李宏毅机器学习33——GAN(5)
摘要:
这节课主要学习了GAN背后的理论知识,主要是原理和数学推导。
由于GAN是两部分组成的,这节课学习也是分为生成器生成图片的原理与判别器的原理。
对生成器而言,想要生成符合要求目标,需要在高维空间中选取出样本的分布情况。将选取的样本通过生成器,得到Pg。希望Pg与目标样本Pdata尽可能接近,这个过程其实就是求这两个分布的KL散度。
对于判别器而言,虽然不知道两个分布的具体公式,但是通过分别sample出两个数据集,对其进行分数评估,得到目标函数。
之后将判别器与生成器的目标函数联系起来,就是GAN的目标函数。
对于整体的目标函数,理论方法进行了一些假设,与实际情况还略有不同。
目录
一、GAN背后的理论
二、极大似然估计
三、generator
四、discrimination
五、整理公式
算法过程:
实际做法:
算法总结:
总结:
Theory behind GAN
一、GAN背后的理论
对抗网络GAN是由生成器Generator最终生成图片、文本等结构化数据。
生成器能生成结构化数据的原理是什么呢?
假设今天的任务是生成固定的图片,实际上我们是在一个已知的image space中,选出分布Pdata(x),在这个分布中的图片都是符合我们选取要求的。

二、极大似然估计
在GAN之前,我们采取极大似然估计的方法,去找到这个分布Pdata(x)
极大似然估计的做法:
1.我们首先有目标数据的概率密度函数Pdata(x)
我们只能从Pdata(x)中sample。
2.我们设定Generator的概率密度函数为Pg(x;θ)
假设Pg是高斯分布,θ代表高斯分布的均值和方差,我们希望通过调整参数θ,是Pg与Pdata(x)尽可能接近。
3.从 Pdata(x)中sample样本x1,x2,,,xm。然后我们计算每个样本中Pg的值。
4.对这m个Pg的概率进行相乘,通过调整参θ,让L最大。

极大似然函数的推导过程

KL散度(KL divergence)就是衡量两个分布的差异性的公式,越小差异性越小。当然也可以用其他计算差异性的公式来计算。
通过一系列的推导,得出极大似然估计=最小KL散度
所有机器学习中的最大似然估计,其实就是最小化我们要寻找的目标分布Pg和Pdata的KL散度。
那么现在的问题就是如何定义Pg
三、generator
生成器G是一个网络,它定义了一个可能的分布Pg
每次从normal distribution中选出一个z,丢给生成器,产生一个x。最终产生出x的集合,就是另外一个distribution。而我们的目标就是让这两个distribution越接近越好。
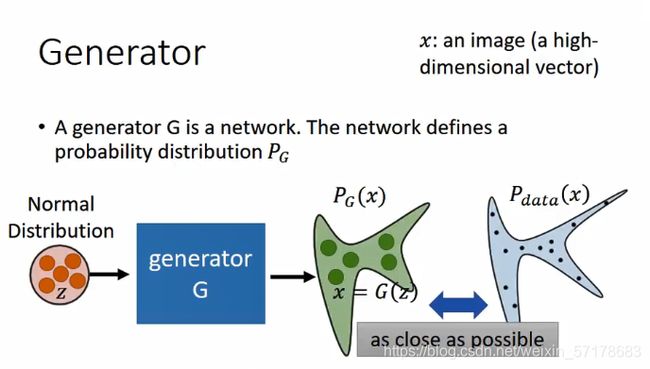
这就用到上面的推导结论:计算Pg和Pdata,让它们的散度越小越好。
目前我们不知道Pg和Pdata的公式,这就需要用到判别器了。

