Pytorch实战 | P9 YOLOv5-Backbone模块实现天气识别
● 本文为365天深度学习训练营 中的学习记录博客
● 参考文章:Pytorch实战 | 第P9天:YOLOv5-Backbone模块
● 原作者:K同学啊|接辅导、项目定制
一、我的环境
● 语言环境:Python3.8
● 编译器:pycharm
● 深度学习环境:Pytorch
● 数据来源:链接: https://pan.baidu.com/s/1SEfd8mvWt7BpzmWOeaIRkQ 提取码: gdie
二、代码实现
1、mian.py
# -*- coding: utf-8 -*-
import copy
import torch.utils.data
from torchvision import datasets, transforms
from model import train1, test1, YOLOv5f_backbone
import torch.nn as nn
# 一、导入和转换数据
img_path = './data/'
# 加载数据
train_transforms = transforms.Compose([
transforms.Resize([224, 224]),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
])
total_data = datasets.ImageFolder(img_path, transform=train_transforms)
# 训练数据和测试数据切分
train_size = int(len(total_data) * 0.8)
test_size = len(total_data) - train_size
train_data, test_data = torch.utils.data.random_split(total_data, [train_size, test_size])
# 按批次处理
batch_size = 4
train_dl = torch.utils.data.DataLoader(train_data, batch_size=batch_size, shuffle=True)
test_dl = torch.utils.data.DataLoader(test_data, batch_size=batch_size, shuffle=True)
# 二、模型网络结构 model.py
# 三、训练函数 model.py train1()和test1()函数
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print('using:{}'.format(device))
model = YOLOv5f_backbone().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
loss_fn = nn.CrossEntropyLoss()
epochs = 60
train_loss = []
test_loss = []
train_acc = []
test_acc = []
best_acc = 0
best_model = None
for epoch in range(epochs):
model.train()
epoch_train_acc, epoch_train_loss = train1(train_dl, model, loss_fn, optimizer, device)
model.eval()
epoch_test_acc, epoch_test_loss = test1(test_dl, model, loss_fn, device)
# 保存最佳模型到best_model
if epoch_test_acc > best_acc:
best_acc = epoch_test_acc
best_model = copy.deepcopy(model)
train_acc.append(epoch_train_acc)
train_loss.append(epoch_train_loss)
test_acc.append(epoch_test_acc)
test_loss.append(epoch_test_loss)
lr = optimizer.state_dict()['param_groups'][0]['lr']
template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}, Test_loss:{:.3f}, Lr:{:.2E}')
print(
template.format(epoch + 1, epoch_train_acc * 100, epoch_train_loss, epoch_test_acc * 100, epoch_test_loss, lr))
model_path = './model/model.pth'
torch.save(best_model.state_dict(), model_path)
print('Done!')
# 四、模型评估
import matplotlib.pyplot as plt
# 隐藏警告
import warnings
warnings.filterwarnings("ignore") # 忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.dpi'] = 100 # 分辨率
epochs_range = range(epochs)
plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)
plt.plot(epochs_range, train_acc, label='Training Accuracy')
plt.plot(epochs_range, test_acc, label='Test Accuracy')
plt.legend(loc='lower right')
plt.title('Training and Validation Accuracy')
plt.subplot(1, 2, 2)
plt.plot(epochs_range, train_loss, label='Training Loss')
plt.plot(epochs_range, test_loss, label='Test Loss')
plt.legend(loc='upper right')
