使用自己数据及进行PointNet++分类网络训练
目录
一、概述
二、数据集读取
三、运行代码
四、问题解决
五、总结
一、概述
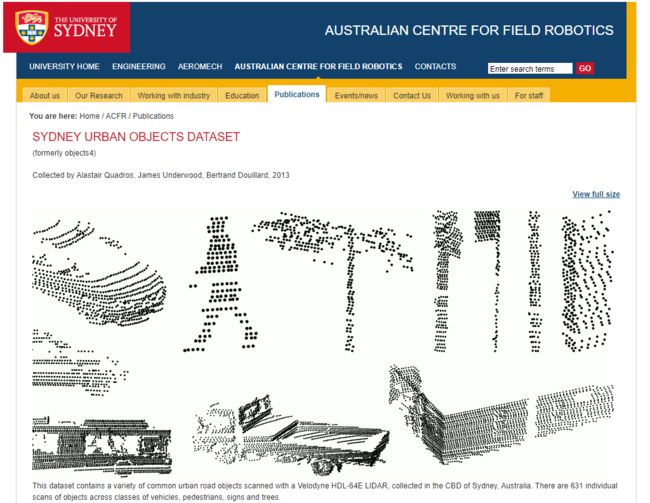
使用自己数据及进行PointNet++分类网络训练,这里我选中悉尼大学开放的自动驾驶数据集进行测试。
二、数据集读取
常用数据集
点云数据集_爱学习的小菜鸡的博客-CSDN博客_点云数据集
选用悉尼大学开放的自动驾驶数据集进行训练
方式一:安装snark软件
math-deg2rad.exe -h
方式二:使用pyton脚本读取
# -*- coding: utf-8 -*-
""" Simple example for loading object binary data. """
import numpy as np
import matplotlib.pyplot as plt
names = ['t','intensity','id',
'x','y','z',
'azimuth','range','pid']
formats = ['int64', 'uint8', 'uint8',
'float32', 'float32', 'float32',
'float32', 'float32', 'int32']
binType = np.dtype( dict(names=names, formats=formats) )
data = np.fromfile('objects/excavator.0.10974.bin', binType)
# 3D points, one per row
#按垂直方向(行顺序)堆叠数组构成一个新的数组
P = np.vstack([ data['x'], data['y'], data['z'] ]).T
print(P)
#visulize the pointcloud
x = []
y = []
z = []
for point in P:
x.append(point[0])
y.append(point[1])
z.append(point[2])
x = np.array(x, dtype=float)
y = np.array(y, dtype=float)
z = np.array(z, dtype=float)
ax = plt.subplot(projection='3d')
ax.set_title('image_show')
ax.scatter(x, y, z, c='r')
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
plt.show()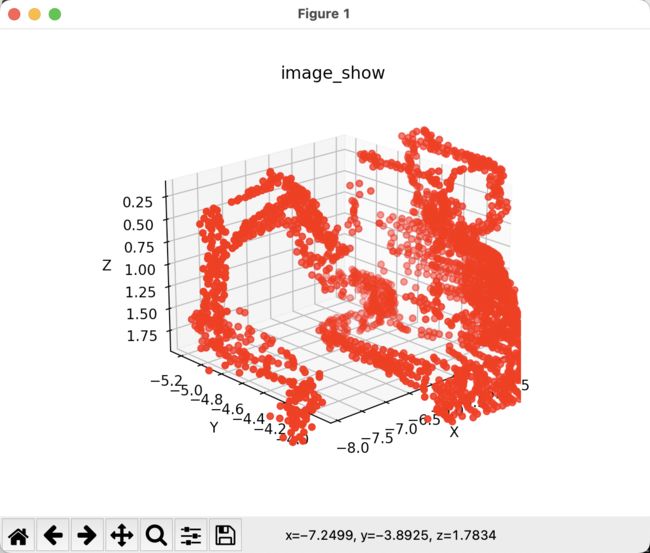
-
制作分类数据集
数据集格式要求,参照modelnet10、modelnet40分类数据格式:
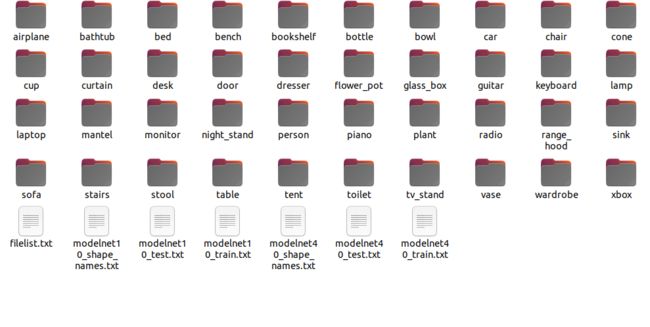
如下图:

说明:
allclass:所有类别说明
filelist:列出所有文件所在路径
testlist:测试数据
trainlist:训练数据
三、运行代码
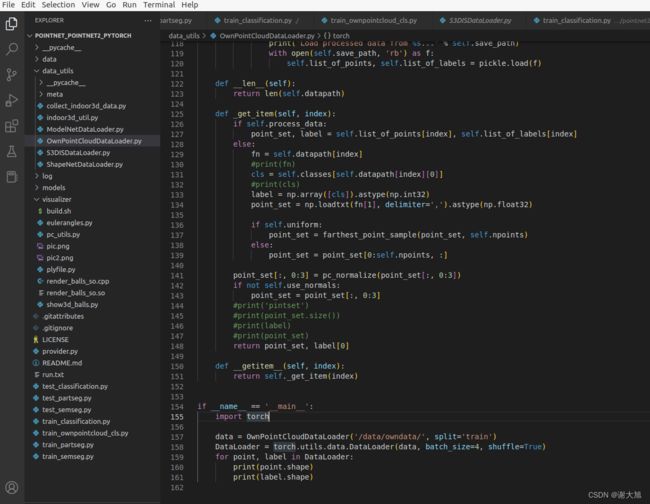
代码目录:
 新增
新增
train_ownpointcloud_cls.py
"""
Author: Benny
Date: Nov 2019
"""
import os
import sys
import torch
import numpy as np
import datetime
import logging
import provider
import importlib
import shutil
import argparse
from pathlib import Path
from tqdm import tqdm
from data_utils.OwnPointCloudDataLoader import OwnPointCloudDataLoader
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
ROOT_DIR = BASE_DIR
sys.path.append(os.path.join(ROOT_DIR, 'models'))
def parse_args():
'''PARAMETERS'''
parser = argparse.ArgumentParser('training')
parser.add_argument('--use_cpu', action='store_true', default=False, help='use cpu mode')
parser.add_argument('--gpu', type=str, default='0', help='specify gpu device')
parser.add_argument('--batch_size', type=int, default=20, help='batch size in training')
