GRU是什么?RNN、LSTM分别是什么?
前言
最近在学习图神经网络(GNN)的过程中,遇到很多不懂的地方,深度学习的基础没有掌握好。最早的GNN网络(详情见GNN)可以被用于处理有环图、有向图或无向图。然而,GNN网络本身必须使整个网络达到不动点之后才可以进行计算。针对这一问题,通过将GRU引入到网络结构中,进一步提出了GGNN网络(详情见GGNN)。那么,现在就介绍一下GRU是什么东西。
GRU中的G不是Graph,而是Gate,全称是Gate Recurrent Unit(门循环单元),它是循环神经网络(Recurrent Neural Network, RNN)的一种。和LSTM(Long-Short Term Memory)一样,也是为了解决长期记忆和反向传播中的梯度等问题而提出来的。在R-NET: MACHINE READING COMPREHENSION WITH SELF-MATCHING NETWORKS(2017)文章中提出
![]()
译:我们在我们的实验中选择GRU是因为它的实验效果与LSTM相似,但是更易于计算。
相比LSTM,使用GRU能够达到相当的效果,并且相比之下更容易进行训练,能够很大程度上提高训练效率,因此很多时候会更倾向于使用GRU。在介绍GRU之前,先介绍一下RNN和LSTM。
RNN
循环神经网络(Recurrent Neural Network,RNN)是一种用于处理序列数据的神经网络。相比一般的神经网络来说,它能够处理序列变化的数据。比如某个单词的意思会受上文提到的内容的影响,RNN就能够很好地解决这类问题。
其主要形式如下图所示(台大李宏毅教授的PPT):
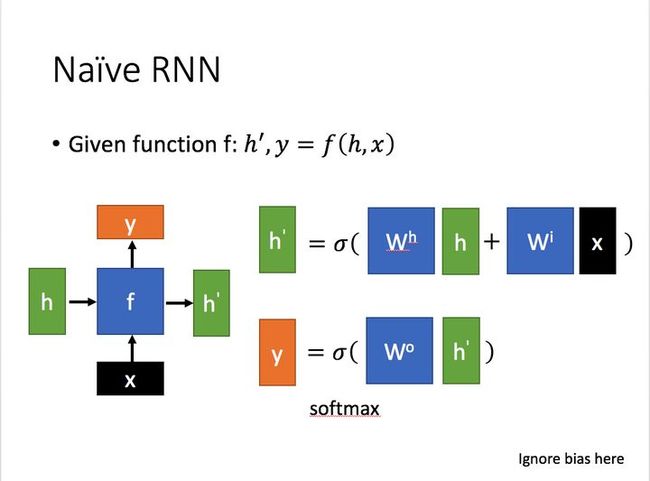
这里:
![]() 为当前时刻的输入特征,
为当前时刻的输入特征,![]() 表示上一时刻存储的状态信息。
表示上一时刻存储的状态信息。 ![]() 为当前节点状态下的输出,而
为当前节点状态下的输出,而 ![]() 为传递到下一时刻存储的状态信息。通过上图的公式可以看到,状态信息h' 与 当前时刻的输入特征 x 和上一时刻的状态信息 h 的值都相关。而 y 则常常使用 h' 投入到一个线性层(主要是进行维度映射),然后使用softmax进行分类得到需要的数据。对这里的 y 如何通过 h' 计算得到往往看具体模型的使用方式。
为传递到下一时刻存储的状态信息。通过上图的公式可以看到,状态信息h' 与 当前时刻的输入特征 x 和上一时刻的状态信息 h 的值都相关。而 y 则常常使用 h' 投入到一个线性层(主要是进行维度映射),然后使用softmax进行分类得到需要的数据。对这里的 y 如何通过 h' 计算得到往往看具体模型的使用方式。
第一个激活函数通常用tanh,第二个激活函数用softmax。
前向传播时:记忆体内存储的状态信息
,在每个时刻都被刷新,三个参数矩阵
自始至终都是固定不变的。
反向传播时:三个参数矩阵
