【openCV】利用python-opencv的SIFT拼接两张分别残缺一部分的图片
如果原先没有opencv环境
直接使用清华源安装最新的opencv版本即可
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple我这安装的是opencv-python-4.6.0.66版本
代码段如下:
关键代码已做相关注释
# -*- coding: utf-8 -*-
"""
Created on Mon May 30 15:31:08 2022
默认图像DPI为300
支持jpg格式图像
有疑问联系作者:[email protected]
"""
import cv2
import numpy as np
def get_homo(img1,img2):
#创建特征转换对象
#opencv版本较高使用cv2.SIFT_create()
sift = cv2.SIFT_create()
#opencv版本较低使用cv2.SIFT_create()
#sift = cv2.xfeatures2d.SIFT_create()
#获取特征点和描述子
k1,d1 = sift.detectAndCompute(img1,None)
k2,d2 = sift.detectAndCompute(img2,None)
#创建特征匹配器
bf = cv2.BFMatcher()
#使用描述子进行一对多的描述子匹配
maches = bf.knnMatch(d1,d2,k=2)
#筛选有效的特征描述子存入数组中
verify_matches = []
for m1,m2 in maches:
if m1.distance <0.8*m2.distance:
verify_matches.append(m1)
#单应性矩阵需要最低四个特征描述子坐标点进行计算,判断数组中是否有足够,这里设为6更加充足
if len(verify_matches) > 6:
#存放求取单应性矩阵所需的img1和img2的特征描述子坐标点
img1_pts = []
img2_pts = []
for m in verify_matches:
#通过使用循环获取img1和img2图像优化后描述子所对应的特征点
img1_pts.append(k1[m.queryIdx].pt)
img2_pts.append(k2[m.trainIdx].pt)
#得到的坐标是[(x1,y1),(x2,y2),....]
#计算需要的坐标格式:[[x1,y1],[x2,y2],....]所以需要转化
img1_pts = np.float32(img1_pts).reshape(-1,1,2)
img2_pts = np.float32(img2_pts).reshape(-1,1,2)
#计算单应性矩阵用来优化特征点
H,mask = cv2.findHomography(img1_pts,img2_pts,cv2.RANSAC,5.0)
return H
else:
print("error")
def stitch_image(img1,img2,H):
#1、获得每张图片的四个角点
#2、对图片进行变换,(单应性矩阵使)
#3、创建大图,将两张图拼接到一起
#4、将结果输出
#获取原始图的高、宽
h1,w1 = img1.shape[:2]
h2,w2 = img2.shape[:2]
#获取四个点的坐标,变换数据类型便于计算
img1_dims = np.float32([[0,0],[0,h1],[h1,w1],[w1,0]]).reshape(-1,1,2)
img2_dims = np.float32([[0,0],[0,h2],[h2,w2],[w2,0]]).reshape(-1,1,2)
#获取根据单应性矩阵透视变换后的图像四点坐标
img1_transform = cv2.perspectiveTransform(img1_dims,H)
#img2_transform = cv2.perspectiveTransform(img2_dims,H)
#合并矩阵 获取最大x和最小x,最大y和最小y 根据最大最小计算合并后图像的大小;
# #计算方式: 最大-最小
result_dims = np.concatenate((img2_dims,img1_transform),axis = 0)
#使用min获取横向最小坐标值,ravel将二维转换为一维,强转为int型,
# 最小-0.5,最大+0.5防止四舍五入造成影响
[x_min,y_min] = np.int32(result_dims.min(axis=0).ravel()-0.5)
[x_max,y_max] = np.int32(result_dims.max(axis=0).ravel()+0.5)
#平移距离
transform_dist = [-x_min, -y_min]
#齐次变换矩阵
transform_arary = np.array([[1,0,transform_dist[0]],
[0,1,transform_dist[1]],
[0,0,1]])
#输出图像的尺寸
ww = x_max-x_min
hh = y_max-y_min
#透视变换实现平移
result_img = cv2.warpPerspective(img1,transform_arary.dot(H),(ww,hh))
#将img2添加进平移后的图像
result_img[transform_dist[1]:transform_dist[1]+h2,
transform_dist[0]:transform_dist[0]+w2] = img2
return result_img
#读取两张图片
img2 = cv2.imread("C:\\Users\\14533\\Desktop\\test\\aaa.jpg")
img1 = cv2.imread("C:\\Users\\14533\\Desktop\\test\\bbb.jpg")
H = get_homo(img1,img2)
result_img = stitch_image(img1,img2,H)
cv2.imwrite("C:\\Users\\14533\\Desktop\\test\\ccc.jpg", result_img, [int(cv2.IMWRITE_JPEG_QUALITY), 100])
效果图如下:
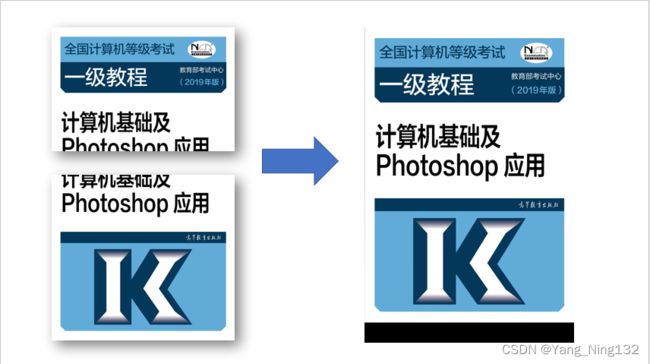
生成的图片会根据原图片合成后的最大长宽作为尺寸,会出现余出黑色块的情况,按需截掉即可,或者自行调整成需要的颜色。