parser.add_argument('--model', default='pointnet_cls', help='model name [default: pointnet_cls]')
parser.add_argument('--num_category', default=4, type=int, choices=[4,10, 40], help='training on ModelNet10/40')
parser.add_argument('--epoch', default=200, type=int, help='number of epoch in training')
parser.add_argument('--learning_rate', default=0.001, type=float, help='learning rate in training')
parser.add_argument('--num_point', type=int, default=1024, help='Point Number')
parser.add_argument('--optimizer', type=str, default='Adam', help='optimizer for training')
parser.add_argument('--log_dir', type=str, default=None, help='experiment root')
parser.add_argument('--decay_rate', type=float, default=1e-4, help='decay rate')
parser.add_argument('--use_normals', action='store_true', default=False, help='use normals')
parser.add_argument('--process_data', action='store_true', default=False, help='save data offline')
parser.add_argument('--use_uniform_sample', action='store_true', default=False, help='use uniform sampiling')
return parser.parse_args()
def inplace_relu(m):
classname = m.__class__.__name__
if classname.find('ReLU') != -1:
m.inplace=True
def test(model, loader, num_class=40):
mean_correct = []
class_acc = np.zeros((num_class, 3))
classifier = model.eval()
for j, (points, target) in tqdm(enumerate(loader), total=len(loader)):
if not args.use_cpu:
points, target = points.cuda(), target.cuda()
points = points.transpose(2, 1)
pred, _ = classifier(points)
pred_choice = pred.data.max(1)[1]
for cat in np.unique(target.cpu()):
classacc = pred_choice[target == cat].eq(target[target == cat].long().data).cpu().sum()
class_acc[cat, 0] += classacc.item() / float(points[target == cat].size()[0])
class_acc[cat, 1] += 1
correct = pred_choice.eq(target.long().data).cpu().sum()
mean_correct.append(correct.item() / float(points.size()[0]))
class_acc[:, 2] = class_acc[:, 0] / class_acc[:, 1]
class_acc = np.mean(class_acc[:, 2])
instance_acc = np.mean(mean_correct)
return instance_acc, class_acc
def main(args):
def log_string(str):
logger.info(str)
print(str)
'''HYPER PARAMETER'''
os.environ["CUDA_VISIBLE_DEVICES"] = args.gpu
'''CREATE DIR'''
