作品分享:基于STM32的温度报警器含源码、原理图、PCB文件、作品报告

文章目录
- 一.前言
- 二.材料准备
- 三.硬件部分
- 四.软件部分
-
- 1. 底层封装库
- 2.中间层
- 3.应用层
- 五.外壳设计
- 六.资料链接
一.前言

该作品是我在华工电工开放实习的作品,本作品由七部分组成。中央为Stm32F405RG芯片,使用两节18650电池供电,在外围加入大量外设。
DBS18B20温度传感器用于外界温度的测量;舵机、蜂鸣器用于检测响应;增加三个按键用于报警临界值的设定;数码管用于温度的实时显示,也用于临界值设定(配合按键使用);两个串口中USART2用于蓝牙连接手机,通过手机APP能够远程监控外界温度,USART1可以通过有线或者无线的方式连接PC,通过上位机能够直观地实时监测外界温度。因为外设数量较多,故引入了开源操作系统FreeRTOS用于多线程任务管理。
下面我分为硬件部分、软件部分、外观设计给大家介绍一下这个温度报警器。关于该作品的所有资料我放到了博客的最后。
框架图:

二.材料准备
| 材料 | 数量 |
|---|---|
| STM32F405RG芯片 | 1 |
| DBS18B20温度传感器 | 1 |
| 按键开关 | 3 |
| 电源开关 | 1 |
| 复位开关 | 1 |
| 5V蜂鸣器 | 1 |
| 共阳数码管 | 1 |
| HC-08蓝牙 | 1 |
| 25M贴片晶振(C9006) | 1 |
| HC-08蓝牙 | 1 |
| TPS54302 降压芯片 | 1 |
| MP2451 降压芯片 | 1 |
| 0603/0805元件 | 若干 |
| 表格仅供参考,详情看原理图为准。 |
三.硬件部分
开发环境:Altium Designer17
硬件部分并没有太复杂的电路,主要都是一些模块的拼凑。
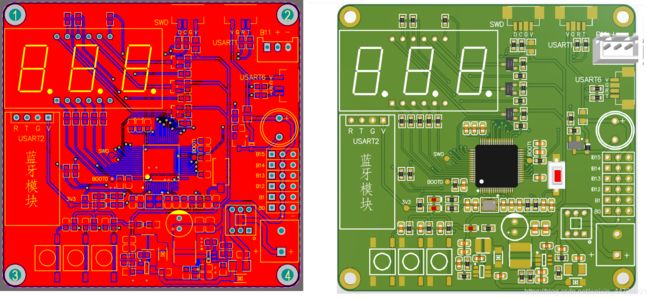
原理图:

四.软件部分
开发环境:Keil 、 CubeMX
Vesion : 5.28 、 5.4.0
开发语言:C++
代码主要分为底层库、中间层、上层(应用层),底层主要用于对各种外设的封装,中间层一般用来放置一些跟上位机、算法、通信相关的东西,而上层应用层则是最终的执行代码,简单的说即是最终执行的任务。
1. 底层封装库
底层库的封装作用是将上层需要用到的外设驱动进行封装,外设包括:定时器延时、DBS18B20温度传感器、共阳数码管显示、舵机、串口。驱动层封装的函数只为上层文件所调用,而不能调用上层函数,将项目分层包装是为了增强项目的扩展性与可读性。

比如:Nixie_tube.cpp(共阳数码管驱动)
uint8_t tens_temp=0;
uint8_t ones_temp=0;
uint8_t decimals=0;
void Nixie_tube_display(float value)
{
//提取出value的个位、十位、小数位
extern uint8_t tens_temp;
extern uint8_t ones_temp;
extern uint8_t decimals;
uint16_t value_int=(uint16_t)(10*value);
decimals=value_int%10;
ones_temp=(value_int/10)%10;
tens_temp=(value_int/100)%10;
/*十位*/
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_15,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
Led_output(tens_temp);
HAL_Delay(1);
/*个位*/
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_15,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
Led_output(ones_temp);
HAL_Delay(1);
/*小数位*/
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_15,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
Led_output(decimals);
HAL_Delay(1);
}
代码只列部分,详情自己看源码工程。
2.中间层
中间层用于连接底层与应用层,我一般用来写上位机、算法、通信部分。温度报警器的代码比较简单,只用到上位机。
开机温度:

加入热水测试:

注:因为上位机的程序不是我写的,所以这一部分的代码被我删去了。
3.应用层
应用层用来编写最终最后执行的任务,使用FreeRTOS实时系统用作任务管理。FreeRTOS共创建5个任务,任务间通过调度器进行任务切换。任务间优先级相同,5个任务轮流占用时间片进行运行。线程1至线程4执行频率都为1000Hz(1ms执行一次),线程5执行频率为1Hz(1s执行一次)。线程之间相互独立,复杂程序经过底层驱动以及中间层封装为函数,应用层直接调用即可。

/* Private variables ---------------------------------------------------------*/
TaskHandle_t Temperature_collecting_Handle;
TaskHandle_t Upper_computer_Handle;
TaskHandle_t Temperature_display_Handle;
TaskHandle_t Beep_steering_Handle;
TaskHandle_t Bluetooth_sent_Handle;
/* Private function prototypes -----------------------------------------------*/
void Temperature_collecting(void *arg);
void Upper_computer(void*arg);
void Temperature_display(void*arg);
void Beep_steering(void*arg);
void Bluetooth_sent(void*arg);
/* Function Init -------------------------------------------------------------*/
void System_Tasks_Init(void)
{
vTaskSuspendAll();
/*温度采集*/
xTaskCreate(Temperature_collecting,"Temperaturecollecting",Normal_Stack_Size,NULL,PriorityHigh,&Temperature_collecting_Handle);
/*上位机*/
xTaskCreate(Upper_computer,"Uppercomputer",Normal_Stack_Size,NULL,PriorityHigh,&Upper_computer_Handle);
/*数码管显示*/
xTaskCreate(Temperature_display,"Temperaturedisplay",Normal_Stack_Size,NULL,PriorityHigh,&Temperature_display_Handle);
/*蜂鸣器、舵机任务*/
xTaskCreate(Beep_steering,"Beepsteering",Normal_Stack_Size,NULL,PriorityHigh,&Beep_steering_Handle);
/*蓝牙串口发送任务*/
xTaskCreate(Bluetooth_sent,"Bluetoothsent",Normal_Stack_Size,NULL,PriorityHigh,&Bluetooth_sent_Handle);
if (!xTaskResumeAll())
taskYIELD();
}
/* Function Task -------------------------------------------------------------*/
/*1.温度采集任务*/
void Temperature_collecting(void *arg)
{
static TickType_t _xPreviousWakeTime = xTaskGetTickCount();
static TickType_t _xTimeIncrement = pdMS_TO_TICKS(10);
for (;;)
{
Current_Temperature=DS18B20_Get_Temp();
vTaskDelayUntil(&_xPreviousWakeTime, _xTimeIncrement);
}
}
/*2.上位机任务*/
void Upper_computer(void*arg)
{
static TickType_t _xPreviousWakeTime = xTaskGetTickCount();
static TickType_t _xTimeIncrement = pdMS_TO_TICKS(1);
for (;;)
{
