ORB-SLAM2的安装与运行(Ubuntu18.04)
目录
目录
1.实验环境
2.安装步骤
2.1安装必要的库和依赖
3.结果
4.附录(碰到的错误)
4.1 Panlogin版本装错怎么办
4.1.1卸载Pangolin(新安装跳过此步)
4.1.2新安装或重新安装Pangolin
5.如果还没解决请参考以下文章和视频
1.实验环境
使用vmware安装虚拟机:ubuntu18.04(注进不去github需要开飞机chang)
2.安装步骤
2.1安装必要的库和依赖
(1)更新apt库,更新软件列表
sudo apt-get update(2)安装git,用于从Github上克隆项目到本地
sudo apt-get install git(3)安装cmake,用于程序的编译
sudo apt-get install cmake(4)安装Pangolin 作为可视化和用户界面
注意: 需安装0.5版本的Pangolin,若安装最新版会在SLAM项目build时出现 cannot find -lEigen3::Eigen 的报错。
直接在Ubuntu中打开链接(或者你再windows下载好文件拖到ubuntu里)
https://github.com/stevenlovegrove/Pangolin/releases/tag/v0.5安装后解压,再输入以下命令完成编译安装:
cd Pangolin-0.5
mkdir build
cd build
cmake ..
make –j
sudo make install(5)安装OpenCV ,用于处理图像和特征
我使用的是OpenCV 3.4.10版本,在虚拟机中进入opencv官网下载Sources,2或3任意版本都可(或者在windows下载好拖进去)
https://opencv.org/releases/
然后解压,进行编译安装
cd ~/opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release –D CMAKE_INSTALL_PREFIX=/usr/local ..
make
sudo make install
opencv初次编译会花费很长时间,耐心等待。
(6)安装Eigen3
sudo apt-get install libeigen3-dev
(8)安装ORB-SLAM2
1.克隆仓库
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
为了避免编译时出现usleep的错误,相应文件添加 #include
/src/LocalMapping.cc
/src/System.cc
/src/LoopClosing.cc
/src/Tracking.cc
/src/Viewer.cc
/Examples/Monocular/mono_tum.cc
/Examples/Monocular/mono_kitti.cc
/Examples/Monocular/mono_euroc.cc
/Examples/RGB-D/rgbd_tum.cc
/Examples/Stereo/stereo_kitti.cc
/Examples/Stereo/stereo_euroc.cc2.编译 找到ORB_SLAM2文件终端进到里边
cd ORB_SLAM2
chmod +x build.sh
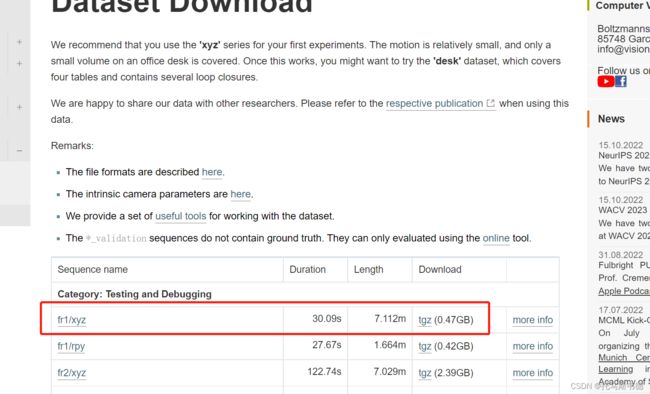
./build.sh3.下载数据集
我使用的是TUM数据集,在
http://vision.in.tum.de/data/datasets/rgbd-dataset/download
下载rgbd_dataset_freiburg1_xyz即可,
需cd 到ORB_SLAM2里运行
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml PATH_TO_SEQUENCE_FOLDER我是这样放的文件
我的命令是再ORB_SLAM2输下面的命令
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml ../rgbd_dataset_freiburg1_xyz/
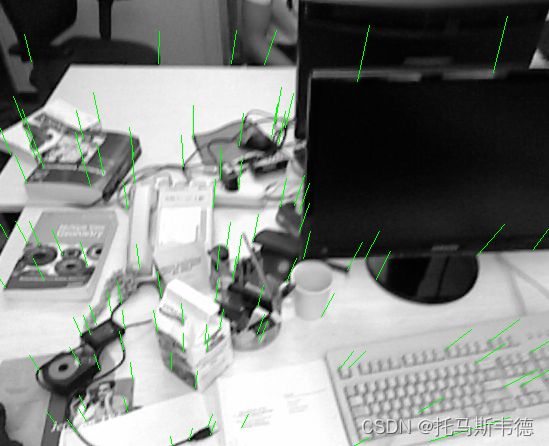
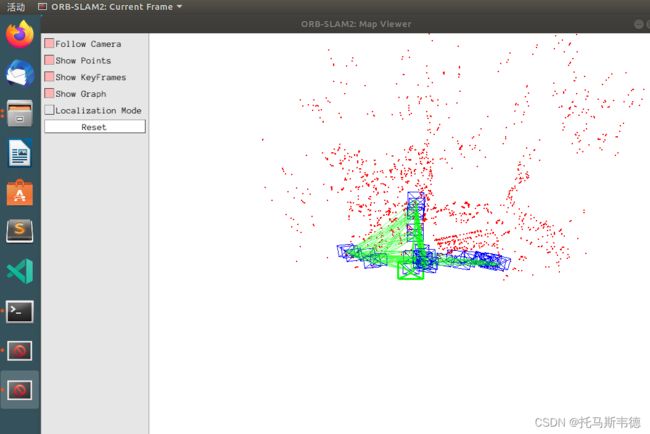
3.结果
4.附录(碰到的错误)
4.1 Panlogin版本装错怎么办
如果你没安装对Panlogin可能会出现找不到那个文件之类的错误,记得安装0.5版本(如果你安装过panlogin但是是其他版本可以这样卸载)
