智能车调试上位机(PyQt5)
概括:
此上位机16届比赛期间针对全国智能车比赛车模调试写的。简单介绍,一下把,繁琐类的工作,大家学学都会,现在把他开源了。
软件的截图如下,分为四个板块:
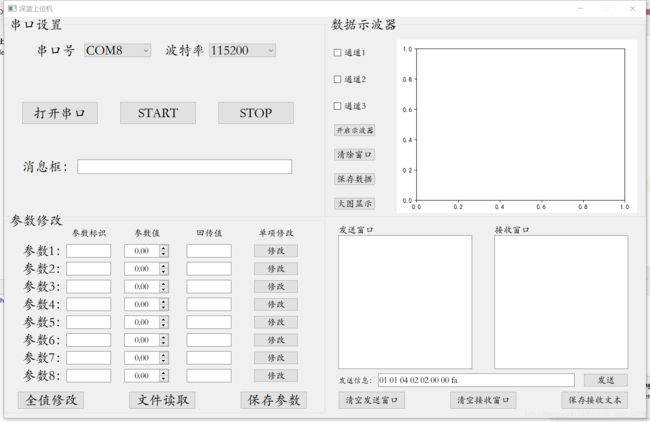
第一板块:串口设置,一些指令发送按键。
第二板块:参数调试按钮。
第三板块:一些回传的数据的示波器。
第四板块:发送信息窗口,接收信息窗口等但这个板块的东西容易引发bug我就把他屏蔽了。
协议介绍:
这个上是我基于逐飞科技的无线转串口做的一个上位机,我采用了八字节的数据包。如下,这是第一板块和第二板块:
| 板块地址 1 | 指令地址1 | 数据4 | 空闲1 | 尾部1 |
|---|
板块地址 指令地址 数据位 空闲 尾部
(第三板块的数据是只有下位机回传的,所以会有所不同)
板块地址:对应与当前信息是那个板块的,比如第一板块就是01,第二板块就是02,第三板块就是03。(这里第一板块和第二板块都是上位机和下位机互传,上位机发什么,下位机就会回传什么,如果没回传,证明下位机没有成功接收,回传后上位机也会有一些显示。)
指令地址:对应板块,不同的按键指令,比如第一板块的打开串口是01。Start是02,Stop是03。
数据:那就是数据了,这里的数据都是浮点数,单片机的浮点数都是用32位二进制数据表示的。解码很简单。
空闲:留着没用的。
尾部:0xfa,都是这个。
各个按钮功能的详细介绍:
打开串口:必须选对串口后打开,否则会闪退(对不起,我的问题,但我就不改),点击此按钮后,此按钮的文本会变成关闭串口,发送数据如下:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 01 | 01 | 04 02 02 00 | 00 | fa |
关闭串口:没啥,就是关闭串口。
Start:点击此按钮后发送数据如下:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 01 | 02 | 04 02 02 00 | 00 | fa |
Stop:点击此按钮后发送数据如下:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 01 | 03 | 04 02 02 00 | 00 | fa |
参数一修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 01 | XX XX XX XX | 00 | fa |
数据就是前面的参数值转换成float值,转换成32位的二进制数据。
参数二修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 02 | XX XX XX XX | 00 | fa |
参数三修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 03 | XX XX XX XX | 00 | fa |
参数四修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 04 | XX XX XX XX | 00 | fa |
参数五修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 05 | XX XX XX XX | 00 | fa |
参数六修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 06 | XX XX XX XX | 00 | fa |
参数7修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 07 | XX XX XX XX | 00 | fa |
参数8修改按钮:
| 板块地址 | 指令地址 | 数据位 | 空闲 | 尾部 |
|---|---|---|---|---|
| 02 | 08 | XX XX XX XX | 00 | fa |
下位机接收到参数修改的信息后都会将信息回传回来,然后会显示在回转值的文本框。如果没有就多按几次。
全值修改:将板块二的参数信息全部发送一编给下位机。
文件读取:读取excel表格的数据,将其填入,参数值的数据框,和参数标识的文本框。
保存参数:将当前第二板块的参数保存进excel文件中。
通道1:打开示波器的通道一
通道2:打开示波器的通道二
通道3:打开示波器的通道三
开启示波器:打开示波器。
清除窗口:清除缓存中接收的数据,并清除绘图窗口。
保存数据:将当前接收的数据保存至excel文件中。
大图显示:开启另一个可调节窗口显示数据波形。
第三板块数据回传协议:
第三板块只从下位机接收回传,接收的数据类型只有int16,数据就收格式如下:
| 板块地址 | 通道一数据 | 通道二数据 | 通道三数据 | 尾部 |
|---|---|---|---|---|
| 03 | XX XX | XX XX | XX XX | fa |
下位机介绍:
逐飞的串口中断修改如下:
#define WIRELESS_BUFFER_SIZE 8
extern uint8 wireless_rx_buffer[WIRELESS_BUFFER_SIZE];
extern uint16 wireless_rx_index;
uint8 wireless_rx_buffer[WIRELESS_BUFFER_SIZE];
uint16 wireless_rx_index = 0;
uint8 loss_pack_flag = 0;
void wireless_uart_callback()
{
if(loss_pack_flag == 0)
{
wireless_rx_buffer[wireless_rx_index++] = (uart_index[WIRELESS_UART])->RDR & 0x01FF;
if(wireless_rx_index == WIRELESS_BUFFER_SIZE)
{
wireless_rx_index = 0;
if(wireless_rx_buffer[7]==0xfa)receive_func();
else loss_pack_flag = 1;
}
}
else
{
uint8 tmp;
tmp = (uart_index[WIRELESS_UART])->RDR & 0x01FF;
if(tmp == 0xFA) loss_pack_flag = 0;
}
}
下位机接收处理函数如下:
#define SEND_LEN 8
extern uint8 send_array[SEND_LEN];
extern uint8 data_index;
uint8 send_array[SEND_LEN];
uint8 data_index=0;
//-------------------------------------------------------------------------------------------------------------------
// @brief 添加数据回传头
// @param data 数据
// @return void NULL
// Sample usage:
//-------------------------------------------------------------------------------------------------------------------
void add_data_head()
{
send_array[0] = 0x03;
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 添加数据回传尾
// @param data 数据
// @return void NULL
// Sample usage:
//-------------------------------------------------------------------------------------------------------------------
void add_data_rear()
{
send_array[7] = 0xfa;
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 添加回传数据
// @param data 数据
// @return void NULL
// Sample usage:
//-------------------------------------------------------------------------------------------------------------------
void add_data(uint8 channel,int16 data)
{
uint8 tmp;
if(channel == 1)
{
tmp = data;
send_array[2] = tmp;
tmp = data>>8;
send_array[1] = tmp;//这里是将int16类型的数据存放到两个无符号八位数据中的处理方式。
}
if(channel == 2)
{
tmp = data;
send_array[4] = tmp;
