Pytorch学习笔记(三):神经网络基本骨架
一、Containers
Module:给所有神经网络提供基本骨架,输入的参数x会经过一次卷积,一次非线性,再进行一次卷积与非线性才会得到输出。
神经网络基本结构的使用:
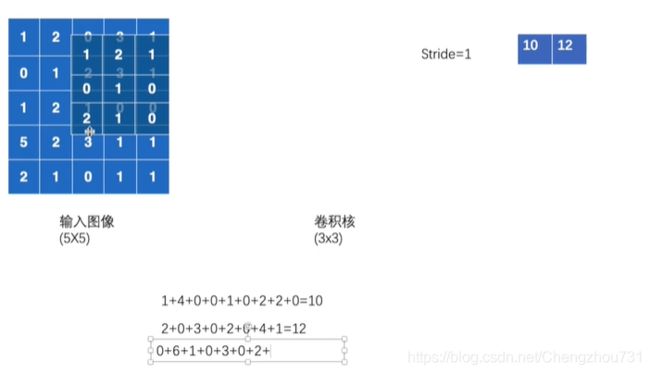
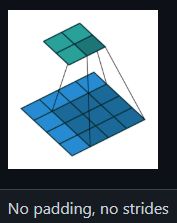
1. 卷积层
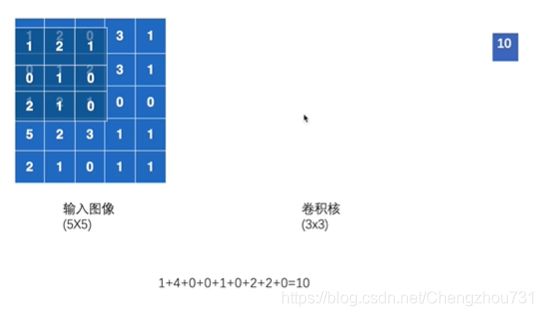
接下来卷积核会在图像上逐渐移动,移动的步长可以通过stride参数进行调整。输入的参数可以是一个数,也可以通过元祖来设置横向和纵向移动的步长。
代码实现:
##----nn.conv2d
import torch
import torchvision
from torch.utils.data import DataLoader
from torch.nn import Conv2d
dataset = torchvision.datasets.CIFAR10("dataset",train = False , transform = torchvision.transforms.ToTensor(),download= True)
dataloader = DataLoader(dataset, batch_size= 64)
class Test(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = Conv2d(in_channels=3,out_channels=6,kernel_size=3,stride=1,padding=0) # 网络中有卷积层
def forward(self,x):
x = self.conv1(x)
return x
test = Test()
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter("logs")
step = 0
for data in dataloader:
imgs,targets = data
output = test(imgs)
print(imgs.shape)
print(output.shape)
# torch.Size([64, 3, 32, 32])
writer.add_images("input",imgs,step)
# torch.Size([64, 6, 30, 30])
output = torch.reshape(output,(-1,3,30,30))
writer.add_images("output",output,step)
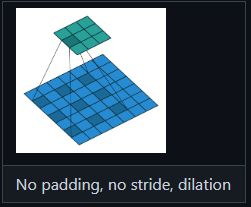
step += 1可以根据以下公式,确定padding和dilation去进行实现。

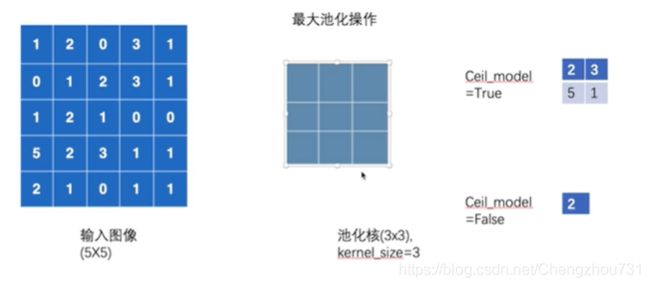
2. 池化层:池化层夹在连续的卷积层中间, 用于压缩数据和参数的量,减小过拟合。
dilation: 每一个核当中的元素与核当中另外一个元素会有空格,也称其为空洞卷积
ceil_mode: 当设置为True时,则为ceil模式
最大池化操作:减少数据量,训练速度更快
代码实现:
## nn_maxpool
import torch
from torch import nn
from torch.nn import MaxPool2d
input = torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]],dtype = torch.float32) # 设置为浮点数
input = torch.reshape(input,(-1,1,5,5))
class model(nn.Module):
def __init__(self):
super().__init__()
self.maxpool1 = MaxPool2d(kernel_size = 3, ceil_mode = True)
def forward(self,input):
output = self.maxpool1(input)
return output
Model = model()
output = Model(input)
print(output)
dataset = torchvision.datasets.CIFAR10("dataset",train = False , transform = torchvision.transforms.ToTensor(),download= True)
dataloader = DataLoader(dataset, batch_size= 64)
writer = SummaryWriter("logs_maxpool")
step = 0
for data in dataloader:
imgs,target = data
writer.add_images("input",imgs,step)
output = Model(imgs)
writer.add_images("output",imgs,step)
print(imgs.shape) # 通道数是没有进行变化的
print(output.shape)
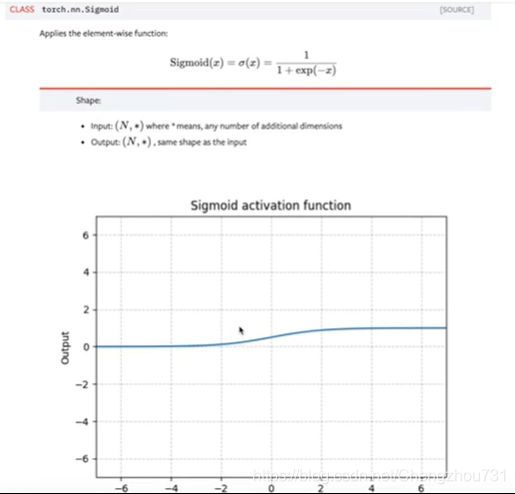
step += 13. 非线性激活:给神经网络中引入非线性特质
RELU:当Input>0时,保持原函数值;当Input<0时,取值变为0。
Sigmoid:
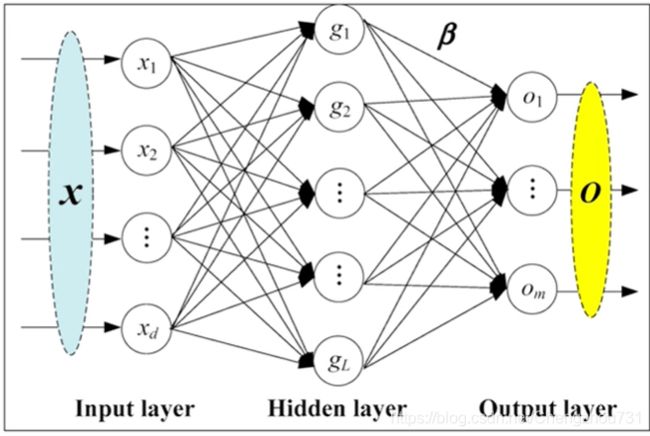
4. 线性层及其他层介绍
CLASS torch.nn.Linear(in_features,out_features,bias = True)
in_features:输入特征 x1, x2, x3
out_features:输出特征g1, g2, g3
bias:决定是否附加bias
例:对于一张5 * 5的图片,将其变成1 * 3的图片
## nn.linear
from torch import nn