timestr = str(datetime.datetime.now().strftime('%Y-%m-%d_%H-%M'))
exp_dir = Path('./log/')
exp_dir.mkdir(exist_ok=True)
exp_dir = exp_dir.joinpath('classification')
exp_dir.mkdir(exist_ok=True)
if args.log_dir is None:
exp_dir = exp_dir.joinpath(timestr)
else:
exp_dir = exp_dir.joinpath(args.log_dir)
exp_dir.mkdir(exist_ok=True)
checkpoints_dir = exp_dir.joinpath('checkpoints/')
checkpoints_dir.mkdir(exist_ok=True)
log_dir = exp_dir.joinpath('logs/')
log_dir.mkdir(exist_ok=True)
'''LOG'''
args = parse_args()
logger = logging.getLogger("Model")
logger.setLevel(logging.INFO)
formatter = logging.Formatter('%(asctime)s - %(name)s - %(levelname)s - %(message)s')
file_handler = logging.FileHandler('%s/%s.txt' % (log_dir, args.model))
file_handler.setLevel(logging.INFO)
file_handler.setFormatter(formatter)
logger.addHandler(file_handler)
log_string('PARAMETER ...')
log_string(args)
'''DATA LOADING'''
log_string('Load dataset ...')
data_path = 'data/owndata/'
train_dataset = OwnPointCloudDataLoader(root=data_path, args=args, split='train', process_data=args.process_data)
test_dataset = OwnPointCloudDataLoader(root=data_path, args=args, split='test', process_data=args.process_data)
trainDataLoader = torch.utils.data.DataLoader(train_dataset, batch_size=args.batch_size, shuffle=True, num_workers=10, drop_last=True)
testDataLoader = torch.utils.data.DataLoader(test_dataset, batch_size=args.batch_size, shuffle=False, num_workers=10)
'''MODEL LOADING'''
num_class = args.num_category
model = importlib.import_module(args.model)
shutil.copy('./models/%s.py' % args.model, str(exp_dir))
shutil.copy('models/pointnet2_utils.py', str(exp_dir))
shutil.copy('./train_classification.py', str(exp_dir))
classifier = model.get_model(num_class, normal_channel=args.use_normals)
criterion = model.get_loss()
classifier.apply(inplace_relu)
if not args.use_cpu:
classifier = classifier.cuda()
criterion = criterion.cuda()
try:
checkpoint = torch.load(str(exp_dir) + '/checkpoints/best_model.pth')
start_epoch = checkpoint['epoch']
classifier.load_state_dict(checkpoint['model_state_dict'])
log_string('Use pretrain model')
except:
log_string('No existing model, starting training from scratch...')