通过序列形式的输入,我们能够得到如下形式的RNN:
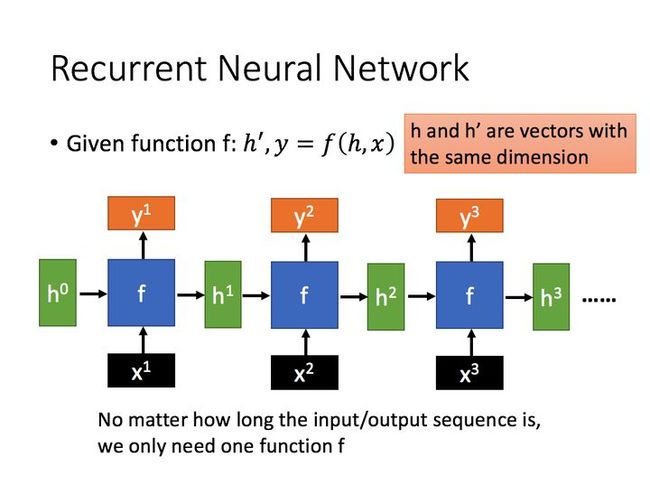
上图中一共有三个循环核(循环计算层)
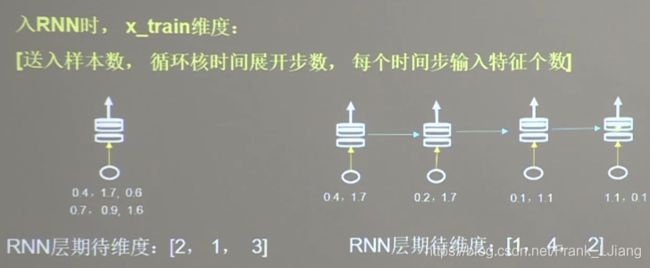
在TensorFlow中,对于RNN输入必须是三个维度,分别是样本的总数,循环核时间展开步数(循环核个数),每个时间步输入的特征个数。如上图所示。
下面给出一个例子:
input_word = "abcde"
w_to_id = {'a': 0, 'b': 1, 'c': 2, 'd': 3, 'e': 4} # 单词映射到数值id的词典
id_to_onehot = {0: [1., 0., 0., 0., 0.], 1: [0., 1., 0., 0., 0.], 2: [0., 0., 1., 0., 0.], 3: [0., 0., 0., 1., 0.],
4: [0., 0., 0., 0., 1.]} # id编码为one-hot
x_train = [id_to_onehot[w_to_id['a']], id_to_onehot[w_to_id['b']], id_to_onehot[w_to_id['c']],
id_to_onehot[w_to_id['d']], id_to_onehot[w_to_id['e']]]
y_train = [w_to_id['b'], w_to_id['c'], w_to_id['d'], w_to_id['e'], w_to_id['a']]# 使x_train符合SimpleRNN输入要求:[送入样本数, 循环核时间展开步数, 每个时间步输入特征个数]。
# 此处整个数据集送入,送入样本数为len(x_train);输入1个字母出结果,循环核时间展开步数为1; 表示为独热码有5个输入特征,每个时间步输入特征个数为5
x_train = np.reshape(x_train, (len(x_train), 1, 5))
y_train = np.array(y_train)
# 模型 循环核时间展开步数为1
model = tf.keras.Sequential([
SimpleRNN(3),
Dense(5, activation='softmax')
])
LSTM
长短期记忆(Long short-term memory, LSTM)是一种特殊的RNN,主要是为了解决长序列训练过程中的梯度消失和梯度爆炸问题。简单来说,就是相比普通的RNN,LSTM能够在更长的序列中有更好的表现。
传统的循环神经网络RNN可以通过记忆体实现短期记忆进行连续数据的预测,但是当连续数据的序列变长时,会使展开时间步过长,在反向传播更新参数时,梯度要按照时间步连续相乘,很容易导致梯度消失,所以LSTM就出现了。
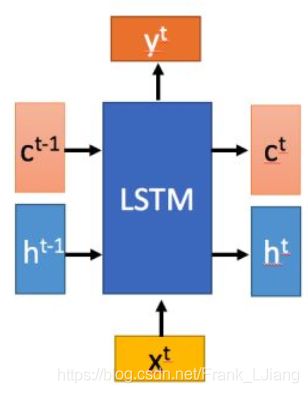
