基于目标的激光雷达与相机外参标定方法汇总
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957(请务必按照文章尾部要求备注添加,否则不予通过)。
对于自动驾驶、机器人技术、导航系统和三维场景重建等应用,通常使用激光雷达和相机传感器捕获同一场景的数据。为了准确地重建场景中的对象,有必要将激光雷达和相机输出融合在一起,激光雷达相机外参估计出刚性变换矩阵,旋转+平移、6自由度,该矩阵建立三维激光雷达平面中的点与图像平面中的像素之间的对应关系。
Extrinsic Calibration of a Camera and Laser Range Finder (improves camera calibration), 2004(点到面的优化方式)
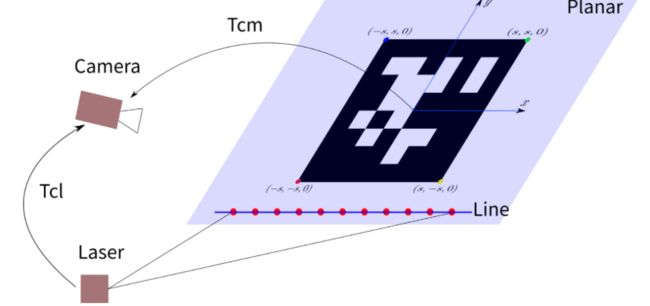
这是一个基于 ROS 的单线激光和相机外参数自动标定文章,标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。

代码:https://github.com/MegviiRobot/CamLaserCalibraTool.git
Fast Extrinsic Calibration of a Laser Rangefinder to a Camera, 2005
激光雷达与相机校准工具箱(LCCT),这是一个基于Matlab的图形用户界面,可用于将相机外参到激光测距仪的简单便携标定技术。
代码:
https://www.cs.cmu.edu/~ranjith/lcct.html
Extrinsic calibration of a 3D laser scanner and an omnidirectional camera, 2010
实现Basler摄像机和Velodyne VLP-32激光雷达之间的标定,所使用的方法相当基础,并适用于任何类型的3D激光雷达和相机。点到面的优化方式
代码:
https://github.com/SubMishMar/cam_lidar_calib.git
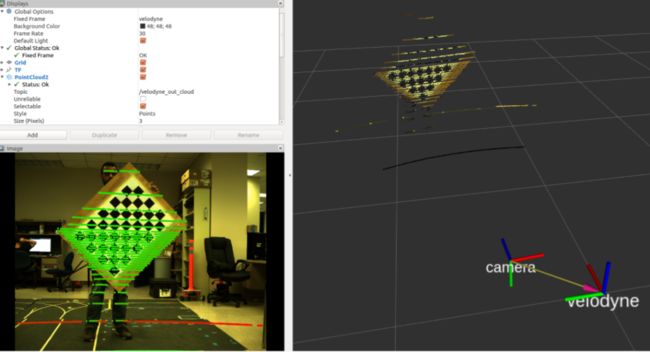
LiDAR-Camera Calibration using 3D-3D Point correspondences, 2017
文章提出了一种新的方案和实验装置,以找到精确的刚体变换,用于激光雷达和相机外参校准。该方案使用激光雷达和相机中的3D-3D点对应,并给出封闭形式的解决方案,该代码以ROS包的形式作为开源软件提供。是一种ICP迭代优化的点对的方式