start_epoch = 0
if args.optimizer == 'Adam':
optimizer = torch.optim.Adam(
classifier.parameters(),
lr=args.learning_rate,
betas=(0.9, 0.999),
eps=1e-08,
weight_decay=args.decay_rate
)
else:
optimizer = torch.optim.SGD(classifier.parameters(), lr=0.01, momentum=0.9)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=20, gamma=0.7)
global_epoch = 0
global_step = 0
best_instance_acc = 0.0
best_class_acc = 0.0
'''TRANING'''
logger.info('Start training...')
for epoch in range(start_epoch, args.epoch):
log_string('Epoch %d (%d/%s):' % (global_epoch + 1, epoch + 1, args.epoch))
mean_correct = []
classifier = classifier.train()
scheduler.step()
#print('================batch_id===============')
for batch_id, (points, target) in tqdm(enumerate(trainDataLoader, 0), total=len(trainDataLoader), smoothing=0.9):
optimizer.zero_grad()
points = points.data.numpy()
#print(points)
points = provider.random_point_dropout(points)
points[:, :, 0:3] = provider.random_scale_point_cloud(points[:, :, 0:3])
points[:, :, 0:3] = provider.shift_point_cloud(points[:, :, 0:3])
points = torch.Tensor(points)
points = points.transpose(2, 1)
if not args.use_cpu:
points, target = points.cuda(), target.cuda()
pred, trans_feat = classifier(points)
loss = criterion(pred, target.long(), trans_feat)
pred_choice = pred.data.max(1)[1]
correct = pred_choice.eq(target.long().data).cpu().sum()
mean_correct.append(correct.item() / float(points.size()[0]))
loss.backward()
optimizer.step()
global_step += 1
train_instance_acc = np.mean(mean_correct)
log_string('Train Instance Accuracy: %f' % train_instance_acc)
with torch.no_grad():
instance_acc, class_acc = test(classifier.eval(), testDataLoader, num_class=num_class)
if (instance_acc >= best_instance_acc):
best_instance_acc = instance_acc
best_epoch = epoch + 1
if (class_acc >= best_class_acc):
best_class_acc = class_acc
log_string('Test Instance Accuracy: %f, Class Accuracy: %f' % (instance_acc, class_acc))
log_string('Best Instance Accuracy: %f, Class Accuracy: %f' % (best_instance_acc, best_class_acc))
if (instance_acc >= best_instance_acc):
logger.info('Save model...')
savepath = str(checkpoints_dir) + '/best_model.pth'
log_string('Saving at %s' % savepath)
state = {
'epoch': best_epoch,
'instance_acc': instance_acc,
'class_acc': class_acc,
'model_state_dict': classifier.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
}
torch.save(state, savepath)
global_epoch += 1
logger.info('End of training...')
if __name__ == '__main__':
args = parse_args()
main(args)
新增OwnPointCloudDataLoader.py
'''
@author: Xu Yan
@file: ModelNet.py
