Deep Global Registration (CVPR 2020) 论文解析
文章目录
- 0. 相关链接:
- 1. 简介
- 2. 稀疏卷积与特征提取
- 3. Weighted Procrustes与流形学习
- 4. Robust Refinement
0. 相关链接:
- 论文网址:https://node1.chrischoy.org/data/publications/dgr/DGR.pdf
- 论文代码:https://github.com/chrischoy/DeepGlobalRegistration
- 论文视频:https://youtu.be/stzgn6DkozA
1. 简介
\qquad Deep Global Registration (DGR) 是一个基于correspondence的partial-to-partial registration通用框架,和之前我写的Fast Global Registration的框架有类似之处,都是在原有correspondence的基础上,采用outlier filter策略取得可靠的inliers,再在inliers的基础上使用SVD得到鲁棒的transformation. 请注意这种outlier filter的操作不需要重复求取correspondence(与ICP不同)的,而只是每次滤除一部分不可靠的correspondence。与FGR的不同主要有以下两点:
- FGR采用关联验证+BR对偶性进行滤波,而DGR采用流形学习+Weighted Procrustes+Robust Refinement过程进行滤波
- FGR采用FPFH作为特征输入,DGR采用FCGF作为特征输入。FCGF是一种稀疏卷积编码的深度特征,在3DMatch上有较高的召回率。
\qquad 接下来分以下几步介绍DGR:稀疏卷积与特征提取,Weighted Procrustes与流形学习,Robust Refinement过程。整体的理解难度是要低于FGR的。
2. 稀疏卷积与特征提取
\qquad 稀疏卷积的详细介绍见NVIDA发布的两个链接:代码实现、理论解析。采用的库是NVIDA的MinkowskiEgine。这里只简单介绍一下它与不同的卷积有什么不同。
\qquad 稀疏卷积(Sparse Convoluntion)是用于点云的一种卷积。由于点云的坐标是浮点数,因此一般会一步操作将点云的坐标离散化(Quantization),离散化后的点云坐标为整数,符合卷积核的计算规范。
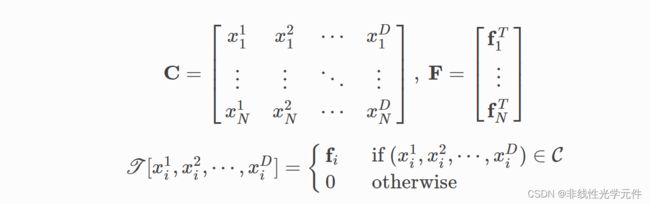
\qquad 稀疏卷积张量(Sparse Tensor)的保存规范是坐标和特征分别保存。因为稀疏张量的坐标不满足Dense的特征。本文就batch=1的情况讨论,C的每行保存一个D维坐标向量,而F的每行保存一个 F D F_D FD维的特征向量(在下图中没展示出来)。C的每一行对应F的一个特征,而C不包含的坐标在F中一律记为0。
\qquad 对于一个3x3的稀疏卷积操作而言,需要知道它周围包含自身的9个邻域(一般需要由搜索器事先确定),然后在使用3x3卷积与它周围邻域的值做乘法即可。稀疏卷积的stride和普通卷积类似。
\qquad DGR的特征提取层使用的是FCGF(Fully Convolutional Geometric Feature),FCGF是稀疏卷积版的ResUNet结构,是一种32维度的端到端点云特征,在3DMatch上有93%-96%的Recall(不同Voxel和Final Feature),它的结构表示如下。
DGR在使用FCGF时的匹配是基于简单的L2范数距离的(这一点与FGR类似),采用KDTree进行加速。
3. Weighted Procrustes与流形学习
\qquad 读过ICP那篇论文的学者应该知道以下问题存在闭解:
arg min R , t ∑ i ∥ y i − R x i + t ∥ 2 \arg\min_{\textbf{R},\, \textbf{t}} \sum_i\Vert y_i-\textbf{R}x_i+\textbf{t} \Vert_2 argR,tmini∑∥yi−Rxi+t∥2
\qquad DGR的作者找到了一篇1991年的论文,它证明了即使加上了权重 w i w_i wi,上述问题也存在闭解,即
arg min R , t ∑ i w i ∥ y i − R x i + t ∥ 2 \arg\min_{\textbf{R},\, \textbf{t}} \sum_i w_i \Vert y_i-\textbf{R}x_i+\textbf{t} \Vert_2 argR,tmini∑wi∥yi−Rxi+t∥2
这个闭解的形式论文和代码中都有,我将代码放在下面作为参考:
def weighted_procrustes(X:torch.Tensor, Y:torch.Tensor, w:torch.Tensor, eps:float):
