Qt+OpenGL进阶教学之三维模型读取
Qt+OpenGL进阶教学之三维模型读取
基于Qt+OpenGL的UR3机械臂仿真与控制系统(三)
综述:本文介绍了如何读取一个.obj文件并将其用OpenGL绘制出来
机械臂模型转.OBJ
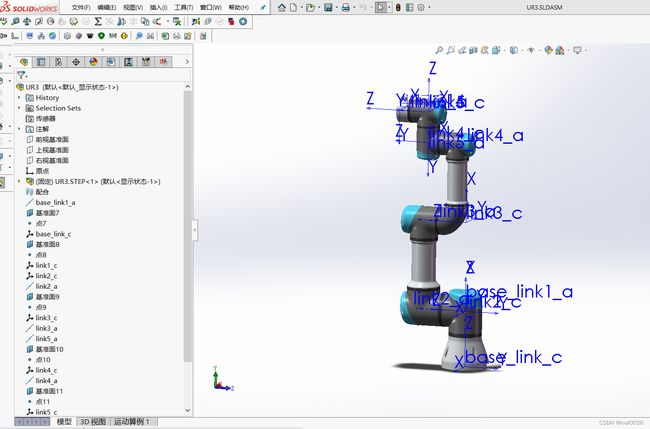
用到的模型文件可以在UR3机器人的官方网站上下载,一般下载的模型文件是.STEP文件或者是.SLDSAM格式,使用SOLIDWORKS打开下载的模型文件,同时需要安装SW的插件,插件安装参考。环境配置好后还是用SW打开模型文件,按照建立的DH参数模型在模型中建立参考坐标系、基准轴。建好后如下图所示
点击工具–>Tools–>“Export as URDF”,按照机器人的构型选定每一个link包含的模型部分、参考坐标系和参考基准轴如下图。
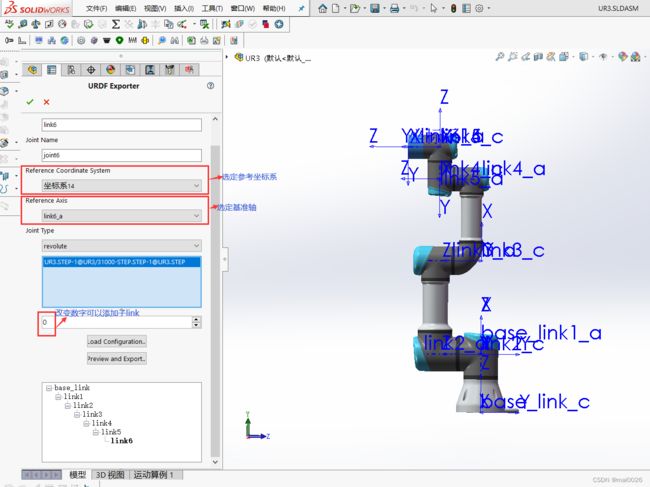
最重要的设置是参考坐标系与基准轴,这将直接决定导出的模型的参考坐标系
设置完后点击Preview and Export导出模型,直接点next然后Export如下图,此时已经将机械臂模型按照每一个link导出为多个stl文件

在输出的文件夹中meshs文件夹中即为stl文件
使用Blender软件导入STL进行细微调整(可能需要调整坐标轴朝向)并导出OBJ文件即可
.OBJ文件格式

上述模型的描述文件如下
# Blender 3.3.1
# www.blender.org
mtllib link2.mtl
o link2
v 0.051850 -0.000000 0.082150
v 0.061750 -0.000000 0.082150
v 0.061750 -0.007838 0.082974
......
vn -0.0000 -0.1046 -0.9945
vn -0.0000 -0.3089 -0.9511
vn -0.0000 -0.5000 -0.8660
......
s 0
f 1//1 2//1 3//1
f 1//1 3//1 4//1
f 4//2 3//2 5//2
......
v 就是点的位置信息(3f x,y,z)
vn 就是点的法线信息(3f x,y,z)
vt 是点的纹理坐标(3f u,v,w),一般只用uv坐标即可
f 即面的信息
下面给出C++读取.OBJ文件的代码
readmodel.h
#ifndef READMODEL_H
#define READMODEL_H
#include readmodel.cpp
#include "./readmodel.h"
#include 分析:构造函数中读取.OBJ文件将点和面的信息存入类成员变量中,要绘制三维模型的时候调用类的draw()函数
void ROBOT_SIMULATION::initializeGL()
{
initializeOpenGLFunctions();
base_link = new readObj("./new_ur3_model/base_link.obj");
link1 = new readObj("./new_ur3_model/link1.obj");
link2 = new readObj("./new_ur3_model/link2.obj");
link3 = new readObj("./new_ur3_model/link3.obj");
link4 = new readObj("./new_ur3_model/link4.obj");
link5 = new readObj("./new_ur3_model/link5.obj");
link6 = new readObj("./new_ur3_model/link6.obj");
......
}
base_link->draw();
整体效果
