学习SAR和INSAR的一点随笔
只是随笔,可能有些杂乱。还是个小透明,多多包涵
- 成像雷达历史
1951 年 , 美国人 Carl Wiley 首次发现 多普勒频移现象能用来逻辑地合成一个更大的雷达 孔径 , 可显著地改善 RAR 方位向分辨率 , 使之从公 里级提高到米级 , 从而真正满足遥感观测的基本要 求。进入上世纪 60 年代, 第一个合成孔径雷达成像 系统 (SAR)诞生了 。
SAR 的前身——————真实孔径成像
图
飞机卫星或航天飞机雷达以一定的侧视角 θ发射一个椭圆锥状的微波脉冲束, 然后将目标散射回来的信息进行处理分析。
二战的时候就被装在飞机上进行应用。但是人们发现延飞行方向,也就是方位向的分辨率很低。,一般为数公里。
1.距离向。侧视方向上的分辨率
方位向,飞行方向
2.SAR图像的清晰程度完全取决于他们在距离向和方位向的分辨性能
3.高分辨,指的是分辨单个目标上多个散射中心的能力。它并不是区分不同的目标,而是对同一目标上不同散射中心的分辨。
高分辨雷达,可以说是目标探测/分类识别的一个基础。
合成孔径和真实孔径成像,他们在距离上的分辨率都是一样的。
实孔径雷达通过控制波束的宽度来获得方位向的分辨。它依赖的是天线的物理特性,看图。
图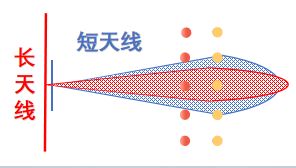
它在方位向上的分辨率是跟距离有关系的。对于短天线来说,目标的距离越远的话,分辨性能就越差,距离近的话波束就窄,分辨性能就好。但如果是长天线的话,它获得的波束更窄,获得的分辨性能明显是优于短天线的情况的,可以总结,在每个方位向上的波束宽度和雷达长度是成反比的,天线越长的话波束宽度越窄分辨性能就越高。因此要有更好的方向分辨率,我只能加大天线的口径。
那我们还要专门再来看一下分辨率这个十分重要的参数
距离向 可以通过控制雷达的波形参数,比如说信号类型,重复周期/算法等等来实现,它可以达到从几米到几十米的一个分辨率。
方位向 取决于雷达的载波频率 以及在成像期间目标相对于雷达视角的一个变化。
通常意义而言,SAR系统一般是机载或者星载,在高空对地面进行投射,执行对地,海观测,一般是静止目标。
对于机载和星载雷达来说 ,波长选定的情况下, 由于受硬件条件限制 , 不可能获得非常窄的脉冲宽度和很大的天线孔径 , 因此难以获得很高的分辨率 。