"""
X: torch tensor N x 3
Y: torch tensor N x 3
w: torch tensor N
"""
# https://ieeexplore.ieee.org/document/88573
assert len(X) == len(Y)
W1 = torch.abs(w).sum()
w_norm = w / (W1 + eps)
mux = (w_norm * X).sum(0, keepdim=True)
muy = (w_norm * Y).sum(0, keepdim=True)
# Use CPU for small arrays
Sxy = (Y - muy).t().mm(w_norm * (X - mux)).cpu().double()
U, D, V = Sxy.svd()
S = torch.eye(3).double()
if U.det() * V.det() < 0:
S[-1, -1] = -1
R = U.mm(S.mm(V.t())).float()
t = (muy.cpu().squeeze() - R.mm(mux.cpu().t()).squeeze()).float()
return R, t
\qquad 得到这个闭解的好处也很明显, w i w_i wi权重可以理解为每一组匹配的置信度,这样就可以针对软匹配进行SVD求解了。而这个置信度 w i w_i wi也稀疏卷积的端到端网络通过流行学习得到的。
\qquad 例如A={0,1,2,3,4,5}, B={5,6,7,8,9,10},假设A和B的一组匹配关系为{(0,5),(1,6),(2,7),(3,9),(4,8),(5,10)}。那么匹配{(0,5),(1,6),(2,7),(5,10)}就分布在2D平面的一个1D流形上,而错误匹配(3,9),(4,8)则不在。将这个结论拓展到三维匹配。例如 A = { ( x 1 1 , x 2 1 , x 3 1 ) , ( x 1 2 , x 2 2 , x 3 2 ) , . . . , ( x 1 n , x 2 n , x 3 n ) } A=\lbrace(x_1^1,x_2^1,x_3^1),(x_1^2,x_2^2,x_3^2),...,(x_1^n,x_2^n,x_3^n) \rbrace A={(x11,x21,x31),(x12,x22,x32),...,(x1n,x2n,x3n)}, B = { ( y 1 1 , y 2 1 , y 3 1 ) , ( y 1 2 , y 2 2 , y 3 2 ) , . . . , ( y 1 n , y 2 n , y 3 n ) } B=\lbrace(y_1^1,y_2^1,y_3^1),(y_1^2,y_2^2,y_3^2),...,(y_1^n,y_2^n,y_3^n) \rbrace B={(y11,y21,y31),(y12,y22,y32),...,(y1n,y2n,y3n)},若将A和B的一组匹配的坐标也像上述一样合并在一起,那么它们应该分布在6D空间的一个3D流形上。因为它们应该满足一个三自由度方程:
y i = R x i + t y_i=\textbf{R}x_i+\textbf{t} yi=Rxi+t
这种流形判据也就是点云配准中常说的inlier prediction.
\qquad 作者仍然采用了稀疏卷积来预测这些匹配是不是分布在流形上,由于分布在流形上的判据通常是由它周围的点确定的,因此这种做法也许是可行的(但作者没有证明了)。
\qquad 可以将流形学习理解为分割模型,最后一维度置为1维表示是否在流形上的概率,则得到了一个6D空间上的流形学习稀疏卷积网络(如下)。
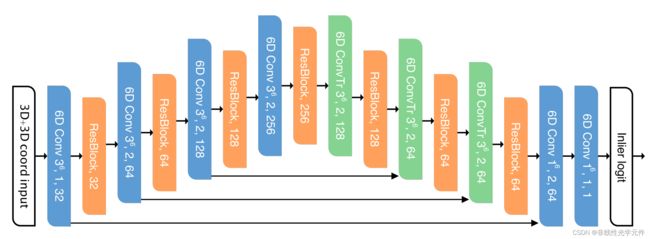 \qquad 这个网络被作者称为SimpleUNet,但实际上和ResUNet的结构非常相似,不同在于卷积编码的维度,还有就是上面FCGF的ResUNet是3D卷积,这个SimpleUNet是6D卷积。
\qquad 这个网络被作者称为SimpleUNet,但实际上和ResUNet的结构非常相似,不同在于卷积编码的维度,还有就是上面FCGF的ResUNet是3D卷积,这个SimpleUNet是6D卷积。
\qquad 续上前节的FCGF特征匹配,DGR的结构就是先提取FCGF特征,利用KDTree搜索L2范数最小完成初步匹配,对初步匹配结果利用SimpleUNet预测inlier prediction,得到每一个匹配的权重 w i w_i wi,最后利用weighted procrustes得到R和t的闭解。
\qquad 代码中还有一个小tips,inlier prediction会输出一个浮点数,这个浮点数会先经过Sigmoid层得到一个0~1的数。作者给出了个阈值 ϵ \epsilon ϵ用于将 < ϵ <\epsilon <ϵ的所有prediction置0。
