机器臂(二)--视觉控制关节点
在先前配置好的机器臂教程接着下做
先是视觉方面demo
手势识别的mediapipe 是谷歌开源项目 这个的主要功能是识别手势 然后封装成类给下面的控制模块调用
import cv2
import mediapipe as mp
class HandDetector:
def __init__(self, mode=False, maxHands=2, detectionCon=0.5, minTrackCon=0.5):
self.mode = mode
self.maxHands = maxHands
self.detectionCon = detectionCon
self.minTrackCon = minTrackCon
self.mpHands = mp.solutions.hands
self.hands = self.mpHands.Hands(static_image_mode=self.mode, max_num_hands=self.maxHands,
min_detection_confidence=self.detectionCon,
min_tracking_confidence=self.minTrackCon)
self.mpDraw = mp.solutions.drawing_utils
self.tipIds = [4, 8, 12, 16, 20]
self.fingers = []
self.lmList = []
def findHands(self, img, draw=True, flipType=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(imgRGB)
allHands = []
h, w, c = img.shape
if self.results.multi_hand_landmarks:
for handType, handLms in zip(self.results.multi_handedness, self.results.multi_hand_landmarks):
myHand = {}
## lmList
mylmList = []
xList = []
yList = []
for id, lm in enumerate(handLms.landmark):
px, py, pz = int(lm.x * w), int(lm.y * h), int(lm.z * w)
mylmList.append([px, py, pz])
xList.append(px)
yList.append(py)
## bbox
xmin, xmax = min(xList), max(xList)
ymin, ymax = min(yList), max(yList)
boxW, boxH = xmax - xmin, ymax - ymin
bbox = xmin, ymin, boxW, boxH
cx, cy = bbox[0] + (bbox[2] // 2), \
bbox[1] + (bbox[3] // 2)
myHand["lmList"] = mylmList
myHand["bbox"] = bbox
myHand["center"] = (cx, cy)
if flipType:
if handType.classification[0].label == "Right":
myHand["type"] = "Left"
else:
myHand["type"] = "Right"
else:
myHand["type"] = handType.classification[0].label
allHands.append(myHand)
## draw
if draw:
self.mpDraw.draw_landmarks(img, handLms,
self.mpHands.HAND_CONNECTIONS)
cv2.rectangle(img, (bbox[0] - 20, bbox[1] - 20),
(bbox[0] + bbox[2] + 20, bbox[1] + bbox[3] + 20),
(255, 0, 255), 2)
cv2.putText(img, myHand["type"], (bbox[0] - 30, bbox[1] - 30), cv2.FONT_HERSHEY_PLAIN,
2, (255, 0, 255), 2)
if draw:
return allHands, img
else:
return allHands
def fingersUp(self, myHand):
"""
判断多少个手指起来
"""
myHandType = myHand["type"]
myLmList = myHand["lmList"]
if self.results.multi_hand_landmarks:
fingers = []
# Thumb
if myHandType == "Right":
fingers.append(0)#右手
if myLmList[self.tipIds[0]][0] > myLmList[self.tipIds[0] - 1][0]:
fingers.append(1)
else:
fingers.append(0)
else:
fingers.append(1)#左手
if myLmList[self.tipIds[0]][0] < myLmList[self.tipIds[0] - 1][0]:
fingers.append(1)
else:
fingers.append(0)
# 4 Fingers
for id in range(1, 5):
if myLmList[self.tipIds[id]][1] < myLmList[self.tipIds[id] - 2][1]:
fingers.append(1)
else:
fingers.append(0)
return fingers
def main():
cap = cv2.VideoCapture(0)
detector = HandDetector(detectionCon=0.8, maxHands=2)
while True:
# Get image frame
success, img = cap.read()
# Find the hand and its landmarks
hands, img = detector.findHands(img) # with draw
# hands = detector.findHands(img, draw=False) # without draw
if hands:
# Hand 1
hand1 = hands[0]
lmList1 = hand1["lmList"] # List of 21 Landmark points
handType1 = hand1["type"] # Handtype Left or Right
fingers1 = detector.fingersUp(hand1)
print(fingers1)
if len(hands) == 2:
# Hand 2
hand2 = hands[1]
lmList2 = hand2["lmList"] # List of 21 Landmark points
bbox2 = hand2["bbox"] # Bounding box info x,y,w,h
centerPoint2 = hand2['center'] # center of the hand cx,cy
handType2 = hand2["type"] # Hand Type "Left" or "Right"
fingers2 = detector.fingersUp(hand2)
print(fingers2)
# Display
cv2.imshow("Image", img)
cv2.waitKey(1)
if __name__ == "__main__":
main()控制关节点的python demo 模块
#! /usr/bin/python3.8
# -*- coding: utf-8 -*-
from operator import ge
from time import sleep
import HandTrackingModule as Hd
import rospy
import cv2
from sensor_msgs.msg import JointState
import sys, termios
msg = """
Control Your Turtlebot!