四、discrimination
虽然我们不知道Pg和Pdata的公式,但是sample出一些样本,对于Pdata来说,我们之间从数据集中进行sample,对于Pg来说,我们可以按照上图的方法,通过generator进行sample。
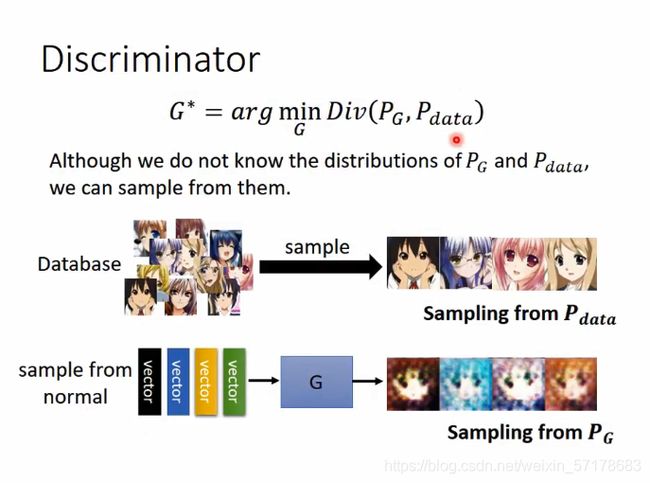
有了这两个sample的数据集,通过判别器就可以计算了。
判别器的目标函数:

这个目标函数的意思是,假设x是从Pdata里面sample出来的的,那么希望logD(x)越大越好:假设x是从Pg中sample出来的,就希望它的值越小越好。
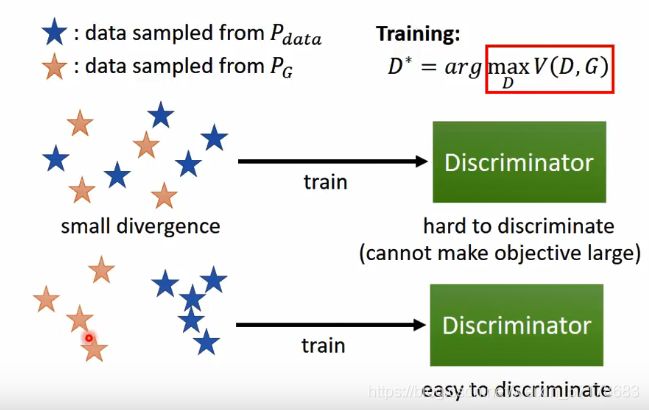
训练的时候就是用函数D,来max V(G,D)
这个公式其实和逻辑回归的二分类目标函数是一样的,将两个sample集合看做是两个分类,训练Discriminator就好比训练一个二分类。
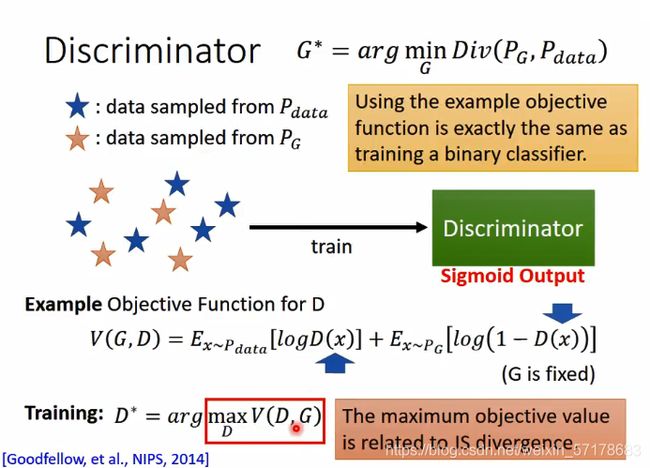