@time: 2021/3/19 15:51
'''
import os
import numpy as np
import warnings
import pickle
from tqdm import tqdm
from torch.utils.data import Dataset
warnings.filterwarnings('ignore')
def pc_normalize(pc):
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc ** 2, axis=1)))
pc = pc / m
return pc
def farthest_point_sample(point, npoint):
"""
Input:
xyz: pointcloud data, [N, D]
npoint: number of samples
Return:
centroids: sampled pointcloud index, [npoint, D]
"""
N, D = point.shape
xyz = point[:, :3]
centroids = np.zeros((npoint,))
distance = np.ones((N,)) * 1e10
farthest = np.random.randint(0, N)
for i in range(npoint):
centroids[i] = farthest
centroid = xyz[farthest, :]
dist = np.sum((xyz - centroid) ** 2, -1)
mask = dist < distance
distance[mask] = dist[mask]
farthest = np.argmax(distance, -1)
point = point[centroids.astype(np.int32)]
return point
class OwnPointCloudDataLoader(Dataset):
def __init__(self, root, args, split='train', process_data=False):
self.root = root
self.npoints = args.num_point
self.process_data = process_data
self.uniform = args.use_uniform_sample
self.use_normals = args.use_normals
self.num_category = args.num_category
if self.num_category == 10:
self.catfile = os.path.join(self.root, 'allclass.txt')
else:
self.catfile = os.path.join(self.root, 'allclass.txt')
self.cat = [line.rstrip() for line in open(self.catfile)]
#print('cat')
#print(self.cat)
self.classes = dict(zip(self.cat, range(len(self.cat))))
shape_ids = {}
if self.num_category == 10:
shape_ids['train'] = [line.rstrip() for line in open(os.path.join(self.root, 'trainlist.txt'))]
shape_ids['test'] = [line.rstrip() for line in open(os.path.join(self.root, 'testlist.txt'))]
else:
shape_ids['train'] = [line.rstrip() for line in open(os.path.join(self.root, 'trainlist.txt'))]
shape_ids['test'] = [line.rstrip() for line in open(os.path.join(self.root, 'testlist.txt'))]
print('shape_ids:')
print(shape_ids['train'] )
assert (split == 'train' or split == 'test')
#origin format : airplane_0627
#new format : pedestrian.9.6994
shape_names = [''.join(x.split('.')[0]) for x in shape_ids[split]]
print('shapenames:')
print(shape_names)
self.datapath = [(shape_names[i], os.path.join(self.root, shape_names[i], shape_ids[split][i]) + '.txt') for i
in range(len(shape_ids[split]))]
print('The size of %s data is %d' % (split, len(self.datapath)))
if self.uniform:
self.save_path = os.path.join(root,
'ownpointcloud%d_%s_%dpts_fps.dat' % (self.num_category, split, self.npoints))
else:
self.save_path = os.path.join(root, 'ownpointcloud%d_%s_%dpts.dat' % (self.num_category, split, self.npoints))