LSTM结构(图右)和普通RNN的主要输入输出区别如下所示:

相比RNN只有一个传递状态 ![]() ,LSTM有两个传递状态,一个
,LSTM有两个传递状态,一个 ![]() (cell state,细胞态,长期记忆),和一个
(cell state,细胞态,长期记忆),和一个 ![]() (hidden state,隐态,记忆体,短期记忆)。(Tips:RNN中的
(hidden state,隐态,记忆体,短期记忆)。(Tips:RNN中的 ![]() 对于LSTM中的
对于LSTM中的 ![]() ) 。其中对于传递下去的
) 。其中对于传递下去的 ![]() 改变得很慢,通常输出的
改变得很慢,通常输出的 ![]() 是上一个状态传过来的
是上一个状态传过来的 ![]() 加上一些数值,而
加上一些数值,而 ![]() 则在不同节点下往往会有很大的区别。
则在不同节点下往往会有很大的区别。
下面具体对LSTM的内部结构来进行剖析:
首先使用LSTM的当前输入 ![]() 和上一个状态传递下来的
和上一个状态传递下来的 ![]() 拼接训练得到四个状态。
拼接训练得到四个状态。
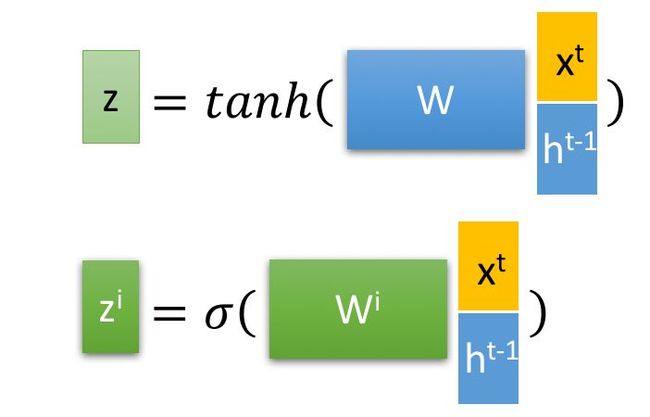
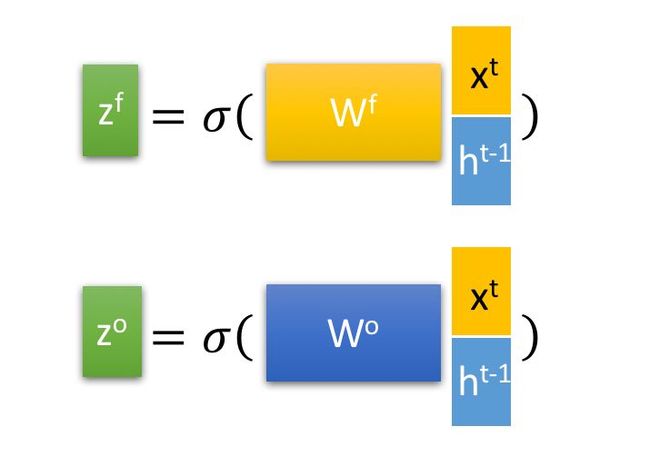
其中, ![]() 是由拼接向量乘以权重矩阵之后,再通过一个
是由拼接向量乘以权重矩阵之后,再通过一个 ![]() 激活函数转换成0到1之间的数值,来作为一种门控状态,分别表示:
激活函数转换成0到1之间的数值,来作为一种门控状态,分别表示:
 表示输入门,
表示输入门, 表示遗忘门,
表示遗忘门, 表示输出门。
表示输出门。
而 ![]() 则是将结果通过一个
则是将结果通过一个 ![]() 激活函数将转换成-1到1之间的值(这里使用
激活函数将转换成-1到1之间的值(这里使用 ![]() 是因为这里是将其做为输入数据,而不是门控信号),
是因为这里是将其做为输入数据,而不是门控信号), 表示候选态,由上一时刻的短期记忆
表示候选态,由上一时刻的短期记忆  和 当前时刻的输入特征
和 当前时刻的输入特征  决定。
决定。
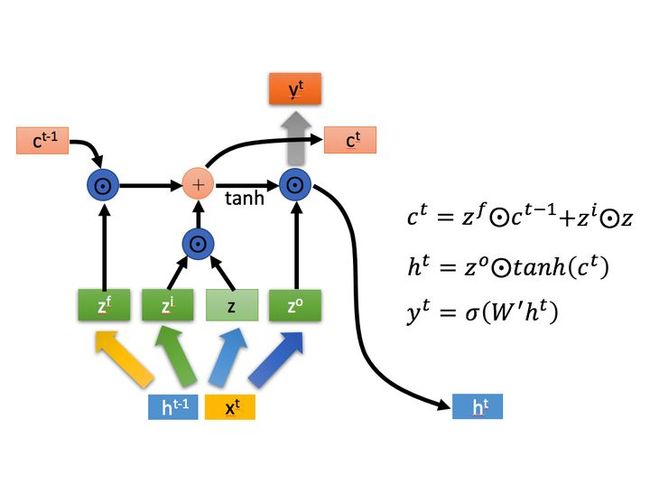
![]() (cell state,细胞态,长期记忆),
(cell state,细胞态,长期记忆), ![]() (hidden state,记忆体,短期记忆)
(hidden state,记忆体,短期记忆)
![]() 是Hadamard Product,也就是操作矩阵中对应的元素相乘,因此要求两个相乘矩阵是同型的。
是Hadamard Product,也就是操作矩阵中对应的元素相乘,因此要求两个相乘矩阵是同型的。 ![]() 则代表进行矩阵加法。
则代表进行矩阵加法。
LSTM内部主要有三个阶段:
1. 遗忘门。这个阶段主要是对上一个节点传进来的输入进行选择性遗忘。简单来说就是会 “忘记不重要的,记住重要的”。