4.1.1卸载Pangolin(新安装跳过此步)
如果你在上次安装时没有执行
sudo make install
上一条命令可能会出现错误。
那么直接执行以下即可(上一条命令成功也需要执行以下过程),
首先删除Pangolin文件夹
再进入/usr/local/include查看是否有Pangolin相关的文件夹,一并删除(只删除文件夹名字为Pangolin的,不确定的请勿删除)
4.1.2新安装或重新安装Pangolin
依赖项安装
sudo apt-get install libxkbcommon-dev
sudo apt-get install wayland-protocols
以避免遇到问题如,No package 'xkbcommon’, No package ‘wayland-protocols’ found。
打开此链接(我给的是v0.6稳定版,经测试可以使用)
点这里下载Release v0.5 · stevenlovegrove/Pangolin · GitHub
将以此链接下载好的Pangolin放置在主目录中(注意文件夹应更名为Pangolin-0.5)。
在此目录下打开终端
sudo apt install libglew-dev
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make install5.如果还没解决请参考以下文章和视频
ORB-SLAM2的安装与运行_ydongy的博客-CSDN博客_orbslam2安装运行ORB-SLAM2的安装与运行1.实验环境使用vmware安装虚拟机:ubuntu18.042.安装步骤2.1安装必要的库和依赖(1)更新apt库,更新软件列表sudo apt-get update(2)安装git,用于从Github上克隆项目到本地sudo apt-get install git(3)安装cmake,用于程序的编译sudo apt-get install cmake(4)安装Pangolin 作为可视化和用户界面注意: 需安装0.5版本的Pangolin,若安https://blog.csdn.net/qq_51645628/article/details/123263013?spm=1001.2014.3001.5506
ubuntu安装opencv的正确方法_普通网友的博客-CSDN博客_opencv ubuntu本文介绍的是如何安装ubuntu下C++接口的opencv1.安装准备:1.1安装cmakesudo apt-get install cmake1.2依赖环境sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev lib...https://blog.csdn.net/public669/article/details/99044895?spm=1001.2014.3001.5506
Ubuntu20.04环境下ORBSLAM2安装参考_MFL_xiaotaiye的博客-CSDN博客_orbslam2安装内容如题。https://blog.csdn.net/MFL_xiaotaiye/article/details/122338614?spm=1001.2014.3001.5506
3.opencv-3.4.1_哔哩哔哩_bilibili https://www.bilibili.com/video/BV1hQ4y127xJ/?p=4&vd_source=e10baaadfbb9422cda2a8b620f7f985e
https://www.bilibili.com/video/BV1hQ4y127xJ/?p=4&vd_source=e10baaadfbb9422cda2a8b620f7f985e
ORB-SLAM2配置过程与/usr/bin/ld: 找不到 -lEigen3::Eigen的解决方法_Quentin_HIT的博客-CSDN博客_卸载pangolin1.安装工具在配置过程中需要cmake、gcc、g++和Git工具。可在终端通过以下命令下载。sudo apt-get install cmakesudo apt-get install gitsudo apt-get install gcc g++2.安装Eigen库通过以下命令来安装Eigen库(版本:3.3.7):sudo apt-get install libeigen3-dev3. 安装PangolinPangolin是对OpenGL进行封装的轻...https://blog.csdn.net/qq_29931565/article/details/120860674?