Modbus TCP Server端(附超全注释)
实验项目名称 Modbus TCP实验
- 一、实验目的
- 二、实验内容
- 三、实验环境
- 四、设计方案
- 五、实验结果及分析(或设计总结)
- 六、完整代码
-
- 6.1 server.c
- 6.2 respond.c
- 6.3 respond.h
开发语言:C
开发平台:VS2019
开发工具:Visual studio 2019、Modbus/TCP Master
学习Modbus见:Modbus协议中文手册
获取Modbus TCP Master见:Modbus TCP Master
完整代码见文末,我会修改一点内容,请读者自行发现并改正,练习练习动手能力哈。
一、实验目的
熟悉并掌握Modbus协议,能用代码实现基于modbus协议的简单应用。
二、实验内容
(1)编写一个Modbus-TCP程序,用modbus Poll等模拟主站设备。从站设备具有16路DI、16路DO以及16路AI(从站可用曲线模拟)和16路AO(从站可用曲线模拟)。
(2)除了完成过程控制量的数据输入和输出外(使用已有的功能代码完成),还需要完成以下几个功能:
- 提供Modbus TCP的状态检查,检查系统是否正常、每个AI、AO、DI、DO通道是否正常;
- 自定义一个命令,实现对这些AI、AO、DI、DO通道选配,如果本次采集只采集8路DI和8路AO;
- 每次主从通信过程应该包括以下流程:
(1) 首先主站轮询从站的状态;
(2) 接着,从站发出响应,如果是OK,那么执行下一步,否则等待主站下一次轮询状态;
(3) 主站对从站进行配置,配置DI/AI、DO /AO使能、采样周期;
(4) 从站如果响应OK的话,执行下一步,否则等待主站的配置命令;
(5)主站和从站进行数据交换和轮询。
(6) 有通信的结束和退出命令。
三、实验环境
操作系统:Windows10
开发工具:Visual studio 2019、Modbus/TCP Master
四、设计方案
本次实验使用TCP/IP来进行modbus协议的传输,主要使用了windows下的winsock2及其相关静态链接库ws2_32.lib,使用socket(套接字)进行主从机的连接。
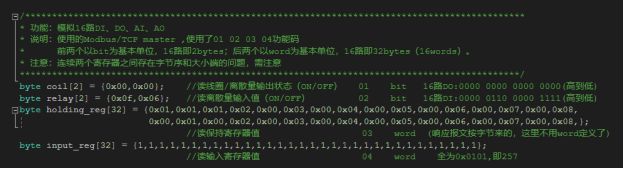
连接前,先进行从机(server)自检,检查AI、AO、DI、DO的数据是否已经准备好。我在从机部分用四个数组代替AI、AO、DI、DO,如图所示,所以自检OK。
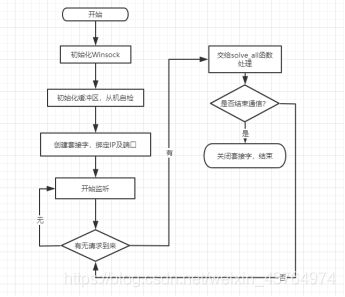
自检完成后,创建从机套接字,并将其与使用的电脑当前IPV4地址和相关端口进行绑定。绑定后将绑定状态输出到控制台。
接着进入监听状态,当有主机连接进来时在控制台打印连接成功的信息。使用accept()函数阻塞程序运行,直到新的请求到来。每次将新的请求放入缓冲区(请求队列),处理完毕后再从缓冲区读取请求,并在while循环中,使用solve_all(SOCKET clnSock, byte request[])函数来判断请求的类型,并转到相应的处理函数。处理完后重置相应的缓冲区。solve_all()函数的实现如下。