import torch
import torchvision
from torch.utils.data import DataLoader
from torch.nn import Linear
dataset = torchvision.datasets.CIFAR10("dataset",train = False , transform = torchvision.transforms.ToTensor(),download= True)
dataloader = DataLoader(dataset, batch_size= 64,drop_last= True)
class linear(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = Linear(196608,10)
def forward(self,input):
output = self.linear1(input)
return output
linear = linear()
for data in dataloader:
imgs,targets = data
# output = torch.reshape(imgs,(1,1,1,-1))
output = torch.flatten(imgs) # 与上方函数作用相同
output = linear(output)
print(output.shape)5. Sequential:A sequential container.Modules will be added to it in the order they are passed in the constructor. Alternatively, an ordered dict of modules can also be passed in.
## 搭建一个简单的神经网络
from torch import nn
from torch.nn import Conv2d,MaxPool2d,Flatten,Linear
class model(nn.Module):
def __init__(self):
super().__init__()
self.model1 = nn.Sequential(
Conv2d(3,32,5,1,2),
MaxPool2d(2),
Conv2d(32,32,5,1,2),
MaxPool2d(2),
Conv2d(32,64,5,1,2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
) # Sequential 简洁了后续操作
def forward(self,input):
output = self.model1(input)
return output
model = model()
x = torch.ones([64,3,32,32])
output = model(x)
print(output.shape)
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter("logs")
writer.add_graph(model,input)
writer.close()6. 损失函数与反向传播:计算实际输出和目标之间的差距,为我们更新输出提供一定的依据(反向传播)
L1loss:绝对值损失
import torch
inputs = torch.tensor([1,2,3],dtype = torch.float32)
targets = torch.tensor([1,2,5],dtype = torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))
loss = torch.nn.L1Loss()
loss(inputs,targets)MSEloss:均方误差
import torch
from torch import nn
inputs = torch.tensor([1,2,3],dtype = torch.float32)
targets = torch.tensor([1,2,5],dtype = torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))
# loss = torch.nn.L1Loss()
loss_mse = nn.MSELoss()
# loss(inputs,targets)
loss_mse(inputs,targets)CrossEntropyLoss:交叉熵误差——分类问题
x = torch.tensor([0.1,0.2,0.3])
x = torch.reshape(x,(1,3)) # batch size = 1 , 有3类
y = torch.tensor([1])
loss_cross = nn.CrossEntropyLoss()
result_cross = loss_cross(x,y)
print(result_cross)反向传播:计算实际输出和目标之间的差距,为我们更新输出提供一定的依据。
优化器:
para:所需传入的模型参数
lr:learning rate 学习速率
## Optimizer
import torch
loss = nn.CrossEntropyLoss()
optim = torch.optim.SGD(model.parameters(),lr = 0.01)
for epoch in range(20):
running_loss = 0.0
for data in dataloader:
imgs,targets = data
outputs = model(imgs)
result_loss = loss(outputs,targets)
optim.zero_grad()
result_loss.backward() #允许其可以反向传播
optim.step()
running_loss = running_loss + result_loss
print(running_loss)