具体来说是通过计算得到的 ![]() (f表示forget)来作为忘记门控,来控制上一个状态的
(f表示forget)来作为忘记门控,来控制上一个状态的 ![]() 哪些需要留哪些需要忘。
哪些需要留哪些需要忘。
2. 输入门。这个阶段将这个阶段的输入有选择性地进行“记忆”。主要是会对输入 ![]() 进行选择记忆。哪些重要则着重记录下来,哪些不重要,则少记一些。当前的输入内容由前面计算得到的
进行选择记忆。哪些重要则着重记录下来,哪些不重要,则少记一些。当前的输入内容由前面计算得到的 ![]() 表示。而选择的门控信号则是由
表示。而选择的门控信号则是由 ![]() (i代表input)来进行控制。
(i代表input)来进行控制。
将上面两步得到的结果相加,即可得到传输给下一个状态的。也就是上上图中的第一个公式。
3. 输出门。这个阶段将决定哪些将会被当成当前状态的输出。主要是通过  来进行控制的。并且还对上一阶段得到的
来进行控制的。并且还对上一阶段得到的  进行了放缩(通过一个tanh激活函数进行变化)。
进行了放缩(通过一个tanh激活函数进行变化)。
与普通RNN类似,输出
往往最终也是通过
变化得到。
以上,就是LSTM的内部结构。通过门控状态来控制传输状态,记住需要长时间记忆的,忘记不重要的信息;而不像普通的RNN那样只能够“呆萌”地仅有一种记忆叠加方式。对很多需要“长期记忆”的任务来说,尤其好用。但也因为引入了很多内容,导致参数变多,也使得训练难度加大了很多。因此很多时候我们往往会使用效果和LSTM相当但参数更少的GRU来构建大训练量的模型。
思考:加入这么多门控信息,真的会起作用吗???这些门控机制都是通过反向传播学习的,真的会学到吗???
例子:
# 测试集变array并reshape为符合RNN输入要求:[送入样本数, 循环核时间展开步数, 每个时间步输入特征个数]
x_test, y_test = np.array(x_test), np.array(y_test)
x_test = np.reshape(x_test, (x_test.shape[0], 60, 1))
model = tf.keras.Sequential([
LSTM(80, return_sequences=True), # 每个时间步都输出h_t
Dropout(0.2),
LSTM(100), # 只在最后时间步输出h_t
Dropout(0.2),
Dense(1)
])GRU
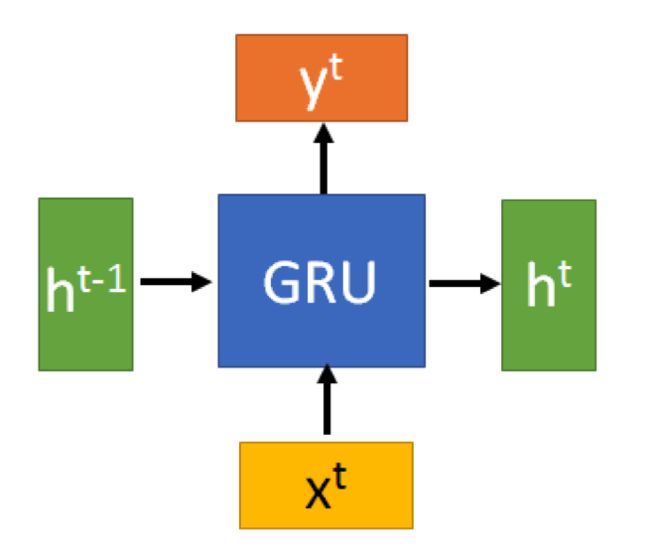
GRU的输入输出结构与普通的RNN是一样的,它的提出是为了解决LSTM计算过于复杂的问题。有一个当前的输入  ,和上一个节点传递下来的隐状态(hidden state)
,和上一个节点传递下来的隐状态(hidden state) ![]() ,这个隐状态包含了之前节点的相关信息。结合
