计算机视觉实践之角点检测--Python实现--sobel滤波--Harris矩阵--角点检测器R--非极大值抑制
文章目录
- 前言
- 一、方法原理
-
- 1. Harris角点检测
- 2. Sobel滤波
- 3.角点响应函数R
- 二、代码实现
-
- 1. **main函数**
- 2. **corner_detect函数**
- 三、结果对比
-
- 1.不同检测方法(对比一下使用角点检测器R与H矩阵最小特征值)
- 2.不同超参数k(使用角点检测器R,改变k值)
- 3.非最大值抑制(对3x3的邻域范围内非最大值抑制)
- 四、参考资料
前言
实现对图像的角点检测,编写Python程序能够对输入图像进行角点检测,并返回角点检测的结果,并且在可视化显示输出结果。
而具体的文件和代码,在如下链接里:计算机视觉实践之角点检测Python实现
使用的是pycharm,提前导入numpy和opencv库
一、方法原理
1. Harris角点检测
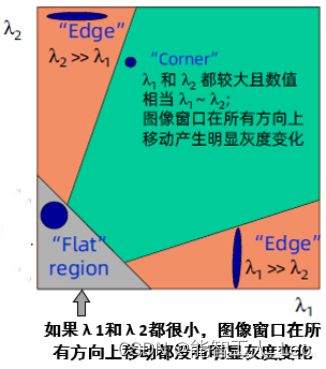
算法的核心是利用局部窗口在图像上进行移动,判断灰度是否发生较大的变化。如果窗口内的灰度值(在梯度图上)都有较大的变化,那么这个窗口所在区域就存在角点。
具体的方法是,计算像素点在水平方向和竖直方向的梯度组成的Harris矩阵,其矩阵特征值就反映了该点的像素值变化。
如果该点所对应的两个特征值都比较大,说明像素点的梯度分布比较散,梯度变化程度比较大,符合角点在窗口区域的特点;
如果是平坦区域,那么像素点的梯度所构成的点集比较集中在原点附近,因为窗口区域内的像素点的梯度幅值非常小,此时Harris矩阵的对角化的两个特征值都比较小;
如果是边缘区域,在计算像素点的水平方向和竖直方向上的梯度时,边缘上的像素点的某个方向的梯度幅值变化比较明显,另一个方向上的梯度幅值变化较弱,其余部分的点都还是集中原点附近,这样Harris矩阵的两个特征值理论应该是一个比较大,一个比较小,当然对于边缘,某些情况下致使计算出的特征值并不是都特别的大,但仍跟含有角点的窗口的分布情况具有不同。 Harris角点检测的性质:旋转不变性,光照不变性、比度变化部分不变性;同时不具有尺度不变性
2. Sobel滤波
sobel 算子是一个主要用做边缘检测的离散微分算子,Sobel算子结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。这本次实践中,用sobel滤波器计算梯度。
3.角点响应函数R
定义了角点响应函数R ,通过判定R 大小来判断窗口是否有角点,即 R > threshold 时则有角点(threshold是我们自定义的一个阈值。)
角点应该满足基本性质:窗口最小的特征值尽量的大,此时R =λmin ;当然还有更有效的响应函数,计算公式为:R = det(M)−k(trace(M))2 其中的k是超参数
(一般的,增大k的值,降低角点检测的灵敏度,减少被检测角点的数量;减少k值,增加角点检测的灵敏度,增加被检测角点的数量。)
二、代码实现
1. main函数
main函数主要功能对图像进行读取,并进行灰度图转化,同时调用corner_detect函数,对检测结果进行可视化展示
def main():
# 读取图片
image = cv2.imread("./test1.jpg")
height, width, channel = image.shape
cv2.imshow('image', image)
cv2.waitKey(1000)
cv2.destroyAllWindows()
# 灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 调用corner_detect函数计算角点
dst = corner_detect(gray,block_size=3, nms_size=3, method='harris', k=0.04
)
# 直接用opencv中的角点检测函数 dst = cv2.cornerHarris(gray, blockSize=3, ksize=3,k=0.05)
image_dst = image[:, :, :]
image_dst[dst > 0.01 * dst.max()] = [0, 0, 255]
#可视化结果
cv2.imshow('dst', image_dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
2. corner_detect函数
主要功能对输入灰度图进行角点检测,并返回角点检测的结果corner
# 对输入图像进行Sobel滤波并计算梯度、计算每个像素的H矩阵、计算角点检测响应图R。
def corner_detect(img, block_size, nms_size, method, k):
"""
img:待检测的灰度图
block_size:领域范围
nms_size:非最大值抑制的邻域范围
method:检测角点的方法
k:超参数
"""
H, W = img.shape[:2]
# 1.sobel滤波
pad = block_size // 2 # pad=1
out = np.zeros((H + pad * 2, W + pad * 2), dtype=float)
out[pad:pad + H, pad:pad + W] = img.copy().astype(float)