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166953255716800184188702%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=166953255716800184188702&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-1-120860674-null-null.142%5Ev66%5Econtrol,201%5Ev3%5Econtrol_1,213%5Ev2%5Et3_control1&utm_term=%E6%89%BE%E4%B8%8D%E5%88%B0%20-lEigen3%3A%3AEigen&spm=1018.2226.3001.4187
ROS melodic 安装运行 ORB_SLAM2过程及遇到的问题与解决_张余恒的博客-CSDN博客_rosrun orb_slam2出错一、安装Pangolin库安装依赖sudo apt-get install libpython2.7-dev下载 Pangolin库git clone https://github.com/stevenlovegrove/Pangolin.git源码编译进入Pangolin文件夹,使用如下命令进行编译:mkdir buildcd buildcmake ..makesudo make install执行cmake ..指令时,可能会出现提示Could NOT findhttps://blog.csdn.net/weixin_45168199/article/details/107106811?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166953415016782390567336%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=166953415016782390567336&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-1-107106811-null-null.142%5Ev66%5Econtrol,201%5Ev3%5Econtrol_1,213%5Ev2%5Et3_control1&utm_term=bash%3A%20ORB_SLAM2%2FExamples%2FMonocular%2Fmono_tum%3A%20%E6%B2%A1%E6%9C%89%E9%82%A3%E4%B8%AA%E6%96%87%E4%BB%B6%E6%88%96%E7%9B%AE%E5%BD%95&spm=1018.2226.3001.4187笔记本 Ubuntu 16.04 单目ORB_SLAM2 + ROS + usb_cam 环境的搭建与实现(地图的构建)_等南風起的博客-CSDN博客文章目录:1 系统和摄像头准备1.1 首先更新apt库1.2 安装git1.3 安装cmake2 安装Eigen3 安装Pangolin3.1 安装OpenGL的依赖3.2 别的一些库3.3 下载Pangolin4 安装OpenCV5 安装BLAS and LAPACK库6 下载ORB_SLAM27 下载数据集(Monocular Example...https://blog.csdn.net/qq_39397000/article/details/83745332?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166953415016782390567336%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=166953415016782390567336&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-2-83745332-null-null.142%5Ev66%5Econtrol,201%5Ev3%5Econtrol_1,213%5Ev2%5Et3_control1&utm_term=bash%3A%20ORB_SLAM2%2FExamples%2FMonocular%2Fmono_tum%3A%20%E6%B2%A1%E6%9C%89%E9%82%A3%E4%B8%AA%E6%96%87%E4%BB%B6%E6%88%96%E7%9B%AE%E5%BD%95&spm=1018.2226.3001.4187