能不能用很短的天线,利用运动合成,通过时间的积累,来获取跟这个大天线相同的方位向上的分辨性能呢。这个问题就催生了SAR 的,这个合成孔径的发明。
而利用的原理,就是多普勒频移现象
图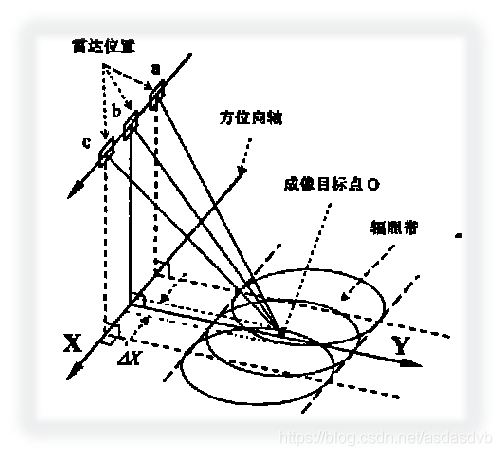
显示了合成孔径侧视雷达成像的几何构成 。设一个具有长度为 L 的真实孔径雷达天线从点 a 移动到点 b 再到 c , 则被成像点 O 的雷达斜距会由大变小再变大, 这样雷达接收从地面点 O 反射回来的脉冲频率会产生变化 , 即频率漂移由大变小 。通过精确测定这些接收脉冲的雷达相位延迟并跟踪频率漂移 , 最后可相应地合成一个脉冲 , 使方位向的目标被锐化 (sharpening), 即提高方位向分辨率 (如图 4 所示)。
相对于真实孔径雷达方位向分辨率来说, 合成孔径雷达的方位向分辨率被大大地改善
SAR
合成孔径雷达成像 就是我们用两个或多个相隔一定距离天线镜头来虚拟一个大的虚拟口径,可以要用真正的两个天线,也可以让一个天线在两个或多个位置测量几次,再把测量结果累积合成,同样达到大的虚拟口径提高角分辨率。即通过移动天线位置来合成孔径。
例如下图
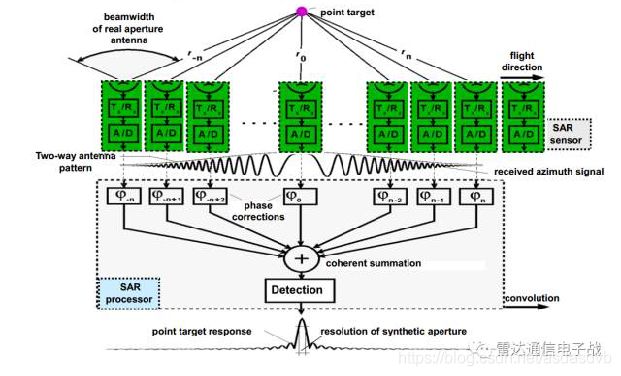
装载雷达的飞行器沿着从左至右的飞行方向
雷达持续向外发射波束宽度如图所示的电磁脉冲
然后接收到目标散射回来的一个二维的脉冲信号
通过精确测定这些接收脉冲的雷达相位延迟,进行相位校正,得到相干和
最后输出带有灰度信息和相位信息的SAR图像.

从数据处理的层面看
目标场景 经过 脉冲调制 方位调制 脉冲压缩 方位压缩 检测
SAR图像
SAR 影像的每一像素不仅包含反映地表微波反射强度即所谓的灰度值, 而且还包含与雷达斜距(一般取样到垂直于平台飞行方向的斜距上)有关的相位值 , 这两个信息分量可用一个复数表示。
这就说明了 SAR 图像 像素所记录的相位信息不仅包含距离信息 , 而且还 包含地面分辨元诸要素的附加相位贡献, 而后者表 现出极大的随机性 , 因此一般被视为噪声, 对干涉分析带来不便。
INSAR
INSAR 获取DEM的基本原理是利用具有干涉成像能力的两幅SAR天线(或者一副sar天线重复观测),来获取同一地区具有一定视角差的两幅具有相干性的单视复数图像,并根据其干涉信息反演地表的高程信息,从而重建相应地区的DEM.
