Ubuntu18.04 —— 安装环境及运行Vins_mono(2022年)
Ubuntu18.04 —— 安装环境及运行Vins_mono
- 一、环境安装
-
- 1.检查安装版本
-
- openCV
- Eigen
- Pangolin
- 二、ubunt18.04使用国内源安装ros及问题解决
-
- 1.添加国内中科大源
- 2.软件库更新
- 3.安装全功能版本的ROS
-
- 如果出现错误(E: Sub-process /usr/bin/dpkg returned an error code (1))
- 解决办法:
- 最终解决办法:
- 4.初始化空间
-
- 如果报错内容为“sudo: rosdep:找不到命令提示”则运行
- 如果报错内容为
- 5.更新空间
- 6.添加环境变量
- 7.安装完成,运行小乌龟测试以下,新建3个终端,分别运行
- 三、运行Vins_mono
-
- 1.下载编译Vins_mono
- 2.下载数据集
- 2.运行vins_mono
-
- 第一个终端
- 第二个终端
- 第三个终端
- 3.运行结果
- 4.roslaunch命令
一、环境安装
本次运行过程是在以前安装的ORB-SLAM3环境基础之上,详细的安装过程见我的另一篇博客Ubuntu18.04 —— 新系统从头安装ORB-SLAM3过程(2022年)
1.检查安装版本
openCV
![]()
Eigen

Pangolin

二、ubunt18.04使用国内源安装ros及问题解决
1.添加国内中科大源
#添加中科大源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
#添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2.软件库更新
sudo apt-get update
sudo apt-get upgrade
3.安装全功能版本的ROS
## 安装
sudo apt-get install ros-melodic-desktop-full
如果出现错误(E: Sub-process /usr/bin/dpkg returned an error code (1))
正在解包 ros-melodic-desktop-full (1.4.1-0bionic.20220120.165755) ...
在处理时有错误发生:
/tmp/apt-dpkg-install-X1FdpB/346-python-catkin-pkg-modules_0.4.24-1_all.deb
/tmp/apt-dpkg-install-X1FdpB/370-python-rospkg-modules_1.4.0-1_all.deb
/tmp/apt-dpkg-install-X1FdpB/371-python-rosdistro-modules_0.8.3-1_all.deb
E: Sub-process /usr/bin/dpkg returned an error code (1)
解决办法:
可能是依赖项没有安装成功,根据错误提示进行安装:
sudo apt-get install python-catkin-pkg-modules python-rospkg-modules python-rosdistro-modules
结果:
没有安装成功!!!!!
~$ sudo apt-get install python-catkin-pkg-modules python-rospkg-modules python-rosdistro-modules
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
python-catkin-pkg-modules 已经是最新版 (0.4.24-1)。
python-catkin-pkg-modules 已设置为手动安装。
下列软件包是自动安装的并且现在不需要了:
libb64-0d libcpp-common0d librosconsole2d libroscpp-serialization0d
libroscpp1d librostime0d libxmlrpcpp1d python-genmsg python-genpy
python-rosclean python-rosgraph python-rosgraph-msgs python-rosmaster
python-rosparam python-std-msgs rosout
使用'sudo apt autoremove'来卸载它(它们)。
下列【新】软件包将被安装:
python-rosdistro-modules python-rospkg-modules
升级了 0 个软件包,新安装了 2 个软件包,要卸载 0 个软件包,有 316 个软件包未被升级。
有 643 个软件包没有被完全安装或卸载。
需要下载 0 B/55.8 kB 的归档。
解压缩后会消耗 400 kB 的额外空间。
您希望继续执行吗? [Y/n] y
(正在读取数据库 ... 系统当前共安装有 235142 个文件和目录。)
正准备解包 .../python-rospkg-modules_1.4.0-1_all.deb ...
正在解包 python-rospkg-modules (1.4.0-1) ...
dpkg: 处理归档 /var/cache/apt/archives/python-rospkg-modules_1.4.0-1_all.deb (--unpack)时出错:
正试图覆盖 /usr/lib/python2.7/dist-packages/rospkg/__init__.py,它同时被包含于软件包 python-rospkg 1.1.4-1
正准备解包 .../python-rosdistro-modules_0.8.3-1_all.deb ...
正在解包 python-rosdistro-modules (0.8.3-1) ...
dpkg: 处理归档 /var/cache/apt/archives/python-rosdistro-modules_0.8.3-1_all.deb (--unpack)时出错:
正试图覆盖 /usr/lib/python2.7/dist-packages/rosdistro/__init__.py,它同时被包含于软件包 python-rosdistro 0.6.6-1
在处理时有错误发生:
/var/cache/apt/archives/python-rospkg-modules_1.4.0-1_all.deb
/var/cache/apt/archives/python-rosdistro-modules_0.8.3-1_all.deb
E: Sub-process /usr/bin/dpkg returned an error code (1)
重新安装一下ros看看:
~$ sudo apt-get install ros-melodic-desktop-full
[sudo] sfann 的密码:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
ros-melodic-desktop-full 已经是最新版 (1.4.1-0bionic.20220120.165755)。
您也许需要运行“apt --fix-broken install”来修正上面的错误。
下列软件包有未满足的依赖关系:
python-rosdep-modules : 依赖: python-rospkg-modules (>= 1.3.0) 但是它将不会被安装
依赖: python-rosdistro-modules (>= 0.7.5) 但是它将不会被安装
ros-melodic-rqt-gui : 依赖: python-rospkg-modules 但是它将不会被安装
ros-melodic-rqt-robot-monitor : 依赖: python-rospkg-modules 但是它将不会被安装
E: 有未能满足的依赖关系。请尝试不指明软件包的名字来运行“apt --fix-broken install”(也可以指定一个解决办法)。
运行“apt --fix-broken install”依旧不能解决问题!!!!!
最终解决办法:
##在用apt-get安装软件包的时候遇到E: Sub-process /usr/bin/dpkg returned an error code (1)问题,解决方法如下:
cd /var/lib/dpkg/
sudo mv info/ info_bak # 现将info文件夹更名
sudo mkdir info # 再新建一个新的info文件夹
sudo apt-get update # 更新
sudo apt-get -f install # 修复
sudo mv info/* info_bak/ # 执行完上一步操作后会在新的info文件夹下生成一些文件,现将这些文件全部移到info_bak文件夹下
sudo rm -rf info # 把自己新建的info文件夹删掉
sudo mv info_bak info # 把以前的info文件夹重新改回名
成功:

