什么是批标准化 (Batch Normalization)
什么是批标准化 (Batch Normalization)
每层都做标准化
你再也不用去理会过拟合中drop out、L2正则项参数的选择问题,采用BN算法后,你可以移除这两项了参数,或者可以选择更小的L2正则约束参数了,因为BN具有提高网络泛化能力的特性;再也不需要使用使用局部响应归一化层了(局部响应归一化是Alexnet网络用到的方法,搞视觉的估计比较熟悉),因为BN本身就是一个归一化网络层。
BN概述
就像激活函数层、卷积层、全连接层、池化层一样,BN(Batch Normalization)也属于网络的一层。在前面我们提到网络除了输出层外,其它层因为低层网络在训练的时候更新了参数,而引起后面层输入数据分布的变化。这个时候我们可能就会想,如果在每一层输入的时候,再加个预处理操作那该有多好啊,比如网络第三层输入数据X3(X3表示网络第三层的输入数据)把它归一化至:均值0、方差为1,然后再输入第三层计算,这样我们就可以解决前面所提到的“Internal Covariate Shift”的问题了。
 而事实上,paper的算法本质原理就是这样:**在网络的每一层输入的时候,又插入了一个归一化层,也就是先做一个归一化处理,然后再进入网络的下一层。**不过文献归一化层,可不像我们想象的那么简单,它是一个可学习、有参数的网络层。既然说到数据预处理,最强的预处理方法:白化。
而事实上,paper的算法本质原理就是这样:**在网络的每一层输入的时候,又插入了一个归一化层,也就是先做一个归一化处理,然后再进入网络的下一层。**不过文献归一化层,可不像我们想象的那么简单,它是一个可学习、有参数的网络层。既然说到数据预处理,最强的预处理方法:白化。
预处理操作选择
说到神经网络输入数据预处理,最好的算法莫过于白化预处理。然而白化计算量太大了,很不划算,还有就是白化不是处处可微的,所以在深度学习中,其实很少用到白化。经过白化预处理后,数据满足条件:a、特征之间的相关性降低,这个就相当于pca;b、数据均值、标准差归一化,也就是使得每一维特征均值为0,标准差为1。如果数据特征维数比较大,要进行PCA,也就是实现白化的第1个要求,是需要计算特征向量,计算量非常大,于是为了简化计算,作者忽略了第1个要求,仅仅使用了下面的公式进行预处理,也就是近似白化预处理:
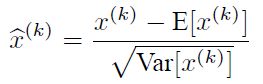
公式简单粗糙,但是依旧很牛逼。因此后面我们也将用这个公式,对某一个层网络的输入数据做一个归一化处理。需要注意的是,我们训练过程中采用batch 随机梯度下降,上面的E(xk)指的是每一批训练数据神经元xk的平均值;然后分母就是每一批数据神经元xk激活度的一个标准差了。
BN算法
经过前面简单介绍,这个时候可能我们会想当然的以为:好像很简单的样子,不就是在网络中间层数据做一个归一化处理嘛,这么简单的想法,为什么之前没人用呢?然而其实实现起来并不是那么简单的。其实如果是仅仅使用上面的归一化公式,对网络某一层A的输出数据做归一化,然后送入网络下一层B,这样是会影响到本层网络A所学习到的特征的。打个比方,比如我网络中间某一层学习到特征数据本身就分布在S型激活函数的两侧,你强制把它给我归一化处理、标准差也限制在了1,把数据变换成分布于s函数的中间部分,这样就相当于我这一层网络所学习到的特征分布被你搞坏了,这可怎么办?于是文献使出了一招惊天地泣鬼神的招式:变换重构,引入了可学习参数γ、β,这就是算法关键之处:
![]()
每一个神经元xk都会有一对这样的参数γ、β。这样其实当:
![]()
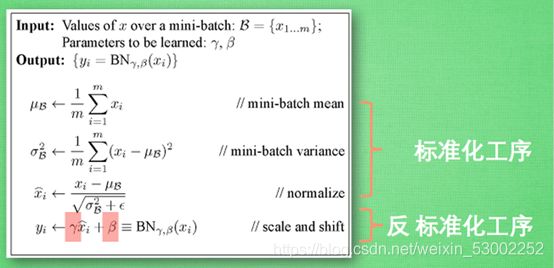
是可以恢复出原始的某一层所学到的特征的。因此我们引入了这个可学习重构参数γ、β,让我们的网络可以学习恢复出原始网络所要学习的特征分布。最后Batch Normalization网络层的前向传导过程公式就是:
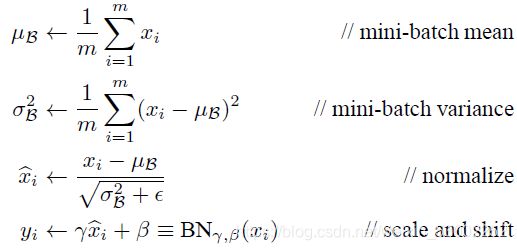
上面的公式中m指的是mini-batch size。
Batch Normalization,简称BatchNorm或BN,翻译为“批归一化”,是神经网络中一种特殊的层,如今已是各种流行网络的标配。在原paper中,BN被建议插入在(每个)ReLU激活层前面,如下所示,

Batch Normalization的正确打开方式:
Batch Normalization在TensorFlow中有三个接口调用 (不包括slim、Keras模块中的),分别是:
- tf.layers.batch_normalization
- tf.nn.batch_normalization
- tf.contrib.layers.batch_norm
通过观察这三个接口的参数列表可以得到一个初步的结论,tf.layers.batch_normalization和tf.contrib.layers.batch_norm可以用来构建待训练的神经网络模型,而tf.nn.batch_normalization一般只用来构建推理模型。简洁起见,本文把神经网络模型分为训练模式和推理模式(包括推理、测试和评估等)。由于tf.contrib包的不稳定性,本文将主要介绍如何使用tf.layers.batch_normalization这个方法在模型中添加BN layer。
