i.MX 6ULL 驱动开发 十:按键中断(阻塞处理)
一、IO 模型
五种网络IO模型_Oh-Why_not的博客-CSDN博客_五种网络io模型
二、Linux 内核等待队列
Linux 内核等待队列_爱洋葱的博客-CSDN博客_内核等待队列
三、Linux 中断基本概念
i.MX 6ULL 驱动开发 九:中断(非阻塞处理)_lqonlylove的博客-CSDN博客
四、按键原理
i.MX 6ULL 驱动开发 九:中断(非阻塞处理)_lqonlylove的博客-CSDN博客
五、设计思路
1、初始化等待队列头。
2、应用程序使用 read 读取按键值时,当条件不满足时,在驱动程序 read 函数中添加等待队列项,并设置当前进程休眠。
3、当按键值满足时,唤醒当前进程。
六、添加设备树
1、确定引脚
通过原理图可以确定 key 使用 UART1_CTS 引脚。
2、查找引脚定义是否冲突
3、添加 pinctrl 子系统相关配置
pinctrl_key: keygrp {
fsl,pins = <
MX6UL_PAD_UART1_CTS_B__GPIO1_IO18 0xF080 /* KEY0 */
>;
};
4、添加 gpio 子系统相关配置
key {
#address-cells = <1>;
#size-cells = <1>;
compatible = "lq-key";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key>;
key-gpio = <&gpio1 18 GPIO_ACTIVE_LOW>; /* KEY0 */
status = "okay";
};
5、添加 interrupts 相关配置
key {
#address-cells = <1>;
#size-cells = <1>;
compatible = "lq-key";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key>;
key-gpio = <&gpio1 18 GPIO_ACTIVE_LOW>; /* KEY0 */
interrupt-parent = <&gpio1>;
interrupts = <18 IRQ_TYPE_LEVEL_LOW>; /* 低电平触发 */
status = "okay";
};
主要添加 interrupt-parent 和 interrupts 属性。
6、测试
1、编译设备树
onlylove@ubuntu:~/my/linux/linux-imx-4.1.15$ make dtbs
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[1]: 'include/generated/mach-types.h' is up to date.
CHK include/generated/bounds.h
CHK include/generated/asm-offsets.h
CALL scripts/checksyscalls.sh
DTC arch/arm/boot/dts/imx6ull-alientek-emmc.dtb
DTC arch/arm/boot/dts/imx6ull-alientek-nand.dtb
onlylove@ubuntu:~/my/linux/linux-imx-4.1.15$
2、拷贝编译成功的设备树文件
onlylove@ubuntu:~/my/linux/linux-imx-4.1.15$ ls /home/onlylove/my/tftp/ -l
total 11528
-rwxrwxr-x 1 onlylove onlylove 5901744 Sep 17 04:04 zImage
-rwxrwxr-x 1 onlylove onlylove 5901752 Aug 20 01:24 zImage.bak
onlylove@ubuntu:~/my/linux/linux-imx-4.1.15$ cp arch/arm/boot/dts/imx6ull-alientek-emmc.dtb /home/onlylove/my/tftp
onlylove@ubuntu:~/my/linux/linux-imx-4.1.15$ ls /home/onlylove/my/tftp/ -l
total 11568
-rw-rw-r-- 1 onlylove onlylove 39084 Sep 23 21:18 imx6ull-alientek-emmc.dtb
-rwxrwxr-x 1 onlylove onlylove 5901744 Sep 17 04:04 zImage
-rwxrwxr-x 1 onlylove onlylove 5901752 Aug 20 01:24 zImage.bak
onlylove@ubuntu:~/my/linux/linux-imx-4.1.15$
3、启动 linux 查看设备树解析是否成功
/ # cd /proc/
/proc # ls
1 41 65 driver mounts
10 46 66 execdomains mtd
11 47 7 fb net
12 48 8 filesystems pagetypeinfo
13 49 83 fs partitions
14 5 84 interrupts self
15 50 9 iomem softirqs
16 51 95 ioports stat
17 52 asound irq swaps
18 53 buddyinfo kallsyms sys
19 54 bus key-users sysrq-trigger
2 55 cgroups keys sysvipc
20 56 cmdline kmsg thread-self
21 57 consoles kpagecount timer_list
22 58 cpu kpageflags tty
23 59 cpuinfo loadavg uptime
24 6 crypto locks version
3 60 device-tree meminfo vmallocinfo
4 61 devices misc vmstat
40 62 diskstats modules zoneinfo
/proc # cd device-tree/
/sys/firmware/devicetree/base # ls
#address-cells key
#size-cells memory
aliases model
alphaled name
backlight pxp_v4l2
beep regulators
chosen reserved-memory
clocks sii902x-reset
compatible soc
cpus sound
gpioled spi4
interrupt-controller@00a01000
/sys/firmware/devicetree/base # cd key/
/sys/firmware/devicetree/base/key # ls
#address-cells interrupt-parent name status
#size-cells interrupts pinctrl-0
compatible key-gpio pinctrl-names
/sys/firmware/devicetree/base/key # cat compatible
lq-key
/sys/firmware/devicetree/base/key #
/sys/firmware/devicetree/base/key #
七、驱动编写
#include "linux/init.h"
#include "linux/module.h"
#include "linux/kdev_t.h"
#include "linux/fs.h"
#include "linux/cdev.h"
#include "linux/device.h"
#include 八、应用程序编写
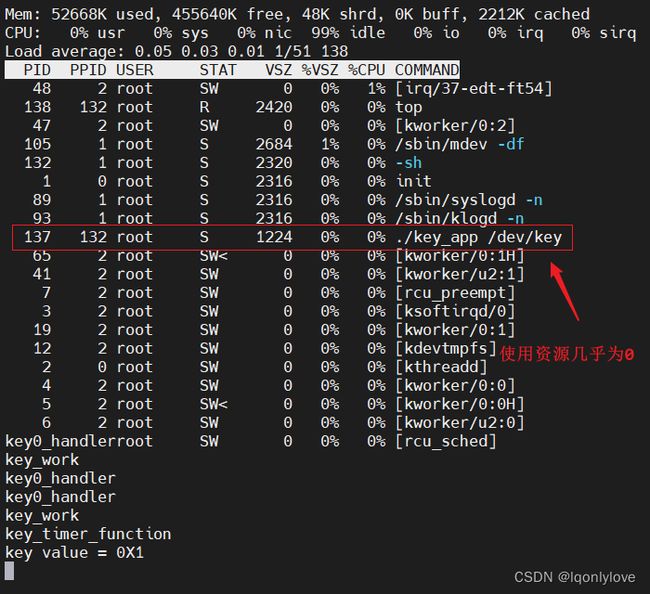
#include 九、系统资源使用情况