代码:
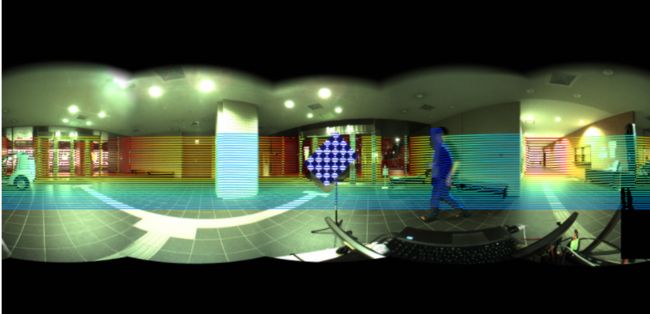
https://github.com/ankitdhall/lidar_camera_calibration.gitReflectance Intensity Assisted Automatic and Accurate Extrinsic Calibration of 3D LiDAR and Panoramic Camera Using a Printed Chessboard, 2017
这是一个python实现开源工具,是基于激光反射强度对3D激光雷达和相机进行全自动和精确的外参校准。此实现的主要功能包括:
Velodyne 3D激光雷达获取的点云自动分割
棋盘的自动检测
棋盘点云的角点自动检测
外参校准的优化
使用VTK python包装器实现三维点云的各种可视化
代码:
Automatic Extrinsic Calibration of a Camera and a 3D LiDAR using Line and Plane Correspondences, 2018
本文提出了一种估计激光雷达和相机之间外参的算法,使用相似性转换可以简化校准过程,因为不需要棋盘的物理尺寸,同时,由于棋盘格尺寸不可避免的测量误差以及将激光雷达测量转换为米制测量的激光雷达固有比例因子,估计比例可以产生更准确的结果。通过仿真和实验验证了算法的有效性。与纯平面算法相比,我们的算法可以通过更少的姿态数获得更精确的结果。
代码:
https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.htmlImprovements to Target-Based 3D LiDAR to Camera Calibration, 2020
摘要:本文提出了一种新的方法来估计激光雷达和相机的外参,与基本的方法对比而言,激光雷达到摄像机的投影误差减少了50%以上,其方差减少了70%,该方法的另外两个优点是:
(1)它不需要从固有噪声点云中估计目标法向量;
(2)它避免了边缘点的识别及其与目标特定侧面的关联,结合较低的均方根误差和方差,我们的结果可能为当前基于目标的外参校准方法提供一种较好的替代方案。

代码:
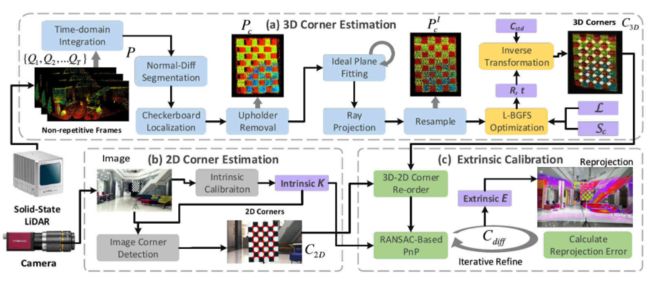
https://github.com/UMich-BipedLab/extrinsic_lidar_camera_calibration.gitACSC: Automatic Calibration for Non-repetitive Scanning Solid-State LiDAR and Camera Systems, 2020
固态激光雷达(SSL)的快速发展使得从环境中低成本、高效率地获取三维点云成为可能,这激发了大量的研究和应用,然而,其扫描方向的不均匀性和测距误差分布的不一致性给其标定任务带来了挑战,在本文提出了一种用于非重复扫描SSL和相机系统的全自动校准方法。
代码
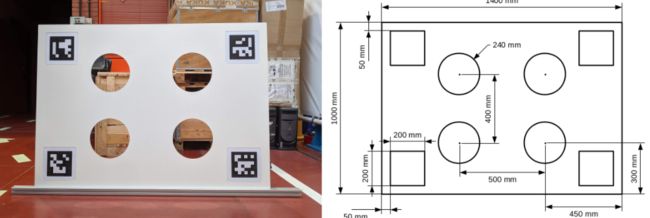
https://github.com/HViktorTsoi/ACSC.gitAutomatic Extrinsic Calibration Method for LiDAR and Camera Sensor Setups, 2021
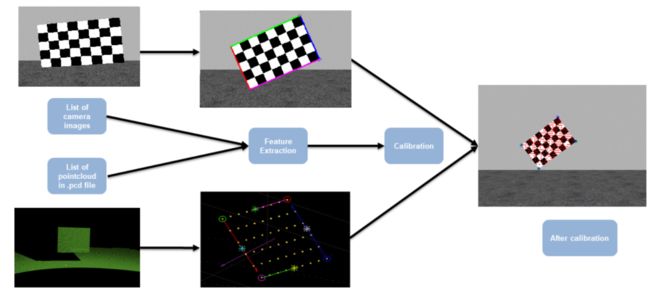
本文提出了一种方法来校准激光雷达、与单目或立体相机的外参方案,该过程分为两个阶段:首先,从待校准传感器提供的数据中提取自定义目标的参考点,然后,通过两个点集的配准找到最佳刚体变换,所提出的方法可以处理具有不同分辨率和位姿的设备。为了评估所提出方法的性能,在一个流行的仿真框架的基础上引入了一个新的评估方法,该校准算法明显优于现有的方法,根据实际数据的测试效果证实了该方法的有效性。
代码:https://github.com/beltransen/velo2cam_calibration.git
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍
扫描下方微信视频号二维码可查看最新研究成果及相关开源方案的演示:
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:[email protected],欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