,这个隐状态包含了之前节点的相关信息。结合 ![]() 和
和 ![]() ,GRU会得到当前隐藏节点的输出
,GRU会得到当前隐藏节点的输出 ![]() 和传递给下一个节点的隐状态
和传递给下一个节点的隐状态 ![]() 。
。
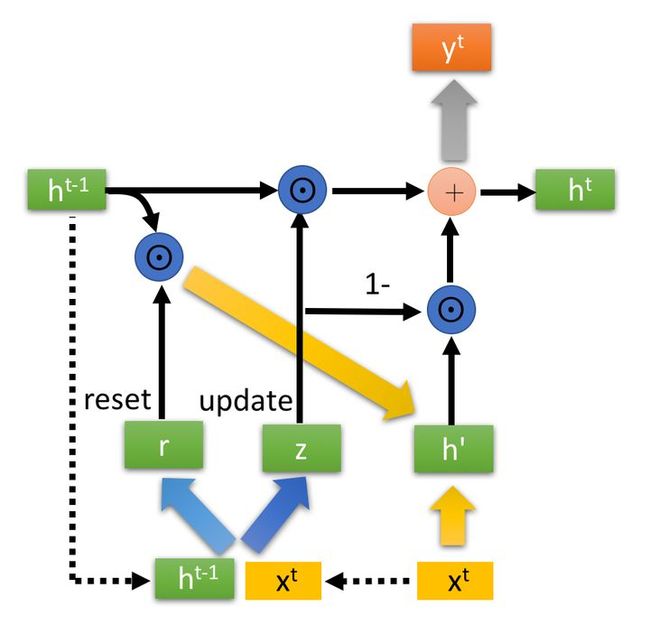
那么,GRU到底有什么特别之处呢?下面来对它的内部结构进行分析!
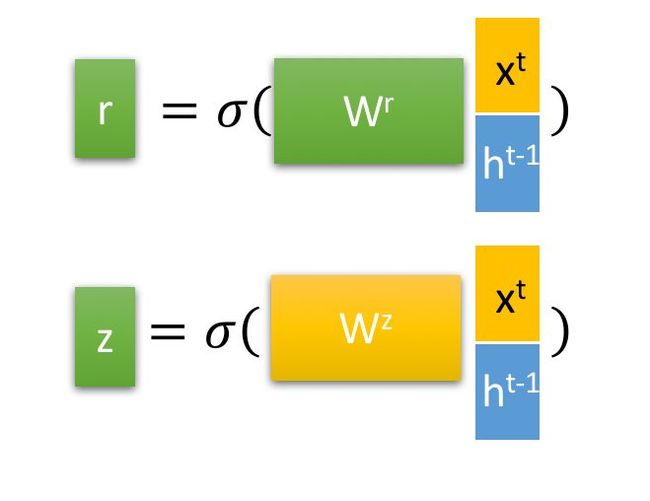
首先,我们先通过上一个传输下来的状态 ![]() 和当前节点的输入
和当前节点的输入 ![]() 来获取两个门控状态。如下图所示,其中
来获取两个门控状态。如下图所示,其中 ![]() 控制重置的门控(reset gate),
控制重置的门控(reset gate), ![]() 为控制更新的门控(update gate)。
为控制更新的门控(update gate)。
Tips:
为sigmoid函数,通过这个函数可以将数据变换为0-1范围内的数值,从而来充当门控信号。
与LSTM分明的层次结构不同,得到门控信号之后,首先使用重置门控来得到“重置”之后的数据
![]()
再将 ![]() 与输入
与输入 ![]() 进行拼接,再通过一个tanh激活函数来将数据放缩到-1~1的范围内。即得到如下图所示的
进行拼接,再通过一个tanh激活函数来将数据放缩到-1~1的范围内。即得到如下图所示的 ![]() 。
。

这里的 ![]() 主要是包含了当前输入的
主要是包含了当前输入的 ![]() 数据。有针对性地对
数据。有针对性地对 ![]() 添加到当前的隐藏状态。
添加到当前的隐藏状态。
是Hadamard Product,也就是操作矩阵中对应的元素相乘,因此要求两个相乘矩阵是同型的。
则代表进行矩阵加法操作。
最后介绍GRU最关键的一个步骤,我们可以称之为”更新记忆“阶段。在这个阶段,我们同时进行了遗忘和记忆两个步骤。我们使用了先前得到的更新门控 ![]() (update gate)。
(update gate)。![]() 相当于遗忘门,1-z 相当于输入门
相当于遗忘门,1-z 相当于输入门
更新表达式: ![]()
首先再次强调一下,门控信号(这里的 ![]() )的范围为0~1。门控信号越接近1,代表”记忆“下来的数据越多;而越接近0则代表”遗忘“的越多。
)的范围为0~1。门控信号越接近1,代表”记忆“下来的数据越多;而越接近0则代表”遗忘“的越多。
GRU很聪明的一点就在于,使用了同一个门控 ![]() ,即同时可以进行遗忘和记忆(LSTM则要使用多个门控)。
,即同时可以进行遗忘和记忆(LSTM则要使用多个门控)。
 :表示对原本隐藏状态的选择性“遗忘”。这里的
:表示对原本隐藏状态的选择性“遗忘”。这里的  可以想象成遗忘门(forget gate),忘记
可以想象成遗忘门(forget gate),忘记  维度中一些不重要的信息。