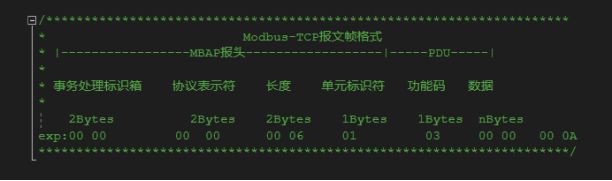
注:由于modbus
tcp的报文帧格式如下,所以通过switch语句判断缓冲区的第8位:buff[7],即可直到功能码的类型。在这里,我只简单实现了01、02、03、04功能码,其他功能码类似,有一些在RTU中做了实现。
这里再简单看一个功能码的实现,完整程序见附录或者压缩包。以01功能码为例进行说明:由于我将AI、AO、DI、DO都设置为16路,而DI、DO是以位为基本单位读写,而AI、AO是以字(这里是16位)为基本单位读写的,所以对于DI、DO的byte型数组只需要2个元素,而后者则需要32个元素。
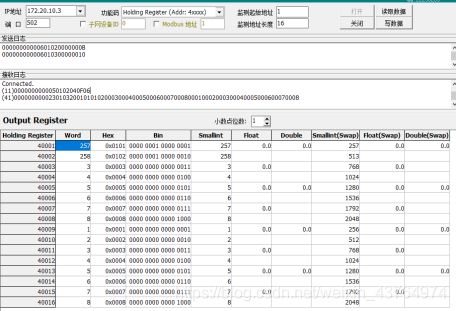
01功能码是读线圈/离散量的输出状态即ON/OFF。先通过报文的第12位(实际应该是第11、12个字节,但这里只用了16路,所以第11个字节为0x00,不予考虑)判断要读取的点的个数,再确定要返回的字节数,当读取的点数不超过8就返回一个字节,否则返回2个字节数据。相应的,还需要修改返回报文的第六位即这一位后面的字节数。除此之外,请求和响应的前8个字节是相同的。而响应报文的第九位是数据区的字节长度,即程序中的n,要说明的是在使用modbus tcp master软件测试时需要将n乘以2才能正确显示。再将第九位后面的区域填充为数据即可。最后用send()函数返回响应,同时在控制台输出请求、响应的内容。

整个程序的流程图如下:
五、实验结果及分析(或设计总结)
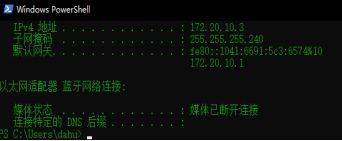
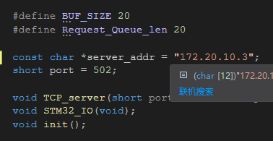
(1)先查看本机IP地址,在程序中修改为今天的IP。
(2)功能码测试
未连接时:

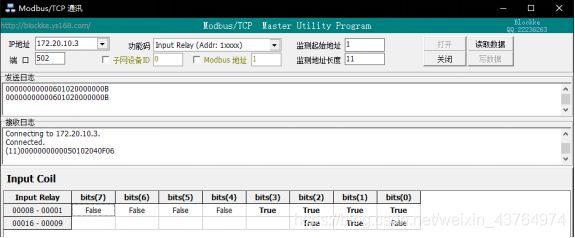
02功能码:

03功能码:

01与02,03与04相似,此处不再贴图。
六、完整代码
6.1 server.c
/*
* File_name:server.c
* Author:dahu
* Description:modbus tcp socket主要实现源文件
* Time:2021-04-21
* encoding:UTF-8
* Version:1.0
*/
/*********************************************************************
* Modbus-TCP报文帧格式
* |-----------------MBAP报头------------------|-----PDU-----|
*
* 事务处理标识箱 协议表示符 长度 单元标识符 功能码 数据
*
2Bytes 2Bytes 2Bytes 1Bytes 1Bytes nBytes
exp:00 00 00 00 00 06 01 03 00 00 00 0A
**********************************************************************/
#include6.2 respond.c
/*
* File_name:respond.c
* Author:dahu
* Description:定义了不同功能码的响应函数
* Time:2021-04-21
* encoding:UTF-8
* Version:1.0
*/
#include6.3 respond.h
#pragma once
#include