Halcon图像分割总结
摘要
在机器视觉项目当中,选定特定的图像区域,再此基础上做进一步处理,需要对图像区域分割,分割的方法有很多种,对于具体项目而言,不同的图像分割方法适用的场景不同,因此需要对特定的场景选择特定的图像分割方法,这里对图像区域分割方法做总结。
全局阈值分割
全局阈值分割:在整幅图像中根据灰度阈值进行分割;
- 适用场景
光照均匀,想要提取的目标区域与背景之间灰度差异较大,且目标区域的灰度值范围集中且稳定。不适用于环境光变化的场景。 - 相关算子
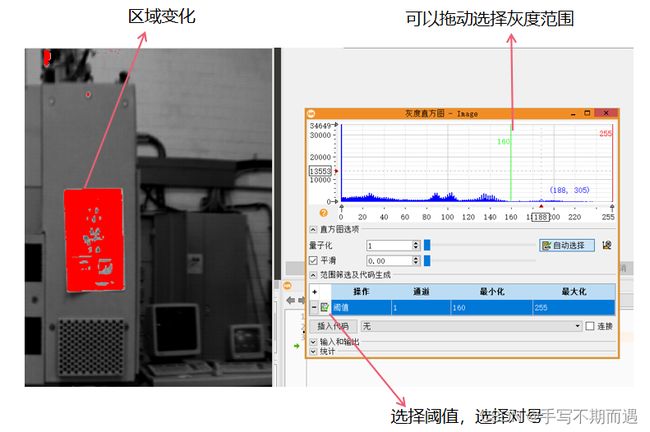
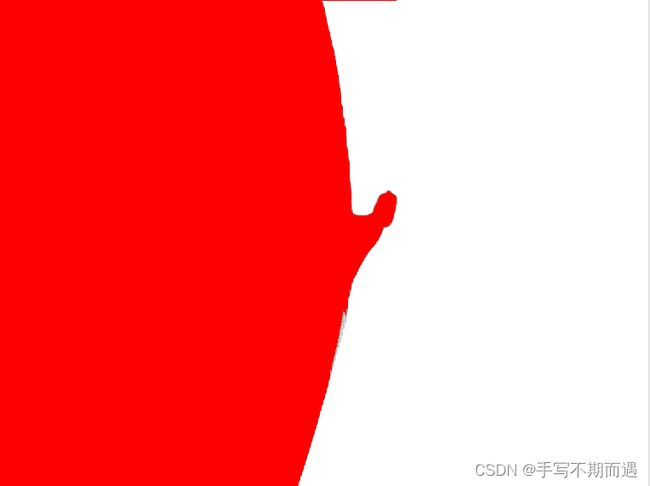
threshold(Image,Region,grayMin,grayMax);
提取灰度值范围在grayMin到grayMax的区域。
可以直接在主程序窗口输入,也可以采用halcon提供的灰度直方图窗口拉拖最大最小值范围,可以实时的看到提取的区域的变化。
选中阈值,可以实时看到选中的区域变化
自动二值阈值分割
适合于直方图存在两个波峰的情况,即图像前景背景的区别较大
- 适用场景:
整幅图像黑白对比明显,所要提取的区域与背景灰度值差异很大,且成像稳定、 - 相关算子
binary_threshold(Image,Region,Method,LightDark,UsedThreshold)
可以根据第四个参数选择是要提取亮的区域还是暗的区域。
其中,第三个参数为’max_separability’时,就是非常有名的大津法,Otsu法。
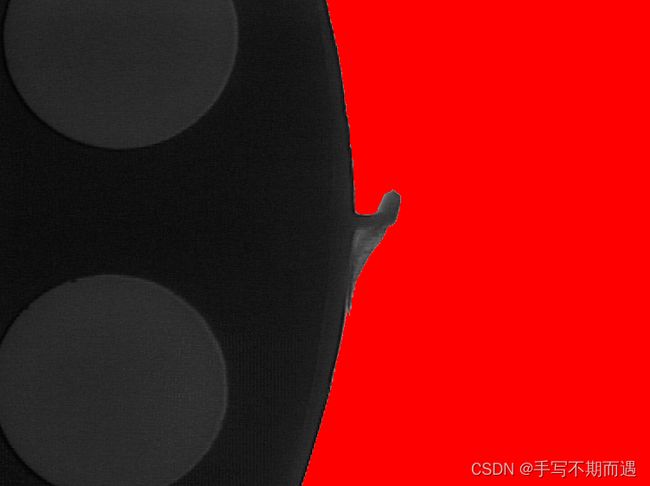
当选择dark时,分割的结果为:
当选择light时,分割的结果为:
动态阈值分割
动态阈值分割的方法有很多种,不同动态阈值分割的方法鲁棒性不同。总的来说,动态阈值分割是为了对光照不均匀,图像灰度值变化较大的场景自动分割的方法。