---------------------------
Moving around:
q w e r t y
a s d f g h
j/l : increase/decrease precision by 0.05
space key, k : reset
anything else : stop smoothly
b : switch to arm_four/arm_six
precision is not less than or equal to zero
CTRL-C to quit
"""
mode = 0 #六自由度模式
precision = 0.05 #默认精度(rad)
#键值对应转动方向
rotateBindings = {
'q':(1,1),#第一个关节顺时针
'a':(1,-1),
'w':(2,1),
's':(2,-1),
'e':(3,1),
'd':(3,-1),
'r':(4,1),
'f':(4,-1),
't':(5,1),
'g':(5,-1),
'y':(6,1),
'h':(6,-1)
}
#键值对应精度增量
precisionBindings={
'j':0.01,
'l':-0.01
}
#以字符串格式返回当前控制精度
def prec(precision):
return "currently:\tprecision %s " %precision
# 检测手势
def detect_hands_gesture(result):
#0 1 2 3 4 5 6
#7 8 9 10 11 12
if result[0]==0:
if (result[1:] == [0,1,0,0,0]):
gesture = "a" #
return gesture
elif (result[1:] == [0,1,1,0,0]):
gesture = "s"
return gesture
elif (result[1:] == [0,0,1,1,1]):
gesture = "d"
return gesture
elif (result[1:] == [0,1,1,1,1]):
gesture = "f"
return gesture
elif (result[1:] == [1,1,1,1,1]):
gesture = "g"
return gesture
elif (result[1:] == [1,0,0,0,1]):
gesture = "h"
return gesture
elif (result[1:] == [1,1,0,0,1]):
gesture = " " #R&K手臂直立
return gesture
elif result[0]==1:
if (result[1:] == [0,1,0,0,0]):
gesture = "q"
return gesture
elif (result[1:] == [0,1,1,0,0]):
gesture = "w"
return gesture
elif (result[1:] == [0,0,1,1,1]):
gesture = "e"
return gesture
elif (result[1:] == [0,1,1,1,1]):
gesture = "r"
return gesture
elif (result[1:] == [1,1,1,1,1]):
gesture = "t"
return gesture
elif (result[1:] == [1,0,0,0,1]):#小拇指
gesture = "y"
return gesture
#主函数
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin) #获取键值初始化,读取终端相关属性
rospy.init_node('arm_teleop') #创建ROS节点
pub = rospy.Publisher('/joint_states', JointState, queue_size=5) #创建机械臂状态话题发布者
#关节1-6对应弧度状态
joints = [0,0,0,0,0,0]
"""机械臂关节初始化"""
jointState = JointState() #创建ROS机械臂装态话题消息变量
jointState.header.stamp = rospy.Time.now()
jointState.name=["joint1","joint2","joint3","joint4","joint5","joint6"]
jointState.position=joints
pub.publish(jointState) #ROS发布机械臂状态话题
# 接入USB摄像头时,注意修改cap设备的编号
cap = cv2.VideoCapture(0)
detector = Hd.HandDetector(detectionCon=0.8, maxHands=2)
if not cap.isOpened():
print("Can not open camera.")