tf.layers.batch_normalization()方法
方法接口如下:
tf.layers.batch_normalization(
inputs,
axis=-1,
momentum=0.99,
epsilon=0.001,
center=True,
scale=True,
beta_initializer=tf.zeros_initializer(),
gamma_initializer=tf.ones_initializer(),
moving_mean_initializer=tf.zeros_initializer(),
moving_variance_initializer=tf.ones_initializer(),
beta_regularizer=None,
gamma_regularizer=None,
beta_constraint=None,
gamma_constraint=None,
training=False,
trainable=True,
name=None,
reuse=None,
renorm=False,
renorm_clipping=None,
renorm_momentum=0.99,
fused=None,
virtual_batch_size=None,
adjustment=None
)
这里有几个重要参数需要注意:
- axis的值取决于按照input的哪一个维度进行BN,例如输入为channel_last format,即[batch_size, height, width, channel],则axis应该设定为4,如果为channel_first format,则axis应该设定为1.
- momentum的值用在训练时,滑动平均的方式计算滑动平均值moving_mean和滑动方差moving_variance。 后面做更详细的说明。
- center为True时,添加位移因子beta到该BN层,否则不添加。添加beta是对BN层的变换加入位移操作。注意,beta一般设定为可训练参数,即trainable=True。
- scale为True是,添加缩放因子gamma到该BN层,否则不添加。添加gamma是对BN层的变化加入缩放操作。注意,gamma一般设定为可训练参数,即trainable=True。
- training表示模型当前的模式,如果为True,则模型在训练模式,否则为推理模式。要非常注意这个模式的设定,这个参数默认值为False。如果在训练时采用了默认值False,则滑动均值moving_mean和滑动方差moving_variance都不会根据当前batch的数据更新,这就意味着在推理模式下,均值和方差都是其初始值,因为这两个值并没有在训练迭代过程中滑动更新。
TensorFlow中模型训练时的梯度计算、参数优化等train_op并没有依赖滑动均值moving_mean和滑动方差moving_variance,则moving_mean和moving_variance不会自动更新,所以必须加入负责更新这些参数的update_ops到依赖中,且应该在执行前向计算结束后、后向计算开始前执行update_ops,所以添加依赖的位置不能出错。实际中,只需要在构建模型代码中,添加完所有BN层之后获取update_ops就不会出错,切记!切记!这是TensorFlow的图计算模式造成的编程影响,在其他深度学习框架中可能会有差别。
BN算法用大白话描述就是,计算出当前batch的每个channel的均值mean,计算出当前batch的每个channel的方差variance,令输入减去均值再除以标准差delta,得到normalized输出x-hat,最后乘以scale参数gamma,加上shift参数beta,得到最终变换后的输出y。
BN层在train与inference时的差别:
在训练时,我们可以计算出batch的均值和方差,迭代训练过程中,均值和方差一直在发生变化。但是在推理时,均值和方差是固定的,它们在训练过程中就被确定下来。《Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift》中给出的确定方式和TensorFlow中存在不同,这里我们介绍TensorFlow中的方式,即采用滑动平均MovingAverage的方法,公式为: moving_average_value * momentum + value * (1 - momentum),其中value为当前batch的平均值或方差,moving_average_value为滑动均值或滑动方差。
最终,模型训练完毕后,在推理时使用滑动平均值moving_mean和滑动方差moving_variance对feature maps进行变换。
具体可查就看:
https://www.jianshu.com/p/437fb1a5823e