维度中一些不重要的信息。 : 表示对包含当前节点信息的
: 表示对包含当前节点信息的  进行选择性”记忆“。与上面类似,这里的
进行选择性”记忆“。与上面类似,这里的  同理会记住
同理会记住 中重要的,忘记 维度中的一些不重要的信息。或者,这里我们更应当看做是对
中重要的,忘记 维度中的一些不重要的信息。或者,这里我们更应当看做是对  维度中的某些信息进行选择。
维度中的某些信息进行选择。 :结合上述,这一步的操作就是忘记传递下来的
:结合上述,这一步的操作就是忘记传递下来的  中的某些维度信息,并加入当前节点输入的某些维度信息。
中的某些维度信息,并加入当前节点输入的某些维度信息。
可以看到,这里的遗忘和选择
是联动的。也就是说,对于传递进来的维度信息,我们会进行选择性遗忘,则遗忘了多少权重 (
),我们就会使用包含当前输入的
中所对应的权重进行弥补
。以保持一种“ 恒定”状态。
# 测试集变array并reshape为符合RNN输入要求:[送入样本数, 循环核时间展开步数, 每个时间步输入特征个数]
x_test, y_test = np.array(x_test), np.array(y_test)
x_test = np.reshape(x_test, (x_test.shape[0], 60, 1))
model = tf.keras.Sequential([
GRU(80, return_sequences=True),
Dropout(0.2),
GRU(100),
Dropout(0.2),
Dense(1)
])LSTM与GRU的关系
GRU是在2014年提出来的,而LSTM是1997年。他们的提出都是为了解决相似的问题,那么GRU难免会参考LSTM的内部结构。那么他们之间的关系大概是怎么样的呢?这里简单介绍一下。大家看到 ![]() (reset gate)实际上与他的名字有点不符。我们仅仅使用它来获得了
(reset gate)实际上与他的名字有点不符。我们仅仅使用它来获得了 ![]() 。那么这里的
。那么这里的 ![]() 实际上可以看成对应于LSTM中的hidden state;上一个节点传下来的
实际上可以看成对应于LSTM中的hidden state;上一个节点传下来的  则对应于LSTM中的cell state。z 对应的则是LSTM中的
则对应于LSTM中的cell state。z 对应的则是LSTM中的 ![]() forget gate,那么
forget gate,那么 ![]() 我们似乎就可以看成是选择门
我们似乎就可以看成是选择门 ![]() 了。
了。
总结
GRU输入输出的结构与普通的RNN相似,其中的内部思想与LSTM相似。与LSTM相比,GRU内部少了一个”门控“,参数比LSTM少,但是却也能够达到与LSTM相当的功能。考虑到硬件的计算能力和时间成本,因而很多时候我们也就会选择更加“实用”的GRU啦。
RNN
【翻译】理解 LSTM 网络