exit()
try:
print(msg) #打印控制说明
print(prec(precision)) #打印当前精度
key = " "
while(1):
# Get image frame
success, img = cap.read()
# Find the hand and its landmarks
hands, img = detector.findHands(img) # with draw
# hands = detector.findHands(img, draw=False) # without draw
cv2.imshow("Image", img)
cv2.waitKey(1)
if hands :
key = detect_hands_gesture(detector.fingersUp(hands[0]))
#判断键值是在控制机械臂运动的键值内
if key in rotateBindings.keys():
joints[rotateBindings[key][0]-1] = joints[rotateBindings[key][0]-1] + precision*rotateBindings[key][1]
if joints[rotateBindings[key][0]-1]>1.57:
joints[rotateBindings[key][0]-1]=1.57
elif joints[rotateBindings[key][0]-1]<-1.57:
joints[rotateBindings[key][0]-1]=-1.57
#判断键值是否在精度增量键值内
elif key in precisionBindings.keys():
if (precision+precisionBindings[key])<0.01 or (precision+precisionBindings[key])>0.1:
pass
else:
precision+=precisionBindings[key]
print(prec(precision)) #精度发生变化,打印出来
#根据机械臂自由度给joint_states话题赋予消息
if mode:
jointState.header.stamp = rospy.Time.now()
jointState.name=["joint1","joint2","joint3","joint4"]
jointState.position=joints[0:4]
else:
jointState.header.stamp = rospy.Time.now()
jointState.name=["joint1","joint2","joint3","joint4","joint5","joint6"]
jointState.position=joints
pub.publish(jointState) #ROS发布关节状态话题
elif key ==" ":
joints = [0,0,0,0,0,0]
#运行出现问题则程序终止并打印相关错误信息
except Exception as e:
print(e)
#程序结束前发布速度为0的速度话题
finally:
print("Keyboard control off")
#程序结束前打印消息提示
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)感觉判断的地方有点小拉跨
所有的python 写完记得
sudo chmod 777 *.py启动桌面机器人的基础服务
roslaunch table_arm base_serial.launch
启动
roslaunch table_arm arm_opencv_move.py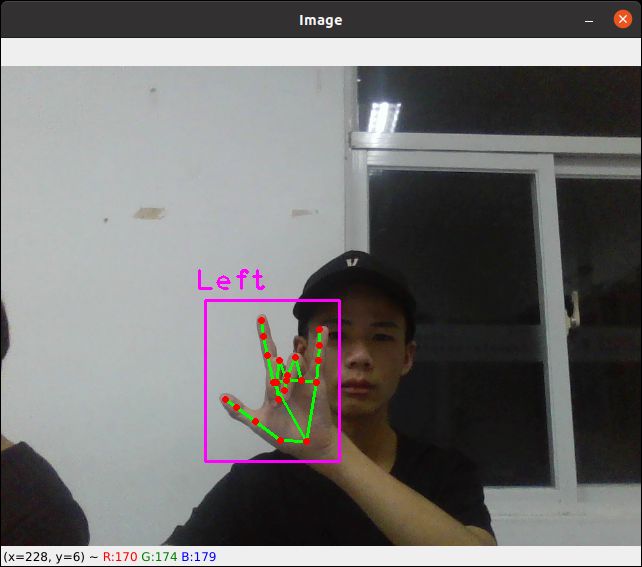
机器臂直立 R&K 直立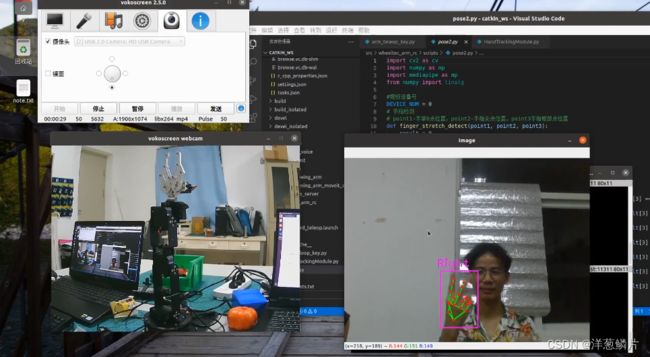
ros_opencv_机器爪控制-2_哔哩哔哩_bilibili