【ROS机器人】 --- 2-4. 路径规划_move_base
“我回来啦”
- 前期准备
- 基础知识
-
- 1、action通信
- 2. 代价地图及组成
- 3. 碰撞算法
- 文件详解及过程
-
- I、集成参数的launch文件
- II、配置文件
-
- 1. costmap_common_params.yaml
- 2.global_costmap_params.yaml
- 3. local_costmap_params.yaml
- 4. base_local_planner_params
- III、编写执行launch文件
- IV、执行查看
- 源码
-
- nav3_set_yaml.launch
- nav3_all_navagation.launch
- base_local_planner_params.yaml
- costmap_common_params.yaml
- global_costmap_params.yaml
- local_costmap_params.yaml
本节目标:加载一张地图,在地图中放置一个机器人,根据代价地图,膨胀等进行路径规划并自动导航。
实现:
- 打开gazebo和模型文件(car_move.launch)
- 运行move_base相关launch文件(含rviz)
- 启动机器人
- 配置rviz,并保存为新的rviz文件存入launch文件中
前期准备
- 延用工作空间test2_ws;
- 功能包demo5_navigation存放代码;
- move_base和rviz代码在demo5_navigation/launch/nav3_set_yaml.launch和nav3_all_navagation.launch;
- 对于move_base用到的参数全放在demo5_navigation/param/文件夹下;
- rviz配置在demo5_navigation/config/rviz/nav3_movebase.rviz;
基础知识
1、action通信
在本节的设置目标点以及导航的过程完全可以使用service服务通信,为什么要使用action通信呢?
- 简而言之,当我们需要服务器传输的数据较大时,这可能要花费一些时间,在数据传输未完成时,对客户端来说有一个等待时间,此时客户端没反映,会让客户端误以为卡死;
- 此时,action通信就有了作用,它能持续给客户端发送信息,一个类似于进度条功能的东西,这就是action通信的作用,能防止客户端由于久没接受到信息而误判。
2. 代价地图及组成
代价地图有两张:global_costmap(全局代价地图) 和 local_costmap(本地代价地图)。
前者用于全局路径规划,后者用于本地路径规划。
两张代价地图都可以多层叠加,一般有以下层级:
Static Map Layer:静态地图层,SLAM构建的静态地图。
Obstacle Map Layer:障碍地图层,传感器感知的障碍物信息。
Inflation Layer:膨胀层,在以上两层地图上进行膨胀(向外扩张),以避免机器人的外壳会撞上障碍物。
Other Layers:自定义costmap。
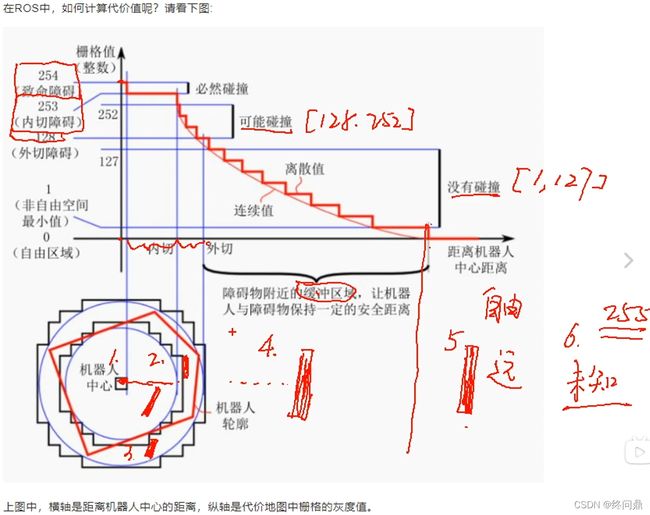
3. 碰撞算法
文件详解及过程
接下来再修改一下move_base包下的move_base节点的几项参数即可来适应我们的机器人了:
roscd amcl
cd examples
gedit amcl_diff.launch
I、集成参数的launch文件
主要是包含设置参数的launch文件:
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find 功能包)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find 功能包)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find 功能包)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find 功能包)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find 功能包)/param/base_local_planner_params.yaml" command="load" />
node>
launch>
II、配置文件
专用编写一个param文件夹来储存本节要用到的存参数的yaml配置文件。
参考一些成熟的机器人的路径规划实现,比如: turtlebot3。
github链接.先下载这些配置文件备用。
1. costmap_common_params.yaml
局路径规划与本地路径规划时调用的通用参数,包括:机器人的尺寸、距离障碍物的安全距离、传感器信息等。
2.global_costmap_params.yaml
该文件用于全局代价地图参数设置.
3. local_costmap_params.yaml
该文件用于局部代价地图参数设置.