4.初始化空间
sudo rosdep init
![]()
这时候可能会报错,如果没有报错,直接执行5
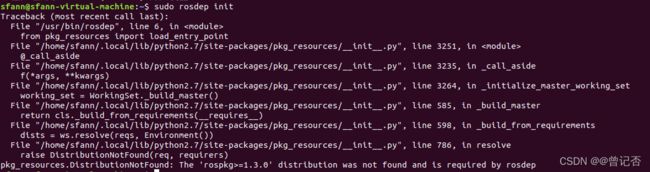
如果报错内容为“sudo: rosdep:找不到命令提示”则运行
sudo apt-get install python-rosdep python-wstool ros-melodic-ros
(根据自己实际的ROS版本确定中间的名字)
然后重新运行第4步。
如果报错内容为
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.

可以参考
https://blog.csdn.net/qq_17685565/article/details/105741864
结果:
5.更新空间
rosdep update
6.添加环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
![]()
7.安装完成,运行小乌龟测试以下,新建3个终端,分别运行
roscore #打开主进程
rosrun turtlesim turtlesim_node #运行turtlesim 包中的turtlesim_node节点,打开小乌龟控制台
rosrun turtlesim turtle_teleop_key # 运行turtlesim 包中的turtle_teleop_key节点,可以使用键盘方向键移动小乌龟
如果可以运行乌龟了,说明ros安装成功了
如果运行roscore,显示没有这个命令,可以从新运行第3步试试。

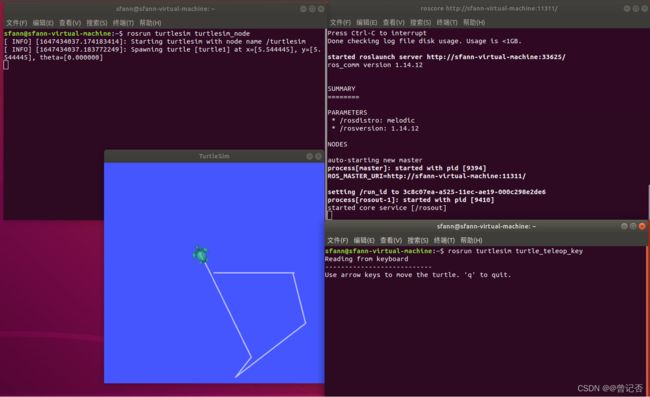
安装成功:

三、运行Vins_mono
1.下载编译Vins_mono
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
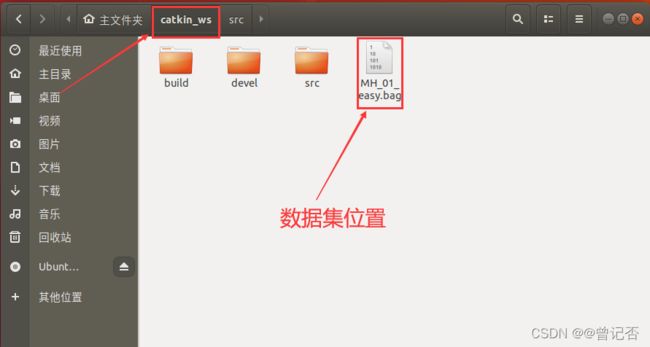
2.下载数据集
测试包文件下载路径:EuRoC MAV Dataset
以MH_01为例:
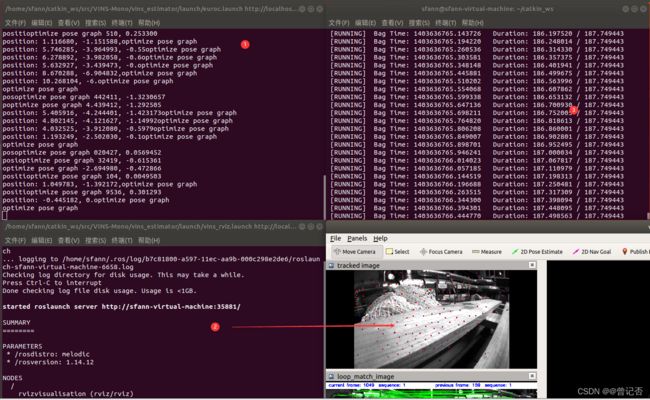
2.运行vins_mono
在catkin_ws文件夹下打开三个终端,分别启动vins_estimator,rviz和播放bag文件。以MH_01为例
注意:
- 在catkin_ws
文件夹下打开三个终端 - 不要忘记设置环境变量:
source devel/setup.bash
第一个终端
source devel/setup.bash
roslaunch vins_estimator euroc.launch
第二个终端
source devel/setup.bash
roslaunch vins_estimator vins_rviz.launch
第三个终端
source devel/setup.bash
//rosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag
// 记得换成自己的下载路径
//本次博客路径为:
rosbag play MH_01_easy.bag
3.运行结果
4.roslaunch命令
我们知道,rosrun命令用于运行一个ROS节点,这个在简单程序中使用比较方便。但是在规模比较大的程序中,常常有几个或者几十个节点,这些节点之间彼此互有联系,协同达到软件正确执行的目的。这时候再使用rosrun命令的话,就会比较麻烦。此时,roslaunch命令闪亮登场了,它可以运行多个节点。并且roslaunch命令在运行节点时,还可以附加一些ROS命令选项,比如修改参数或节点的名称,设置节点的命名空间,设置ROS_ROOT及ROS_PACKAGE_PATH,以及环境变量修改等选项的ROS命令。
roslaunch命令的使用,需要先创建一个XML格式的xxx.launch文件,将要运行的节点以及系统中相关参数设置信息写在这个launch文件中,然后执行这个launch文件就可以了。【这里可以理解为launch文件就是一个脚本文件,要执行的操作都写在脚本文件中,执行脚本文件就OK了。】
roslaunch命令执行格式:
roslaunch 功能包名称 launch文件 [参数设置]
这里roslaunch命令会在对应的功能包中找到名称匹配的launch文件,并执行这个launch文件。如果设置了参数的话,会将参数传入到launch文件中赋给对应的参数。
例如,执行vins_estimator功能包中的euroc.launch文件,命令如下。
roslaunch vins_estimator euroc.launch
如果在launch文件所在路径下执行该launch文件的话,就不需要加功能包名称了,因为此时是能直接找到launch文件的。
如果运行launch文件时需要设置参数,如下所示。arg为参数名称,value为给参数的赋值。
roslaunch my_file.launch arg:=value
注意:在执行roslaunch命令时,一定要先执行source命令:source …/devel/setup.bash命令,否则找不到对应的包名称。