动手学习深度学习(总结梳理)——12. 深度卷积神经网络(LeNet)
目录
1. LeNet
2. 模型训练
3. QA环节
3.1 池化和卷积是不是更适合图像这类型的数据,而对于时序性的数据(做分类)是不是不适合用这类数据?
3.2 LeNet第二个卷积层通道数增加到了16,这意味着信息被放大了嘛?或者说信息在通道是怎么流通的?
3.3 对于选择深度学习模型是用mlp还是cnn,是一种试的心态还是先从理论推导,行得通再选一个模型?
3.4 跑的动的情况下,是不是把中间层输出通道调大效果会好?

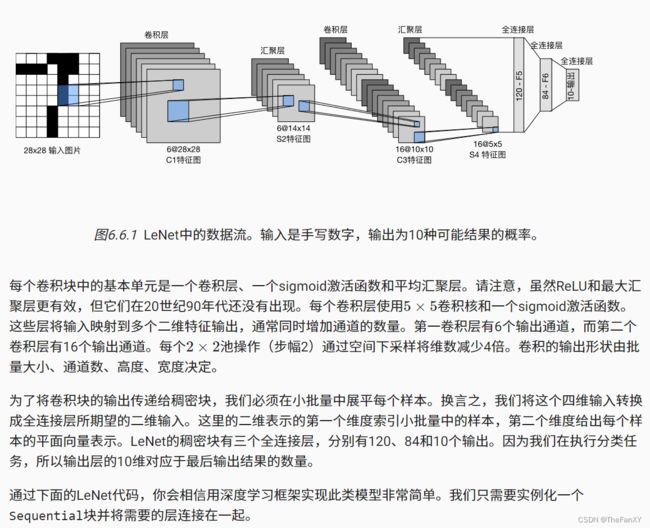
1. LeNet
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
''' 这里padding是为了保持输出的图片大小一直,取 k - 1 = 4'''
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))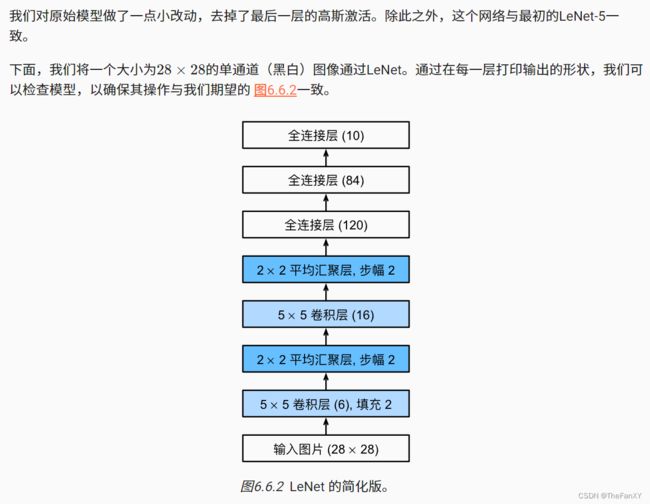
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)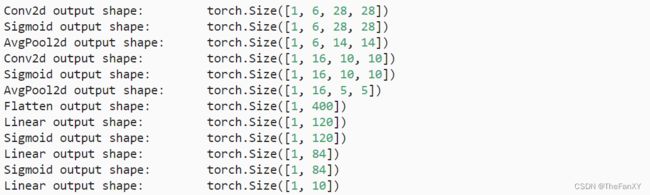
2. 模型训练
现在我们已经实现了LeNet,让我们看看LeNet在Fashion-MNIST数据集上的表现。
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)虽然卷积神经网络的参数较少,但与深度的多层感知机相比,它们的计算成本仍然很高,因为每个参数都参与更多的乘法。 如果你有机会使用GPU,可以用它加快训练。为了进行评估,我们需要对第二章softmax学习中描述的evaluate_accuracy函数进行轻微的修改。 由于完整的数据集位于内存中,因此在模型使用GPU计算数据集之前,我们需要将其复制到显存中。
def evaluate_accuracy_gpu(net, data_iter, device=None):
"""使用GPU计算模型在数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() ''' 设置为评估模式 '''
if not device:
''' 如果没有device就看看你网络层的device作为当前device '''
device = next(iter(net.parameters())).device
''' 正确预测的数量,总预测的数量 '''
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
''' BERT微调所需的(之后将介绍) '''
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]由于我们将实现多层神经网络,因此我们将主要使用高级API。 以下训练函数假定从高级API创建的模型作为输入,并进行相应的优化。 我们使用在第七章数值稳定性和模型初始化中介绍的Xavier随机初始化模型参数。 与全连接层一样,我们使用交叉熵损失函数和小批量随机梯度下降。
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型(在第六章定义)"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,样本数
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')现在,我们训练和评估LeNet-5模型。
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())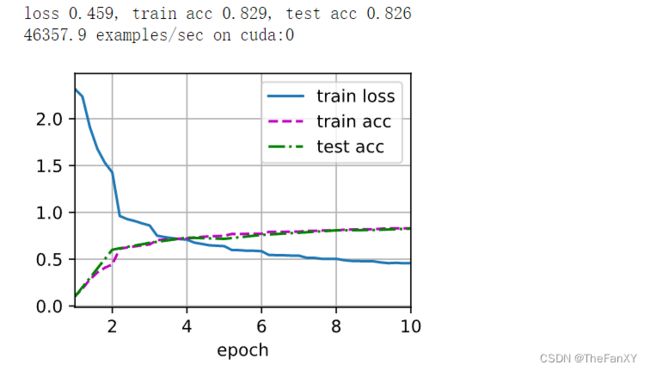
3. QA环节
3.1 池化和卷积是不是更适合图像这类型的数据,而对于时序性的数据(做分类)是不是不适合用这类数据?
时序是可以用卷积的,至于这个池化,很难说用不用,可以用的化还是用一下。
3.2 LeNet第二个卷积层通道数增加到了16,这意味着信息被放大了嘛?或者说信息在通道是怎么流通的?
其实我们从信息角度去看,高宽减小了,我们用一个更小的像素代表了以前更多像素的东西,但是通道变多了,意味着我们能匹配更多的模式,去拟合它更多的模型,然后压缩到最后,变成一个点就代表着一个类,所以从这个角度信息是在被压缩。
3.3 对于选择深度学习模型是用mlp还是cnn,是一种试的心态还是先从理论推导,行得通再选一个模型?
我们没有理论推导,就我的经验来看,如果数据不大的时候,比如你的数据就几百维,几千维的时候MLP还是可以的,当很大的时候,MLP首先基本就overfitting了。如果你数据都可以用,那可以先试一下MLP,毕竟它快啊。但是大了的你可能根本跑不动。
3.4 跑的动的情况下,是不是把中间层输出通道调大效果会好?
和MLP一样不能调太大,模型复杂会过拟合,和数据复杂度相关。