dyn_threshold
-
适用场景
适用于无法使用单一的阈值分割的情况,如背景比较复杂 -
相关算子
dyn_threshold(OrigImage,thresholdImage,regionDynthresh,Offset,lightdark)
在这个算子里面第二个参数是阈值图像,一般在动态分割之前,需要做一个图像均值平滑处理,使用算子mean_image。了解过图像底层算法的人都知道,mean_image的参数代表掩膜窗口,其数值越大,能平滑掉更多的噪点,但是会影响边缘的对比度,一般参数设置为排除掉噪点即可。
因此这里需要结合图像平滑处理
mean_image (Image, ImageMean, 3, 3)
dyn_threshold (Image, ImageMean, RegionDynThresh, 5, 'dark')
var_threshold
- 适用场景
利用局部均值和标准差分割,适用于光照不均匀的场景同时目标区域与周围区域有较大灰度差。 - 相关算子
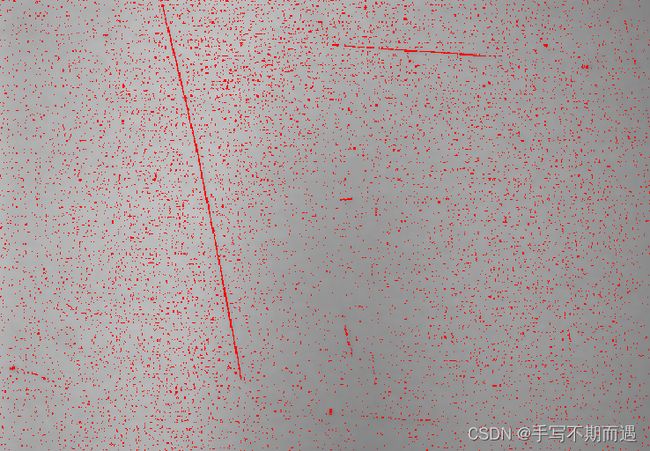
var_threshold (Image, Region, 15, 15, 0.2, 50, 'dark')
图像效果

动态阈值分割的方法有很多,基本效果和以上几个算子效果都差不多,这里就不赘述了…
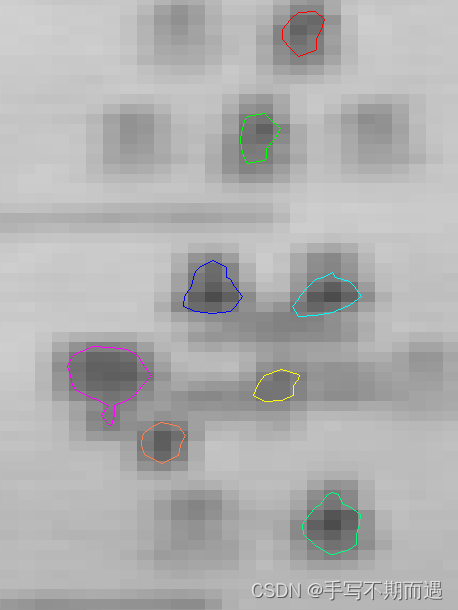
亚像素轮廓分割
亚像素轮廓是halcon的一种数据结构,它不是基于像素的,在像素内部相邻元素之间做边缘拟合,可以具体到像素内部,因此被称为亚像素轮廓。
相关算子
threshold_sub_pix(Image,Region,128)
这里的含义是将小于128阈值的灰度区域分割成区域。
图像效果