【目标检测】|重参数化 ACNET
在模型设计上区分参数和结构
传统方法训练参数即为推理参数,本文使用重参数化网络,通过参数等效转换,将训练的大模型转为小参数。
是ICCV 2019的一个新CNN架构ACNet(全称为Asymmetric Convolution Net)
ACNet的切入点为获取更好的特征表达,但和其它方法最大的区别在于它没有带来额外的超参数,而且在推理阶段没有增加计算量,这是十分具有吸引力的。
通过 一个新型的卷积模块,可以用来替代卷积网络中常规的卷积层
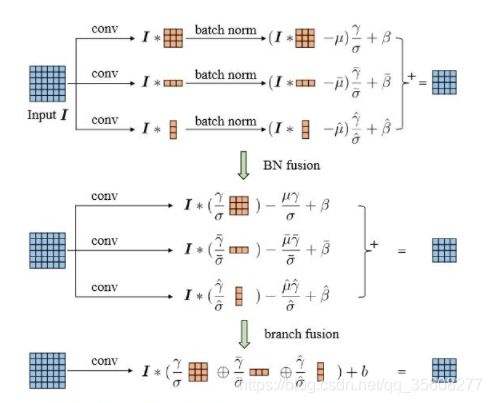
原理:其实原理非常简单。如果你在3x3卷积旁边加上1x3和3x1卷积层,在同样的输入上并行地做3x3, 1x3和3x1卷积,然后将三路的输出加起来,这个过程在数学上等价于,
先将1x3和3x1的卷积核加到3x3上得到一个新的卷积核(设想一下,把一个十字形的补丁给“钉”到3x3卷积核的中间,也就是我们说的kernel skeleton),然后用这个卷积核在同样的输入上进行卷积。注意,由于1x3和3x1卷积核是data-independent的,这个变换可以在训练完成后一步完成,从此以后你部署的模型里就再也见不到1x3和3x1卷积层了,只剩3x3了,也就是说,你最终得到的模型结构跟你只用3x3训练的时候完全一样,因此运行开销也完全一样。等效原理和训练完成后的变换过程如下图所示。注意,这种等效性只是在inference的时候成立的,训练的时候training dynamics是不同的,因而会训出更好的性能。
对于输入特征图I,先进行K(1)和I卷积,K(2)和I卷积后再对结果进行相加,与先进行K(1)和K(2)的逐点相加后再和I进行卷积得到的结果是一致的。
![]()
# 去掉因为3x3卷积的padding多出来的行或者列
class CropLayer(nn.Module):
# E.g., (-1, 0) means this layer should crop the first and last rows of the feature map. And (0, -1) crops the first and last columns
def __init__(self, crop_set):
super(CropLayer, self).__init__()
self.rows_to_crop = - crop_set[0]
self.cols_to_crop = - crop_set[1]
assert self.rows_to_crop >= 0
assert self.cols_to_crop >= 0
def forward(self, input):
return input[:, :, self.rows_to_crop:-self.rows_to_crop, self.cols_to_crop:-self.cols_to_crop]
# 论文提出的3x3+1x3+3x1
class ACBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, padding_mode='zeros', deploy=False):
super(ACBlock, self).__init__()
self.deploy = deploy
if deploy:
self.fused_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=(kernel_size,kernel_size), stride=stride,
padding=padding, dilation=dilation, groups=groups, bias=True, padding_mode=padding_mode)
else:
self.square_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels,
kernel_size=(kernel_size, kernel_size), stride=stride,
padding=padding, dilation=dilation, groups=groups, bias=False,
padding_mode=padding_mode)
self.square_bn = nn.BatchNorm2d(num_features=out_channels)
center_offset_from_origin_border = padding - kernel_size // 2
ver_pad_or_crop = (center_offset_from_origin_border + 1, center_offset_from_origin_border)
hor_pad_or_crop = (center_offset_from_origin_border, center_offset_from_origin_border + 1)
if center_offset_from_origin_border >= 0:
self.ver_conv_crop_layer = nn.Identity()
ver_conv_padding = ver_pad_or_crop
self.hor_conv_crop_layer = nn.Identity()
hor_conv_padding = hor_pad_or_crop
else:
self.ver_conv_crop_layer = CropLayer(crop_set=ver_pad_or_crop)
ver_conv_padding = (0, 0)
self.hor_conv_crop_layer = CropLayer(crop_set=hor_pad_or_crop)
hor_conv_padding = (0, 0)
self.ver_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=(3, 1),
stride=stride,
padding=ver_conv_padding, dilation=dilation, groups=groups, bias=False,
padding_mode=padding_mode)
self.hor_conv = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=(1, 3),
stride=stride,
padding=hor_conv_padding, dilation=dilation, groups=groups, bias=False,
padding_mode=padding_mode)
self.ver_bn = nn.BatchNorm2d(num_features=out_channels)
self.hor_bn = nn.BatchNorm2d(num_features=out_channels)
# forward函数
def forward(self, input):
if self.deploy:
return self.fused_conv(input)
else:
square_outputs = self.square_conv(input)
square_outputs = self.square_bn(square_outputs)
# print(square_outputs.size())
# return square_outputs
vertical_outputs = self.ver_conv_crop_layer(input)
vertical_outputs = self.ver_conv(vertical_outputs)
vertical_outputs = self.ver_bn(vertical_outputs)
# print(vertical_outputs.size())
horizontal_outputs = self.hor_conv_crop_layer(input)
horizontal_outputs = self.hor_conv(horizontal_outputs)
horizontal_outputs = self.hor_bn(horizontal_outputs)
# print(horizontal_outputs.size())
return square_outputs + vertical_outputs + horizontal_outputs
CNet有一个特点是它提升了模型对图像翻转和旋转的鲁棒性,
因此,引入1*3这样的水平卷积核可以提升模型对图像上下翻转的鲁棒性,竖直方向的卷积核同理。
ref
https://zhuanlan.zhihu.com/p/93966695
https://zhuanlan.zhihu.com/p/104114196