if self.process_data:
if not os.path.exists(self.save_path):
print('Processing data %s (only running in the first time)...' % self.save_path)
self.list_of_points = [None] * len(self.datapath)
self.list_of_labels = [None] * len(self.datapath)
for index in tqdm(range(len(self.datapath)), total=len(self.datapath)):
fn = self.datapath[index]
cls = self.classes[self.datapath[index][0]]
cls = np.array([cls]).astype(np.int32)
point_set = np.loadtxt(fn[1], delimiter=',').astype(np.float32)
if self.uniform:
point_set = farthest_point_sample(point_set, self.npoints)
else:
point_set = point_set[0:self.npoints, :]
self.list_of_points[index] = point_set
self.list_of_labels[index] = cls
with open(self.save_path, 'wb') as f:
pickle.dump([self.list_of_points, self.list_of_labels], f)
else:
print('Load processed data from %s...' % self.save_path)
with open(self.save_path, 'rb') as f:
self.list_of_points, self.list_of_labels = pickle.load(f)
def __len__(self):
return len(self.datapath)
def _get_item(self, index):
if self.process_data:
point_set, label = self.list_of_points[index], self.list_of_labels[index]
else:
fn = self.datapath[index]
#print(fn)
cls = self.classes[self.datapath[index][0]]
#print(cls)
label = np.array([cls]).astype(np.int32)
point_set = np.loadtxt(fn[1], delimiter=',').astype(np.float32)
if self.uniform:
point_set = farthest_point_sample(point_set, self.npoints)
else:
point_set = point_set[0:self.npoints, :]
point_set[:, 0:3] = pc_normalize(point_set[:, 0:3])
if not self.use_normals:
point_set = point_set[:, 0:3]
#print('pintset')
#print(point_set.size())
#print(label)
#print(point_set)
return point_set, label[0]
def __getitem__(self, index):
return self._get_item(index)
if __name__ == '__main__':
import torch
data = OwnPointCloudDataLoader('/data/owndata/', split='train')
DataLoader = torch.utils.data.DataLoader(data, batch_size=4, shuffle=True)
for point, label in DataLoader:
print(point.shape)
print(label.shape)
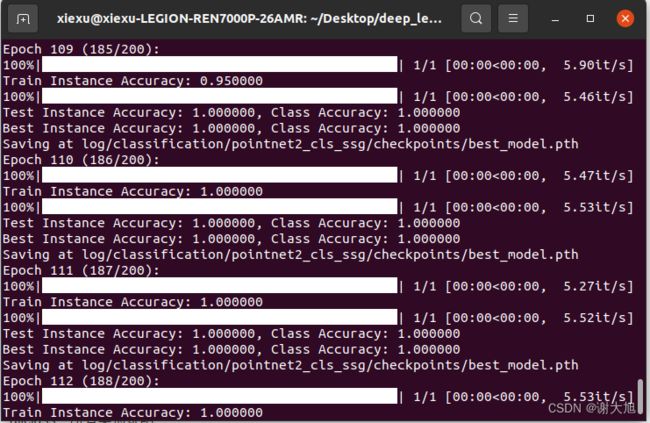
运行截图:
四、问题解决
解决问题过程出现了好几处,都是比较容易解决的问题,这里记录这个我感觉比较棘手的。
1、 RuntimeError: stack expects each tensor to be equal size, but got [124, 3] at entry 0 and [162, 3] at entry 1
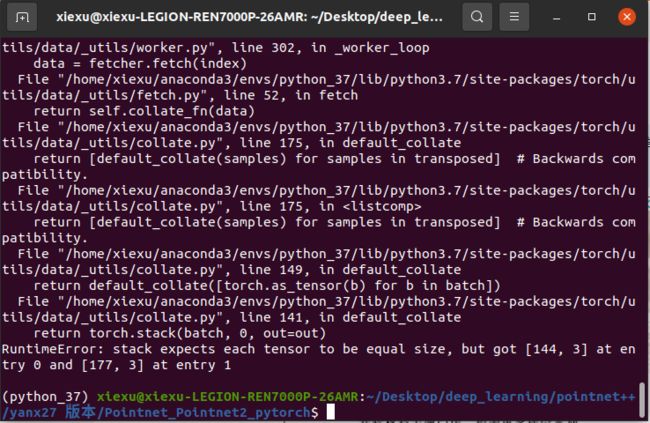
这个问题是daloaded读取时候,modelnet默认·每个txt都是10000个点,因此自己数据数据量不统一,就报错了。
解决办法:保证数据到torch.stack里边张量的size一直
1、保证txt点云点的个数一致
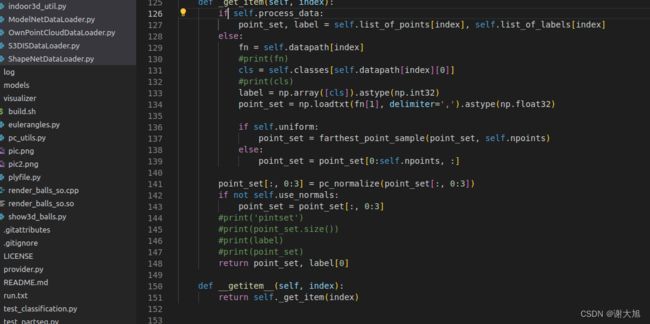
2、实现getitem时候,张量进行补全,代码在这
五、总结
记录几个在制作数据集时候需要注意的问题:
1、目录结构要保持一致,文件名不用一致,因为代码里边能够改
2、txt内容要一致,不管是格式还是数量(比如上边的问题),因为作者的数据集比较标准,用自己数据时候可能情况比较复杂,当前也能够在代码角度进行解决。
3、建议使用小批量数据进行测试,测试没有问题后,在开始用脚本进行数据集的输入,不然制作的数据集出问题,反复改代码,也是麻烦。还可能带来新的错误,毕竟有时候情况复杂,考虑不周。