从多幅SAR 影像来提取有用信息, 更确切地说, 是从它们所产生的干涉相位图来提取地形或形变信息。
单天线干涉使用一副天线,由于两次成像之间具有一定的时间间隔,地面状况和散射特性有可能发生变化,而且难以保证合适的基线参数,,因此获取的两幅图像相干性较差。
双天线干涉可以同一时间获取到同一地区的主辅图像,图相间的相干性较好,有利于干涉处理和应用。硬件要求高,成本高
InSAR 高程测量原理

贝塔 是通过余弦定理计算出来的
代尔塔 R 在双天线的SAR系统中 是通过理论干涉相位推导出来的。这可以通过相位解馋得到。。
所以如果我们就可以较为粗略的,根据已经定标好的干涉参数
通过解馋干涉相位反演出地面点的高程h,
流程

首先对主、辅图像进行子像元级的配准处理,来获得可靠的干涉相位。
的配准就是计算主影像与从影像之间的影像坐标映射关系,再利用这个关系对待配准影像实行坐标变换和重采样。
对于双天线SAR ,一般分为像元级匹配,子像元级匹配和配准模型三部步。如果是单天线重复轨道INSAR,则需要粗匹配,像元级匹配,子像元级匹配和配准模型四部。
同时可在距离向和方位向进行预滤波处理,以提高匹配图精度。这主要是为了去除主辅图像间在距离向和方位向上的频谱偏移。可以根据偏移量的大小确定是否采用,一般是不需要的
计算出配准模型后,对主辅图像的复数值进行重采样,相应像元的复数值共轭相乘,得到干涉强度图。
。将覆盖同一地区的两幅雷达 图像对应像素的相位值相减可得到一个相位差图 , 即所谓干涉相位图 (Interferogram)。这些相位差信息是地形起伏和地表形变 (如果存在)等因素贡献 和的体现[ 1] 。 InSAR 正是利用这些具有高敏感特性 的干涉相位信号来提取和分离出有用信息
为了降低干涉图的条纹频率,减少干涉图滤波和降低相位解缠的难度,接下来可以进行去平地效应工作,(去掉延方位向的一系列竖直平行条纹)
干涉图滤波一般采用零中频矢量滤波方法进行滤波处理,去除干涉图中因为地面散射特性变化,匹配误差和系统热噪声等因素而产生的大量相位噪声。这也是为了让相位解缠的效果更好
为了评价干涉质量的好坏,还要计算相干图、伪相干图等干涉质量图(高相干区呈亮色调,低相干区呈暗色调)。
接下来的相位解缠是用一定的数学方法和计算方法对干涉图进行处理,得到各像元干涉相位之间相差的整周期数,从而获得连续变化干涉相位的过程。
因为在计算相位差的时候,干涉相位的整周数部分是未知的 , 确定干涉相位图中每一像素的相位差整周数,这类似于 GPS 中 的整周模糊度确定问题
常用的方法例如最小范数法或者最小二乘法
然后进行基线参数估计和干涉参数定标,获得地面点的高程信息。
就可以进行DEM重建和正射影像制作。
3.软件
哨兵一号工具箱是由欧空局开发的开源SAR图像处理工具。S1TBX软件的主要功能是读取SAR数据,并实现校准、正射纠正、图像融合、干 涉 处 理、影 像 重 投 影、滤 波 以 及 其 他 数 据 处理。
元数据。矢量数据。 连接点网格。 快看。 条带
3个子通道。每个子路径用于TOPS模式的相邻 采集。
在子瓦中,TOPS数据以突发方式获取。每个爆发由分界区分隔。分界区域内的任何“数据”都可视 为无效,应填零,但可能包含垃圾值。
两个包含复杂 数据的实部(i)和虚部(q)的带。i和q波段是产品中实际存在的波段。虚拟强度带可以处 理复杂数据。
数字高程模型 SRTM3是90米精度的地形数据
插值方法 选双线性插
通过空间配准进行影像的平移、旋转和尺寸改正以及辅影像重采样实现两幅
或多幅影 像 的 精 确 配 准。选择一幅影像作为主影像,其他作为辅影像,设置好地面控制点的个数、搜索窗口的大小以及插值方法等参数,即可实现主辅影像的自动配准[7
干涉 产品 干涉图拟合
将影像配准之后,就可以将复数影像进行共轭相乘生成干涉相位图以供相位解缠,同时生成干涉强度图和相干系数图,以便对相位数据的质量进行评价。
相关系数图
干涉相位图相对应的相关图(Coherence map),以此来描述干涉相位的质量。从计算机显示效果来看,越亮的区域,相关系数越高,干涉相位的条纹越清晰,干涉相位观测量越可靠,反之,相关系数越低,干涉条纹越模糊,干涉相位噪声越大。
去平地效应干涉相位可以分为参考相位、地形相位、形变相位和噪声等4部分。S1TBX 软件在生成干涉纹图的过程中已经去除了参考相位,为了进行形变分析或其他研究,可以将地形相位从干涉纹图中分离出来。
干涉 产品 地形象移除
去噪(滤波)
去除干涉图中的大量相位噪声
干涉图产品并转到过滤。选择Goldstein阶段过滤。