tmp = out.copy()
out_v = out.copy()
out_h = out.copy()
K_v = [[1, 2, 1], [0, 0, 0], [-1, -2, -1]]
K_h = [[1, 0, -1], [2, 0, -2], [1, 0, -1]]
for y in range(H):
for x in range(W):
out_v[pad + y, pad + x] = sum(K_v * (tmp[y:y + block_size, x:x + block_size]))
out_h[pad + y, pad + x] = sum(K_h * (tmp[y:y + block_size, x:x + block_size]))
out_v = np.clip(out_v, 0, 255)
out_h = np.clip(out_h, 0, 255)
out_v = out_v[pad:pad + H, pad:pad + W].astype(np.uint8)
out_h = out_h[pad:pad + H, pad:pad + W].astype(np.uint8)
# 2.计算梯度
grad = np.zeros((H, W, 2), dtype=float)
grad[:, :, 0] = out_v
grad[:, :, 1] = out_h
# 3.计算H矩阵
H_m = np.zeros((H, W, 3), dtype=float)
H_m[:, :, 0] = grad[:, :, 0] ** 2
H_m[:, :, 1] = grad[:, :, 1] ** 2
H_m[:, :, 2] = grad[:, :, 0] * grad[:, :, 1]
# 取最小特征值作为检测值,记在H_e矩阵
H_e = np.zeros((H, W), dtype=float)
for i in range(H):
for j in range(W):
if H_m[i, j, 0] > H_m[i, j, 1]:
H_e[i, j] = H_m[i, j, 1]
else:
H_e[i, j] = H_m[i, j, 0]
# 4.计算角点检测响应图R
H_m = [np.array([[H_m[i, j, 0], H_m[i, j, 2]], [H_m[i, j, 2], H_m[i, j, 1]]]) for i in range(H) for j in range(W)]
D, T = list(map(np.linalg.det, H_m)), list(map(np.trace, H_m))
R = np.array([abs(d - k * t ** 2) for d, t in zip(D, T)])
# 5.将计算出响应函数的值R进行非极大值抑制,滤除一些不是角点的点,同时要满足大于设定的阈值
R_max = np.max(R)
R = R.reshape(H, W)
H_max = np.max(H_e)
corner = np.zeros_like(R, dtype=uint8)
for i in range(H):
for j in range(W):
if method == 'harris':
# 角点检测器,以及对3x3邻域内非极大值进行抑制
if R[i, j] > R_max * 0.01 and R[i, j] == np.max(
R[max(0, i - 1):min(i + nms_size - 1, H - 1), max(0, j - 1):min(j + nms_size - 1, W - 1)]):
corner[i, j] = 255
else:
# 依据H矩阵最小特征值进行检测
if H_e[i, j] > H_max * 0.01:
corner[i, j] = 255
cv2.imshow('corner', corner)
# cv2.waitKey(0)
return corner
三、结果对比
1.不同检测方法(对比一下使用角点检测器R与H矩阵最小特征值)
图1为角点检测器R,图2为只使用最小特征值,显然使用检测器R的效果不如最小特征值,检测出的角点更多倾向于边缘线条而不是单独的点


2.不同超参数k(使用角点检测器R,改变k值)
图3为k=0.05,图4为k=0.03,可知增大k的值,降低角点检测的灵敏度,减少被检测角点的数量;减少k值,增加角点检测的灵敏度,增加被检测角点的数量。

3.非最大值抑制(对3x3的邻域范围内非最大值抑制)
加入之后能解决角点检测器R的线条问题,对于检测连续的点进行抑制,角点效果更好
(几乎看不出原图的美女有角点)


四、参考资料
-
CSDN博主「果壳乄」的文章《角点特征之Harris角点检测算法》原文链接:
https://blog.csdn.net/my_kun/article/details/106918857 -
CSDN博主「weixin_39745345」的文章《python sobel滤波_Sobel滤波器》原文链接:https://blog.csdn.net/weixin_39745345/article/details/111515227
-
博客园博主wyu123《学习OpenCV中边缘检测的各种算子和滤波器——Canny算子,Sobel算子,Laplace算子以及Scharr滤波器》原文链接:https://www.cnblogs.com/wyuzl/p/6286083.html