plt.title('Training and Validation Loss')
plt.show()
2、model.py
# -*- coding: utf-8 -*-
import warnings
import torch.nn.functional as F
import torch.nn as nn
import torch
def autopad(k, p=None):
# Pad to 'same
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
# Standard convolution
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super(Conv, self).__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
def forward(self, x):
return self.act(self.bn(self.conv(x)))
class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class C3(nn.Module):
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super(C3, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
a = self.m(self.cv1(x))
b = self.cv2(x)
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))
class SPPF(nn.Module):
def __init__(self, c1, c2, k=5):
super(SPPF, self).__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * 4, c2, 1, 1)
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore')
y1 = self.m(x)
y2 = self.m(y1)
return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
class YOLOv5f_backbone(nn.Module):
def __init__(self):
super(YOLOv5f_backbone, self).__init__()
self.Conv_1 = Conv(3, 64, 3, 2, 2)
self.Conv_2 = Conv(64, 128, 3, 2)
self.C3_3 = C3(128, 128)
self.Conv_4 = Conv(128, 256, 3, 2)
self.C3_5 = C3(256, 256)
self.Conv_6 = Conv(256, 512, 3, 2)
self.C3_7 = C3(512, 512)
self.Conv_8 = Conv(512, 1024, 3, 2)
self.C3_9 = C3(1024, 1024)
self.SPPF = SPPF(1024, 1024, 5)
self.classifier = nn.Sequential(
nn.Linear(in_features=65536, out_features=100),
nn.ReLU(),
nn.Linear(in_features=100, out_features=4)
)
def forward(self, x):
x = self.Conv_1(x)
x = self.Conv_2(x)
x = self.C3_3(x)
x = self.Conv_4(x)
x = self.C3_5(x)
x = self.Conv_6(x)
x = self.C3_7(x)
x = self.Conv_8(x)
x = self.C3_9(x)
x = self.SPPF(x)
x = torch.flatten(x, start_dim=1)
x = self.classifier(x)
return x
def train1(dataloader, model, fn_loss, optimizer, device):
size = len(dataloader.dataset)
batch_num = len(dataloader)
train_loss, train_acc = 0, 0
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model(X)
loss = fn_loss(pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
train_acc += (pred.argmax(1) == y).type(torch.float).sum().item()
train_loss += loss.item()
train_acc /= size
train_loss /= batch_num
return train_acc, train_loss
def test1(dataloader, model, fn_loss, device):
size = len(dataloader.dataset)
num_batchs = len(dataloader)
test_acc, test_loss = 0, 0
# 当不训练时停止梯度更新
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model(X)
loss = fn_loss(pred, y)
test_loss += loss.item()
test_acc += (pred.argmax(1) == y).type(torch.float).sum().item()
test_acc /= size
test_loss /= num_batchs
return test_acc, test_loss
三、遇到的主要问题
1、把__init__写成了__int__,报错TypeError: init() takes 1 positional argument but 3 were given,找了半天才发现问题
2、forward写成了farward,导致报错
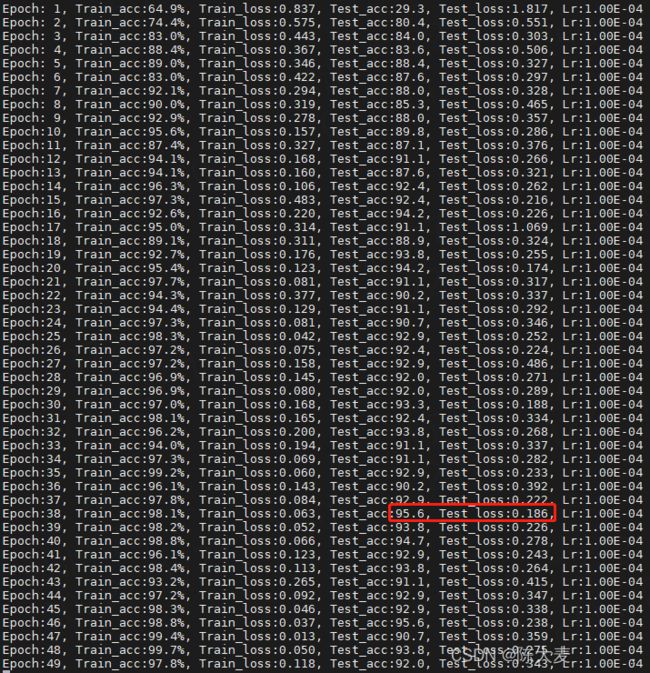
3、最终跑的结果