基于Pytorch实现的图像分割算法: DeepLabV3+

图1. 基于DeepLabV3+的图像分割结果示意图。
目录
一. 简介
二. 实现细节
三. 项目代码
总结:
Reference
图像分割属于图像处理领域最重要的几个问题之一。随着自动驾驶,广告推荐,手机照片处理,知识图谱等智能应用的快速普及,基于语义分析的图像分割、理解与识别变得越来越重要。近年来比较热的视觉领域工作,很大比重是围绕如何使用大规模数据,结合结构优良的深度网络模型,实现图像分割计算。今天,我们就来学习一项该领域的著名工作(DeepLabV3+)。
一. 简介
DeepLabV3+[1]于2018年由谷歌的研究人员提出。该工作基于DeepLabv3,通过增加一个高效的解码器模块,以获得更加精准的分割边缘。整体上,该项工作基于空间金字塔池化技术,通过融合多种模型的优点,构建了核心网络架构,得到一个性能良好的,基于深度网络结构的编解码器。实验证明,该结构在PASCAL VOC 2012 and Cityscapes测试集上能够得到89.0% and 82.1%的分割精度,同时不需要复杂的预处理过程。该模型包括了一些模块,如在DeepLabV2就使用的空洞空间卷积池化金字塔(Atrous spatial pyramid pooling), Xception model[3] 以及 Depthwise separable convolution (我没有深入研究,但上面两项内容应该是经过谷歌的研究人员优化后的三通道卷积网络结构,有兴趣希望深入了解的同学参看:Depthwise卷积与Pointwise卷积 - 知乎)。

图2. DeepLabV3+结构示意图。
图2展示了DeepLabV3+的基本结构。前两个模块基本继承自DeepLabV3[7],而改进部分主要是在第三个模块里,通过编码模块学到更多的语义信息,然后在解码模块,以一个非常高效的方式将分割边缘通过解码实现恢复。这样使得分割结果的细节更加精确。通过使用空洞卷积(Atro Conv),编码器可以从任意分辨率的数据中提取特征。以上就是DeepLabV3+的基本结构。下面我们就具体看一下该结构的细节内容。
二. 实现细节
DeepLabV3+的核心结构由两个神经网络构成,分别是空间金字塔池化模块[4]和编解码结构[5]。第一个结构用来捕获丰富的语义信息,通过对不同的分辨率进行特征池化来实现,第二个结构用来获得更加准确的边界。在具体实现中,DeepLabV3+应用了几个并行的,伴随不同速率的Atrous convolution,被称为Atrous空间金字塔池化(ASPP), 同时使用PSPNet[6]在不同的网格尺度执行池化运算。作者在介绍中谈到,只使用池化技术,其计算效率,对分辨率的鲁棒性会存在缺陷。但是组合了编解码器,问题会被明显改善。而DeepLabV3+相比DeepLabV3的主要性能提升,就在于引入了编解码器,以解决不同分辨率下的特征抽取精度,获得更好的边界信息,如图2C部分所示。总结本文贡献,包括:提出一个基于DeepLabv3的编解码器;任意的分辨率控制;在分割任务中使用了Xception模型,结合ASPP以及解码模块,建立了效率更高,准确率更好的编解码网络。
注:在我看来,本文的主要贡献就是在特征抽取与分析过程,利用编解码器,解决多分辨率问题,强化了特征精度,以获得更好的分割边界。
基于Atrous Convolution的编解码
Atrous convolution用来精确控制特征的分辨率。该结构通过深度神经网络和调节卷积层的视野,实现对多尺度信息的捕获,建立标准的卷积运算。在二维信号处理中,对于输出特征图y和一个卷积层w的一个位置i,atrous convolution被应用在输入特征图x的对应位置:
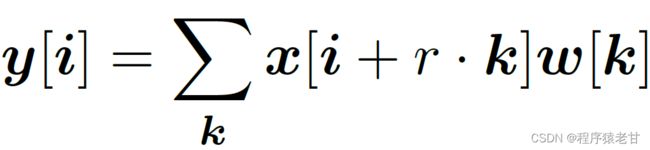
其中,atrous速率r决定我们采样输入信号的步调,更详细的信息参看文献[8]。
Depthwise分离卷积将一个标准卷积分解为Depthwise卷积,结合pointwise卷积,以减少计算开销。在Atrous卷积中引入depthwise卷积,就构成了Atrous depthwise卷积,如图3C所示。这里我没有深入的去研究什么是Depthwise以及Atrous,直观的理解就是一种多尺度卷积方法。