4. Robust Refinement
\qquad 看到这里是不是觉得DGR已经结束了,已经得到 R \textbf{R} R和 t \textbf{t} t了。然而作者增加了Robust Refinement,然后利用torch自带的优化器进行梯度下降优化(代码中设置最大iteration为1000)。这一步的目的还是为了减小outlier产生的不良影响。
\qquad 设第3节产生的初始旋转矩阵和平移向量为 R 0 , T 0 R_0,T_0 R0,T0,Template点云为 P 1 P_1 P1,source点云为 P 0 P_0 P0。为了优化变量的方便,采用李群的变量形式定义优化变量,即设 R = G ( ξ R ) R=\mathcal{G}(\xi_R) R=G(ξR), ξ T = R − 1 T \xi_T=R^{-1}T ξT=R−1T,则得到了一下问题的优化形式:
arg min ξ R , ξ T ∑ i ϕ ( w ) L ( R p 1 + T − p 0 ) \arg\min_{\xi_R,\xi_T}\sum_i \phi(w)L(Rp_1+T-p_0) argξR,ξTmini∑ϕ(w)L(Rp1+T−p0)
其中 ϕ ( w ) = { w , w > τ 0 , w ≤ τ \phi(w)=\begin{cases} w,&w>\tau \\ 0,&w\leq \tau \end{cases} ϕ(w)={w,0,w>τw≤τ, L ( x ) = { 0.5 x 2 , x < 1 0.5 ( ∣ x ∣ − 0.5 ) . x ≥ 1 L(x)=\begin{cases} 0.5x^2, &x<1\\ 0.5(|x|-0.5).&x\geq 1 \end{cases} L(x)={0.5x2,0.5(∣x∣−0.5).x<1x≥1
其中HuberLoss L ( x ) L(x) L(x)(有时也称为Smooth L1Loss)的图像大致如下:
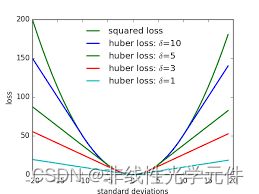
\qquad 上述的1是指1个voxel。由于HuberLoss可微,所以作者设的 R = R 0 , T = T 0 R=R_0,T=T_0 R=R0,T=T0,通过迭代和梯度下降的方法对 R , T R,T R,T进行进一步优化,从而满足HuberLoss最小,这一步其实也是具有启发性,采用梯度优化主要还是为了追求效率,也是一个启发式的idea。相关代码如下
transformation = Transformation(R, t).to(points.device)
optimizer = optim.Adam(transformation.parameters(), lr=1e-1)
scheduler = optim.lr_scheduler.ExponentialLR(optimizer, gamma=0.999)
loss_prev = loss_fn(transformation(points), trans_points).item()
break_counter = 0
# Transform points
for i in range(max_iter):
new_points = transformation(points) # R,t are learnable paramters
loss = loss_fn(new_points, trans_points) # loss is weighted least square function
if loss.item() < 1e-7:
break
optimizer.zero_grad()
loss.backward()
optimizer.step() # optimize R and t
scheduler.step()
if i % stat_freq == 0 and verbose:
print(i, scheduler.get_lr(), loss.item())
if abs(loss_prev - loss.item()) < loss_prev * break_threshold_ratio:
break_counter += 1
if break_counter >= max_break_count:
break
loss_prev = loss.item()
它在3DMatch和KITTI上的效果如下表

实际上,这个结果是在成功样本率中的performance而非全部样本的performance,筛选的标准是<0.6m and <5°,DGR的成功率在KITTI数据集上为98.38%,全局的样本误差为RTE=0.15m,RRE=1.43°,算法平均耗时0.60s(在3080Ti上测试).