12} e¨1=ay−ay,des=(y¨+vxψ˙)−vxψ˙des=y¨+vx(ψ˙−ψ˙des)(12)
横向速度误差为:
e ˙ 1 = y ˙ + v x ( ψ − ψ d e s ) (13) \dot{e}_1 = \dot{y} + v_x({\psi} - {\psi}_{des}) \tag{13} e˙1=y˙+vx(ψ−ψdes)(13)
航向误差:
e 2 = ψ − ψ d e s (14) e_2 = \psi - \psi_{des} \tag{14} e2=ψ−ψdes(14)
可得误差动力学模型为:
d d t [ e 1 e ˙ 1 e 2 e ˙ 2 ] = [ 0 1 0 0 0 − 2 C α , f + 2 C α , r m v x 2 C α , f + 2 C α , r m − 2 C α , f l f + 2 C α , r l r m v x 0 0 0 1 0 − 2 C α , f l f − 2 C α , r l r I z v x 2 C α , f l f − 2 C α , r l r I z − 2 C α , f l f 2 + 2 C α , r l r 2 I z v x ] [ e 1 e ˙ 1 e 2 e ˙ 2 ] + [ 0 2 C α , f m 0 2 l f C α , f I z ] δ + [ 0 − 2 C α , f l f + 2 C α , r l r m v x − v x 0 − 2 C α , f l f 2 + 2 C α , r l r 2 I z v x ] ψ ˙ d e s (15) \frac{d}{dt} \left[\begin{matrix} e_1 \\ \dot{e}_1 \\ e_2 \\ \dot{e}_2 \end{matrix}\right] = \left[\begin{matrix} 0 & 1 & 0 & 0 \\ 0 & -\frac{2C_{\alpha,f} + 2C_{\alpha,r}}{m v_x} & \frac{2C_{\alpha,f} + 2C_{\alpha,r}}{m} & \frac{-2C_{\alpha,f}l_f + 2C_{\alpha,r}l_r}{m v_x} \\ 0 & 0 & 0 & 1 \\ 0 & -\frac{2C_{\alpha,f}l_f-2C_{\alpha,r}l_r}{I_z v_x} & \frac{2C_{\alpha,f}l_f-2C_{\alpha,r}l_r}{I_z} & -\frac{2C_{\alpha,f}l_f^2+2C_{\alpha,r}l_r^2}{I_z v_x}\end{matrix}\right] \left[\begin{matrix} e_1 \\ \dot{e}_1 \\ e_2 \\ \dot{e}_2 \end{matrix}\right] + \left[\begin{matrix} 0 \\ \frac{2C_{\alpha,f}}{m} \\ 0 \\ \frac{2l_fC_{\alpha,f}}{I_z} \end{matrix}\right] \delta + \left[\begin{matrix} 0 \\ \frac{-2C_{\alpha,f}l_f + 2C_{\alpha,r}l_r}{m v_x} -v_x \\ 0 \\ -\frac{2C_{\alpha,f}l_f^2+2C_{\alpha,r}l_r^2}{I_z v_x} \end{matrix}\right] \dot{\psi}_{des} \tag{15} dtd⎣⎢⎢⎡e1e˙1e2e˙2⎦⎥⎥⎤=⎣⎢⎢⎢⎡00001−mvx2Cα,f+2Cα,r0−Izvx2Cα,flf−2Cα,rlr0m2Cα,f+2Cα,r0Iz2Cα,flf−2Cα,rlr0mvx−2Cα,flf+2Cα,rlr1−Izvx2Cα,flf2+2Cα,rlr2⎦⎥⎥⎥⎤⎣⎢⎢⎡e1e˙1e2e˙2⎦⎥⎥⎤+⎣⎢⎢⎡0m2Cα,f0Iz2lfCα,f⎦⎥⎥⎤δ+⎣⎢⎢⎢⎡0mvx−2Cα,flf+2Cα,rlr−vx0−Izvx2Cα,flf2+2Cα,rlr2⎦⎥⎥⎥⎤ψ˙des(15)