图3. Depthwise分离卷积示意图。
如前所述,DeepLabV3的编码器用以学习语义特征。一般的,最终特征图的空间分辨率要小于输入图像的分辨率(差32倍),即输出步频(Output stride)为32。对于语义分割任务,可以通过移除最后一个或两个block以防止特征压缩,进而输出更低的步频16或8,获得更密的分辨率。本文在最后两个block中实际使用的速率为2和4,对应输出步频为8。这里我没明白rate和Output stride的关系,但是应该是有对应的,整体就是一个特征压缩程度的描述。最终,编码器输出包含256个通道的特征图以及丰富的语义信息。利用Atrous convolution,可以对任意分辨率数据进行特征提取,这依赖于计算开销。
解码器是本文的核心创新点。如图4所示,通过编码器获得的特征,利用双线性上采样首先计算一个4倍的超采,并连接到之前利用1*1卷积(用以减少通道数)获得的低级特征。然后再用一个3*3的卷积来提升特征,再用一个双线性上采样,得到一个新的4倍超采。这里的两次提升用于平衡之前的Output stride。图4展示了整个编解码过程的细节。
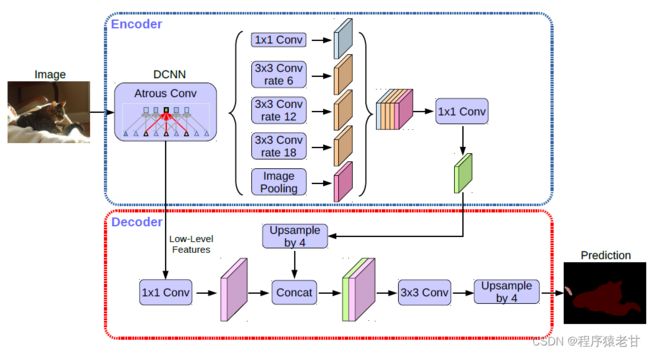
图4. DeepLabV3+的编解码结构。
修改后的 Aligned Xception
Xception model[9] 已经被证明在图像分类任务中的性能。MSRA的团队改善了Xception model,提出Aligned Xception[10]。DeepLabV3对Aligned Xception做了一点调整,以获得更好的效果,包括更深的Xceoption;所有的最大池化操作被替换为跨步的depthwise separable convolution,使得可以利用atrous separable 卷积在任意分辨率提取特征;额外的batch normalization以及ReLU激活被添加到3*3的depthwise卷积,类似于MobileNet[11]的设计。整个结构如图5所示。

图5. Xception model结构。
三. 项目代码
我使用的代码并非原文章提供的代码,而是用pytorch重写的。
项目链接:https://github.com/VainF/DeepLabV3Plus-Pytorch
环境配置:基于Python3.8,requirement包含的相关包为torch, torchvosion, numpy, pillow, pcikit-learn, tqdm, matplotlib, visdom。我在pycharm里没有指定版本,直接就是默认pip安装。我把列表放在这里,供参考。
数据下载:
原始的数据库包括Pascal VOC2012和Cityscapes。可以不用下载原库,而直接使用预训练参数模型, 地址为:
HRNet backbone:谷歌云盘链接
所有预训练模型:腾讯微云网盘链接
程序调用命令:
python predict.py
--input samples/1_image.png #输入图片
--dataset cityscapes #训练数据集,街道cityscapes, 一般图片voc
--model deeplabv3plus_mobilenet #选择网络模型
--ckpt checkpoints/best_deeplabv3plus_mobilenet_cityscapes_os16.pth #选择预训练参数
--save_val_results_to test_results #输出路径网络模型可以参看下表:
| DeepLabV3 | DeepLabV3+ |
|---|---|
| deeplabv3_resnet50 | deeplabv3plus_resnet50 |
| deeplabv3_resnet101 | deeplabv3plus_resnet101 |
| deeplabv3_mobilenet | deeplabv3plus_mobilenet |
| deeplabv3_hrnetv2_48 | deeplabv3plus_hrnetv2_48 |
| deeplabv3_hrnetv2_32 | deeplabv3plus_hrnetv2_32 |
对应的预训练参数文件列表为:

可以看到,网络结构包括resnet50,101和mobilenet。原文章推荐使用mobilenet。
然后我们来看一下预测代码predict.py:
# Set up model (all models are 'constructed at network.modeling)
model = network.modeling.__dict__[opts.model](num_classes=opts.num_classes, output_stride=opts.output_stride)
if opts.separable_conv and 'plus' in opts.model:
network.convert_to_separable_conv(model.classifier)
utils.set_bn_momentum(model.backbone, momentum=0.01)
if opts.ckpt is not None and os.path.isfile(opts.ckpt):
# https://github.com/VainF/DeepLabV3Plus-Pytorch/issues/8#issuecomment-605601402, @PytaichukBohdan
checkpoint = torch.load(opts.ckpt, map_location=torch.device('cpu'))
model.load_state_dict(checkpoint["model_state"])
model = nn.DataParallel(model)
model.to(device)
print("Resume model from %s" % opts.ckpt)
del checkpoint
else:
print("[!] Retrain")
model = nn.DataParallel(model)
model.to(device)
#denorm = utils.Denormalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) # denormalization for ori images
if opts.crop_val:
transform = T.Compose([
T.Resize(opts.crop_size),
T.CenterCrop(opts.crop_size),
T.ToTensor(),
T.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]),
])
else:
transform = T.Compose([
T.ToTensor(),
T.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]),
])
if opts.save_val_results_to is not None:
os.makedirs(opts.save_val_results_to, exist_ok=True)
with torch.no_grad():
model = model.eval()
for img_path in tqdm(image_files):
ext = os.path.basename(img_path).split('.')[-1]
img_name = os.path.basename(img_path)[:-len(ext)-1]
img = Image.open(img_path).convert('RGB')
img = transform(img).unsqueeze(0) # To tensor of NCHW
img = img.to(device)
#这句代码就是输入图像到model里,并输出对应的分割预测结果
pred = model(img).max(1)[1].cpu().numpy()[0] # HW
#这里是我添加的代码。pred存储了针对像素分类的结果
print(np.shape(pred))
#我把预测数据输入到一个txt文件中,以方便其他程序使用
np.savetxt(os.path.join(opts.save_val_results_to, img_name+'.txt'),pred)
colorized_preds = decode_fn(pred).astype('uint8')
colorized_preds = Image.fromarray(colorized_preds)
if opts.save_val_results_to:
colorized_preds.save(os.path.join(opts.save_val_results_to, img_name+'.png'))比较重要语句包括:
#这句代码就是输入图像到model里,并输出对应的分割预测结果
pred = model(img).max(1)[1].cpu().numpy()[0]
#这里是我添加的代码。pred存储了针对像素分类的结果
print(np.shape(pred))
#我把预测数据输入到一个txt文件中,以方便其他程序使用
np.savetxt(os.path.join(opts.save_val_results_to, img_name+'.txt'),pred)TXT 预测结果:

基于像素的分割可视化结果:




总结:
我发现DeepLabV3+的一作Liang-Chieh (Jay) Chen博士确实是个大佬,Google引用4万+,多年来一致深耕语义图像分割领域。最高引用文章为DeepLab[8],1万+。由此可见,坚持不懈,只做一个问题,也能开花结果。这哥们是台湾国立交通大学毕业的,查了一下,该学校理工实力还是蛮强的。联想到之前学习的PointNet的一作也是台湾人,平心一想,觉得台湾的学者还是很厉害的,原创能力和深耕能力都不容小觑。

针对图像语义分割这个研究方向,Liang-Chieh (Jay) Chen博士已经迭代了三个大版本的网络了。到了DeepLabV3+,基本确定了技术路线,大量的工作是在完善之前的模块。以我的看法,之后若想获得更大的进步,还是要引入图网络实现语义交叉感知学习,建立知识图谱向视觉的迁移。多尺度特征学习已经针对图像语义信息描述做到很好的性能了,对于混杂的像素信息,仅凭单对象训练结构,我觉得很难在推进精度。基于上下文的,更复杂的语义结构关联性信息,应该要作为下一代网络的研究重点,以便获得更加鲁棒与精准的分割模型。
Reference
[1] LC. Chen, Y. Zhu, G. Papandreou, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]. Proceedings of the European conference on computer vision (ECCV). 2018: 801-818.
[2] O. Ronneberger, P. Fischer, T. Brox. U-net: Convolutional networks for biomedical image segmentation[C]. International Conference on Medical image computing and computer-assisted intervention. Springer, Cham, 2015: 234-241.
[3] M. Wang, B. Liu, H. Foroosh. Factorized convolutional neural networks[C]. Proceedings of the IEEE International Conference on Computer Vision Workshops. 2017: 545-553.
[4] K. Grauman, T. Darrell. The pyramid match kernel: Discriminative classification with sets of image features. In: ICCV (2005).
[5] V. Badrinarayanan, A. Kendall, R. Cipolla. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. PAMI (2017).
[6] H. Zhao, J. Shi, X. Qi, et al. Pyramid scene parsing network. In: CVPR (2017).
[7] LC. Chen, G. Papandreou, F. Schroff, et al. Rethinking atrous convolution for semantic image segmentation. arXiv:1706.05587 (2017).
[8] LC. Chen, G. Papandreou, I. Kokkinos, et al. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. TPAMI (2017).
[9] F. Chollet. Xception: Deep learning with depthwise separable convolutions. In:CVPR (2017).
[10] H. Qi, Z. Zhang, B. Xiao, et al. Deformable convolutional networks - coco detection and segmentation challenge 2017 entry. ICCV COCO Challenge Workshop (2017).
[11] AG. Howard, M. Zhu, B. Chen, et al. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv:1704.04861 (2017)