雷达系统分析的MATLAB仿真
clear all
mu_o = pi*4.0e-7; % free space permeability
epsilon_o = 8.854e-12; % free space permittivity
c = 1.0/sqrt(mu_o * epsilon_o); % speed of light
length_x = 2.0; % x-width of region
nx = 200; % number of x grid points
dx = length_x / (nx - 1); % x grid size
x = linspace(0.0, length_x, nx); % x array
length_y = 2.0; % y-width of region
ny = 200; % number of y grid points
dy = length_y / (ny - 1); % y grid size
y = linspace(0.0, length_y, ny); % y array
max_timestep = c*sqrt(1.0/(dx*dx) + 1.0/(dy*dy)); % max tstep for FDTD
max_timestep = 1.0/max_timestep;
delta_t = 0.5*max_timestep; % delta t a little less than max tstep
er = 8.0; % relative permittivity of slab
epsilon = epsilon_o*ones(ny, nx); % epsilon array
mu = mu_o*ones(ny - 1, nx - 1); % mu array
a1 = [0.5 1.5 1.5 0.5 0.5]; % for drawing slab on plot
a2 = [0.6 0.6 0.8 0.8 0.6]; % for drawing slab on plot
x1 = fix(0.5/dx)+1; % grid extents for slab
y1 = fix(0.6/dy); % grid extents for slab
x2 = fix(1.5/dx)+1; % grid extents for slab
y2 = fix(0.8/dy); % grid extents for slab
epsilon(y1:y2,x1:x2) = er*epsilon_o; % set epsilon inside slab
j_x = nx/2; % x location of current source
j_y = ny/2; % y location of current source
e_z_1 = zeros(ny, nx); % initialize array. e_z at boundaries will remain 0
h_x_1 = zeros(ny - 1, nx - 1); % initialize array
h_y_1 = zeros(ny - 1, nx - 1); % initialize array
e_z_2 = zeros(ny, nx); % initialize array. e_z at boundaries will remain 0
h_x_2 = zeros(ny - 1, nx - 1); % initialize array
h_y_2 = zeros(ny - 1, nx - 1); % initialize array
ntim = 300; % number of desired time points
f_o = 600e6; % base frequency for pulse
tau = 1.0/(4.0*pi*f_o); % tau for pulse
for i_t = 1:ntim
time(i_t) = i_t * delta_t;
i_t
time(i_t)
if time(i_t) > 3.36e-9
break
end
jz(i_t) = (4.0 * (time(i_t)/tau)^3 - (time(i_t)/tau)^4) * exp(-time(i_t)/tau);
for i_x = 2:nx-1 % ez at boundaries remains zero
for i_y = 2:ny-1 % ez at boundaries remains zero
j = 0.0;
if i_x == j_x
if i_y == j_y
j = jz(i_t);
end
end
if rem(i_t, 2) == 1
a = 1.0/dx*(h_y_1(i_y, i_x) - h_y_1(i_y, i_x - 1));
b = 1.0/dy*(h_x_1(i_y, i_x) - h_x_1(i_y - 1, i_x));
e_z_2(i_y, i_x) = e_z_1(i_y, i_x) + (delta_t/epsilon(i_y, i_x))*(a - b) - j;
else
a = 1.0/dx*(h_y_2(i_y, i_x) - h_y_2(i_y, i_x - 1));
b = 1.0/dy*(h_x_2(i_y, i_x) - h_x_2(i_y - 1, i_x));
e_z_1(i_y, i_x) = e_z_2(i_y, i_x) + (delta_t/epsilon(i_y, i_x))*(a - b) - j;
end
end
end
for i_x = 1:nx-1
for i_y = 1:ny-1
if rem(i_t, 2) == 1
h_x_2(i_y, i_x) = h_x_1(i_y, i_x) - (delta_t/mu(i_y, i_x)/dy)*(e_z_2(i_y + 1, i_x) - e_z_2(i_y, i_x));
h_y_2(i_y, i_x) = h_y_1(i_y, i_x) + (delta_t/mu(i_y, i_x)/dx)*(e_z_2(i_y, i_x + 1) - e_z_2(i_y, i_x));
else
h_x_1(i_y, i_x) = h_x_2(i_y, i_x) - (delta_t/mu(i_y, i_x)/dy)*(e_z_1(i_y + 1, i_x) - e_z_1(i_y, i_x));
h_y_1(i_y, i_x) = h_y_2(i_y, i_x) + (delta_t/mu(i_y, i_x)/dx)*(e_z_1(i_y, i_x + 1) - e_z_1(i_y, i_x));
end
end
end
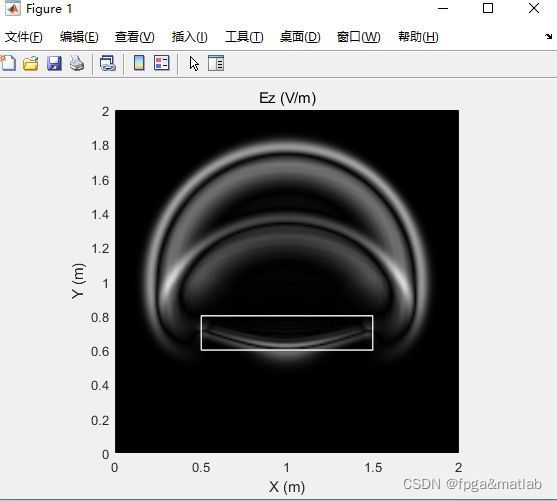
pcolor(x, y, abs(e_z_2))
line(a1, a2, 'Linewidth', 1.0, 'Color', 'white');
xlabel('X (m)')
ylabel('Y (m)')
title('Ez (V/m)')
axis square
shading interp
colormap gray
caxis([0 .1])
%axis([0 2 0 2 0 .1])
fr(i_t) = getframe;
end
D153