4. base_local_planner_params
base_local_planner_params.yaml: 基本的局部规划器参数配置,这个配置文件设定了机器人的最大和最小速度限制值,也设定了加速度的阈值。
全局代价地图可以将膨胀半径和障碍物系数设置的偏大一些;
本地代价地图可以将膨胀半径和障碍物系数设置的偏小一些。
III、编写执行launch文件
文件为nav3_all_navagation.launch。
实现对获取参数yaml文件中的参数,配合rviz执行move_base导航等。
IV、执行查看
- 加载机器人模型(gazebo)
roslaunch demo4_urdf_gazebo car_move.launch

- 运行move_base路径规划
roslaunch demo5_navigation nav3_all_navagation.launch
- 配置rviz并保存
先add机器人模型robotmodel
再添加一个静态地图map,topic选择/map,此时地图就有了
添加posearray,设置话题和线束
添加laserscan,和话题/scan,设置size
添加odometry,话题/odom,去掉两个勾
至此,组件添加完毕,保存一下rviz即可nav3_movebase.rviz。
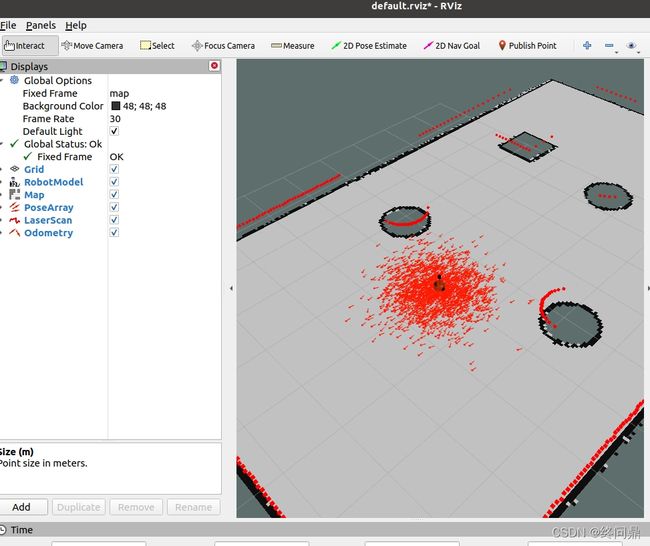
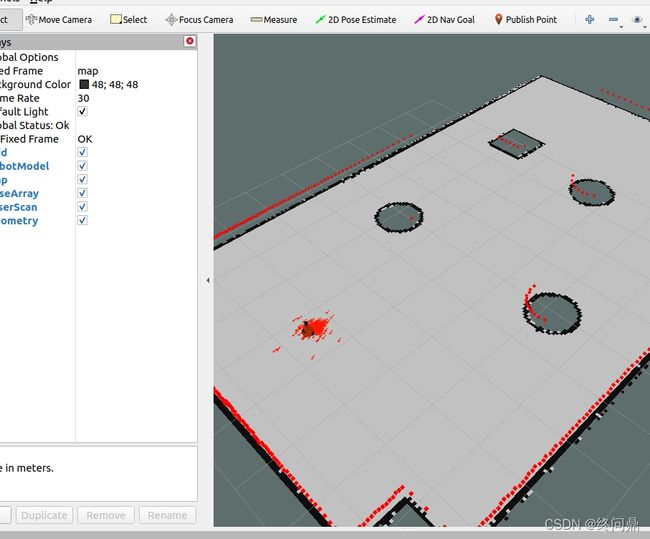
- 在地图上设置目标点:
在rviz上方,点击如下箭头输入目标点,点击左键长按拖拽改变方向,松开自动启动小车。
![]() 可以观察到小车已经开始自动规划路径:
可以观察到小车已经开始自动规划路径:

源码
nav3_set_yaml.launch
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find demo5_navigation)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find demo5_navigation)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find demo5_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find demo5_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find demo5_navigation)/param/base_local_planner_params.yaml" command="load" />
node>
launch>
nav3_all_navagation.launch
<launch>
<node name="map_server" pkg="map_server" type="map_server" args="$(find demo5_navigation)/map/nav.yaml"/>
<include file="$(find demo5_navigation)/launch/nav2_amcl.launch" />
<include file="$(find demo5_navigation)/launch/nav3_set_yaml.launch" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" />
launch>
base_local_planner_params.yaml
TrajectoryPlannerROS:
# Robot Configuration Parameters
max_vel_x: 0.5 # X 方向最大速度
min_vel_x: 0.1 # X 方向最小速速
max_vel_theta: 1.0 #
min_vel_theta: -1.0
min_in_place_vel_theta: 1.0
acc_lim_x: 1.0 # X 加速限制
acc_lim_y: 0.0 # Y 加速限制
acc_lim_theta: 0.6 # 角速度加速限制
# Goal Tolerance Parameters,目标公差
xy_goal_tolerance: 0.10
yaw_goal_tolerance: 0.05
# Differential-drive robot configuration
# 是否是全向移动机器人
holonomic_robot: false
# Forward Simulation Parameters,前进模拟参数
sim_time: 0.8
vx_samples: 18
vtheta_samples: 20
sim_granularity: 0.05
costmap_common_params.yaml
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint
robot_radius: 0.12 #圆形
# footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状
obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图
raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物
#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物
inflation_radius: 0.2
#代价比例系数,越大则代价值越小
cost_scaling_factor: 3.0
#地图类型
map_type: costmap
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
global_costmap_params.yaml
global_costmap:
global_frame: map #地图坐标系
robot_base_frame: base_footprint #机器人坐标系
# 以此实现坐标变换
update_frequency: 1.0 #代价地图更新频率
publish_frequency: 1.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.
local_costmap_params.yaml
local_costmap:
global_frame: odom #里程计坐标系
robot_base_frame: base_footprint #机器人坐标系
update_frequency: 10.0 #代价地图更新频率
publish_frequency: 10.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: false #不需要静态地图,可以提升导航效果
rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化
width: 3 # 局部地图宽度 单位是 m
height: 3 # 局部地图高度 单位是 m
resolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致
时隔三个月,导师的小项目我终于写完给甲方交付了80%了,趁着甲方检验,我又又又回归了!