tmp = data>>8;
send_array[3] = tmp;
}
if(channel == 3)
{
tmp = data;
send_array[6] = tmp;
tmp = data>>8;
send_array[5] = tmp;
}
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 加入一个uint8类型的数据
// @param data 数据
// @return void NULL
// Sample usage: add_int8(data)
//-------------------------------------------------------------------------------------------------------------------
void add_int8(uint8 data)
{
uint8 tmp;
tmp = data;
send_array[data_index++] = tmp;
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 加入一个int16类型的数据
// @param data 数据
// @return void NULL
// Sample usage: add_int16(data)
//-------------------------------------------------------------------------------------------------------------------
void add_int16(int16 data)
{
uint8 tmp;
tmp = data;
send_array[data_index++] = tmp;
tmp = data>>8;
send_array[data_index++] = tmp;
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 加入一个float类型的数据
// @param data 数据
// @return void NULL
// Sample usage: add_float(data)
//-------------------------------------------------------------------------------------------------------------------
void add_float(float data)
{
uint8 i;
float floatVariable=data;
uint8 charArray[4];
uint8 *pdata = (unsigned char*)&floatVariable; //把float类型的指针强制转换为unsigned char型
for(i=0;i<4;i++)
{
charArray[i] = *pdata++;//把相应地址中的数据保存到unsigned char数组中
send_array[data_index++] = charArray[i];
}
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 发送数据
// @param NULL
// @return void NULL
// Sample usage: add_float(data)
//-------------------------------------------------------------------------------------------------------------------
void send_data()
{
// if(data_index==SEND_LEN)data_index=0;
// else {while(1);}
seekfree_wireless_send_buff(send_array,SEND_LEN);
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 接收板块1处理函数
// @param NULL
// @return void NULL
// Sample usage: back01_receive_func()
//-------------------------------------------------------------------------------------------------------------------
void back01_receive_func()
{
switch(wireless_rx_buffer[1])
{
case 1:
break;
case 2:
start = 1;
break;
case 3:
start = 0;
break;
default:
break;
}
seekfree_wireless_send_buff(wireless_rx_buffer,8);
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 接收板块1处理函数
// @param NULL
// @return void NULL
// Sample usage: back01_receive_func()
//-------------------------------------------------------------------------------------------------------------------
void back02_receive_func()
{
float receive_value;
*((char *)(&receive_value)) = wireless_rx_buffer[5];
*((char *)(&receive_value) + 1) = wireless_rx_buffer[4];
*((char *)(&receive_value) + 2) = wireless_rx_buffer[3];
*((char *)(&receive_value) + 3) = wireless_rx_buffer[2];
switch(wireless_rx_buffer[1])//代表当前接收到的数据是哪一个参数,序号相对应
{
case 1:
para1 = receive_value;//左边是你要修改的变量
break;
case 2:
para2 = receive_value;
break;
case 3:
para3 = receive_value;
break;
case 4:
para4 = receive_value;
break;
case 5:
para5 = receive_value;
break;
case 6:
para6 = receive_value;
break;
case 7:
para7 = receive_value;
break;
case 8:
para8 = receive_value;
break;
default:
break;
}
seekfree_wireless_send_buff(wireless_rx_buffer,8);
}
//-------------------------------------------------------------------------------------------------------------------
// @brief 接收处理函数
// @param NULL
// @return void NULL
// Sample usage: receive_func()
//-------------------------------------------------------------------------------------------------------------------
void receive_func()
{
switch (wireless_rx_buffer[0])
{
case 1:
back01_receive_func();
break;
case 2:
back02_receive_func();
break;
case 3:
break;
default:
break;
}
}
回传需要到示波器的数据用法如下:
add_data_head();//加入数据头0x03
add_data(1,Angle_Final);//将Angle_Final加入第一通道
add_data(2,euler_angle);//将euler_Final加入第二通道
add_data(3,icm_gyro_y);//将icm_gyro_y加入第三通道
add_data_rear();//加入数据尾0xfa
send_data();//发送数据。
下位机我只是复制了一下关键代码,大家看一下自已也应该写的出来,我不保证我的复制过去就可以编译过。
由于不知道是我无线转串口的模块的问题,还是我的代码问题,那些修改参数,Start,Stop指令不一定一点就接收成功,需要多点几次,所以大家救车的时候一定要狂点Stop。