// Sent_Contorl(&huart6);//上位机发送(上位机代码已删,所以把这里注释)
vTaskDelayUntil(&_xPreviousWakeTime, _xTimeIncrement);
}
}
/*3.数码管显示任务*/
void Temperature_display(void*arg)
{
static TickType_t _xPreviousWakeTime = xTaskGetTickCount();
static TickType_t _xTimeIncrement = pdMS_TO_TICKS(1);
for (;;)
{
/*当前温度显示*/
if(Selet_Mode==Current_Temperature_display)
{
Nixie_tube_display(Current_Temperature);
}
else
{
/*报警值设定*/
Nixie_tube_display(Alarm_Temperature);
}
vTaskDelayUntil(&_xPreviousWakeTime, _xTimeIncrement);
}
}
/*4.蜂鸣器、舵机任务*/
void Beep_steering(void*arg)
{
static TickType_t _xPreviousWakeTime = xTaskGetTickCount();
static TickType_t _xTimeIncrement = pdMS_TO_TICKS(1);
for (;;)
{
/*蜂鸣器报警*/
if((Current_Temperature>Alarm_Temperature)&&(Systemtime>2))
{
if(Beep_flag==1800)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_SET);
vTaskDelayUntil(&_xPreviousWakeTime, _xTimeIncrement);
}
else
{Beep_flag++;}
}
else
{
Beep_flag=0;
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_RESET);
vTaskDelayUntil(&_xPreviousWakeTime, _xTimeIncrement);
}
/*舵机控制*/
if(Current_Temperature<=30)
{
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, 2500);
}
}
}
/*5.蓝牙数据发送任务*/
void Bluetooth_sent(void*arg)
{
static TickType_t _xPreviousWakeTime = xTaskGetTickCount();
static TickType_t _xTimeIncrement = pdMS_TO_TICKS(1000);
for (;;)
{
Systemtime=Get_SystemTimer()/1000000;
My_printf2("\r\nSystemtime=%u\r\n",Systemtime);
My_printf2("Alarm_Temperature=%f\r\n",Alarm_Temperature);
My_printf2("Current_Temperature=%f\r\n",Current_Temperature);
vTaskDelayUntil(&_xPreviousWakeTime, _xTimeIncrement);
}
}
作品最终的效果的效果非常棒,预期的功能全部都能够完美实现。
本来是想拍一个展示视频的,但是后来作品交上去之后就再也拿不回来了。只留有之前的手机蓝牙接收消息的录屏,单片机通过蓝牙发送消息到手机,手机可以监控温度报警器的 开机时间 (s)、报警温度 (℃)、当前环境温度 (℃)。,执行频率为1Hz,所以是1s发送一次。
当温度超过设定值时,蜂鸣器就会响,舵机也会做出相应的反馈。三个按键可以调节报警温度。
蓝牙功能展示:
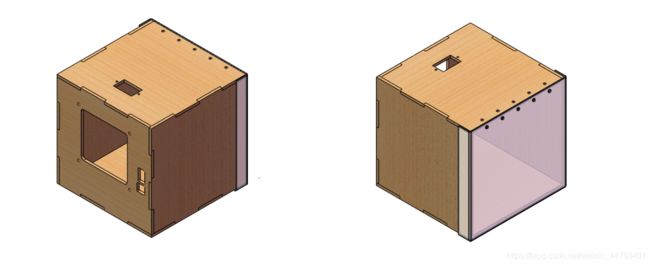
五.外壳设计
作品最后要上交展示,所以给它做了个外壳,电路板装在外边,里面主要用来走线以及放电池盒。黄色的材料是木头,白色的材料是薄PC板。
开发环境:Soildword2019
装上后的实物图:
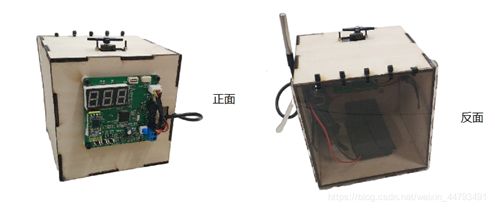
上电后的实物图:

六.资料链接
- 温度报警器硬件(Altium Designer17) 类型:收费5元。
- 温度报警器固件(Keil5.28+CubeMX5.4) 类型:点赞、关注即可直接下载。
- 温度报警器实验报告PDF 类型:点赞、关注即可直接下载。