训练到最后发现得到的D,其实就是JS divergence
将整个流程理解成二分类,那么当两个类别很紧密时,判别器很难区别这两个类别的不同。这样训练下去,二分类的目标函数loss很难被压低。回过头来,这也就意味着很难找到一个D,让V(D,G)变得很大。这意味着这两堆data,它们是非常接近的,也就是small divergence。
数学推导:
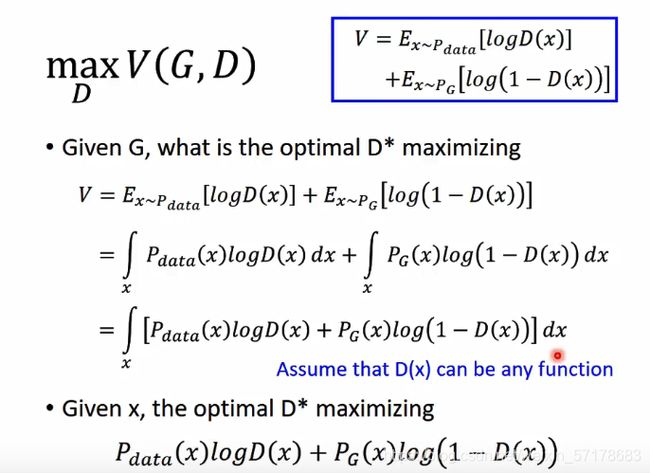
对V(G,D)进行整理,这里要注意有一个假设D(x)可以为任意函数。
(实际上只有network无限大才能达到这个要求)
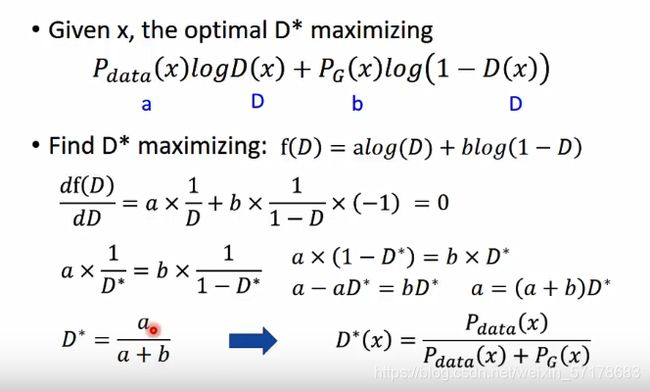
对D(X)求微分,得到D(X)的值,之后将得到的值带入到原式中,整理。在D(X) 项的分子分母同时成1/2,又将分子中的1/2提出,得到-2log2。
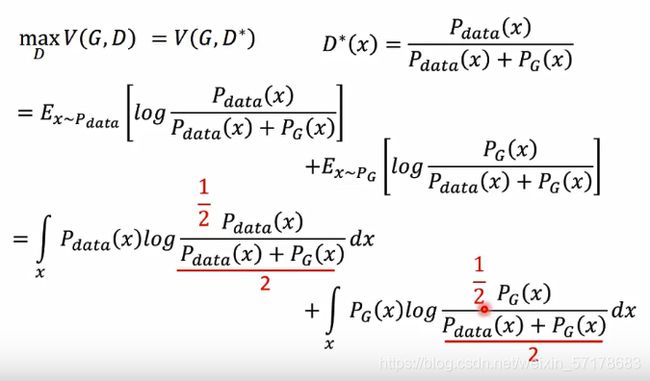
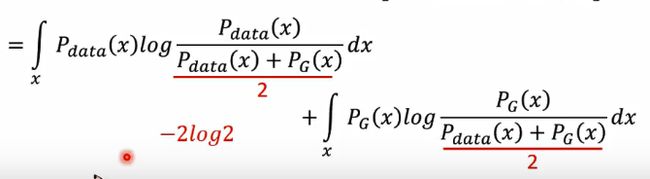

这是最后一步的变换公式:

Pg和Pdata越远,后两项和越大。
总结判别器这部分:
当我们在训练一个判别器的时候,就是在评估从Pg和Pdata中sample出两个数据集,它们之间的JS divergence。(也就是相似程度)
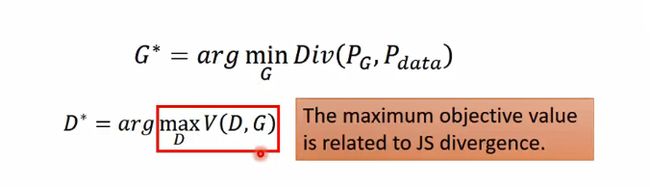
五、整理公式
原本生成式目标函数中Div(Pg,Pdata)由于不知道Pg和Pdata是无法计算的。
但是通过判别式目标函数,经过上面一系列的计算,求出maxD*,这个D*其实就是Div(Pg,Pdata)。之后我们将这部分替换掉。
将
变成:
模拟G*的求解过程:(假设只有三个不同的G)
横坐标变换代表选择不同的判别器

首先,先看每个G中V(G,D)最大的值

然后,在这三个点,选择一个G,可以最小化这个V(G,D)
所以最后选择了G3
这里绿线的高度表示Pg和Pdata之间的divergence

接下来就是求解G*的过程了、
之前将GAN的训练方法,一般分成两部分:
第一步是初始化生成器和判别器。
第二步是先固定生成器,去训练判别器,然后固定判别器,去训练生成器,这个过程要重复多次。

算法过程:
先将maxV(G,D)取出来,用L(G)表示,对G求微分。(假设D(x)已知,看做常量)
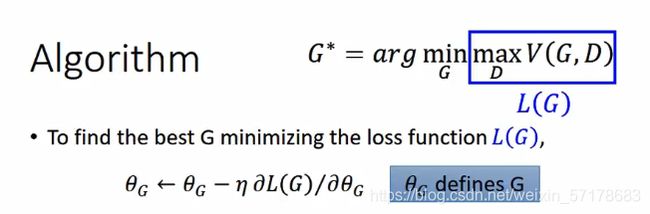
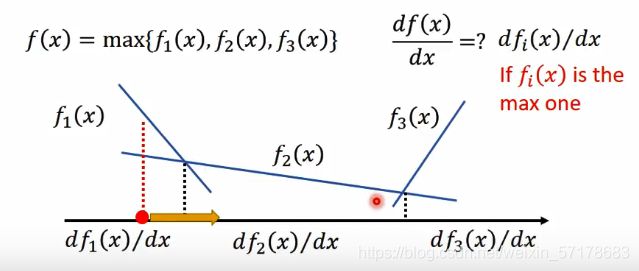
对于max函数如何求微分,李老师还拿了分段函数进行具体举例
一开始有初始的G0,计算L(G)对G的微分。
先找到让V最大的D0*。(这个过程可以使用梯度上升)
微分,更新参数,得到新的G1。
再找到让V最大的D1*。
微分,更新参数,得到新的G2
……
实际做法:
实际上在做GAN的时候,是没法算Ex的,所以都是sample代替的,我们分别将Pdata和Pg中 sample的数据丢给D,计算出分数求平均值,求得V的均值,这个过程其实就是在训练一个二分类的模型。

算法总结:
将整个算法总结起来:也就是第一节课看到的表
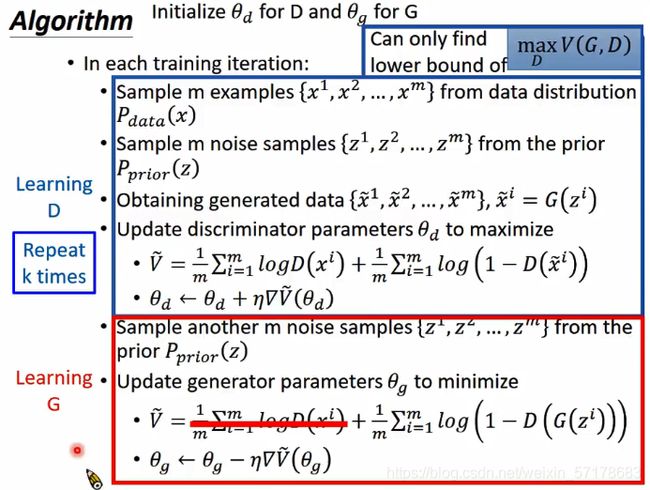
总结:
在没有GAN之前,一般用极大似然估计来进行生成,但是极大似然估计有其局限性,当函数比较简单时,就没办法很好的解决问题,当函数太过复杂,可能无法求解。于是便有了生成器,用神经网络作为函数,理论上来说,如果神经网络足够大,就可以构成所有的函数,而其求解时可以用优化方法自动求解,很好的突破了极大似然估计的局限性。在训练时,我们还需要一个判别器,用来对生成数据与训练数据进行比较,判别器主要是衡量生成数据和训练数据的差距,再反馈给生成器,生成器知道差距后就去缩小差距,完善后再次将生成数据丢给判别器,这样循环往复,直至找到合适的生成器,这就是GAN的全部流程。