04轨迹规划基础----正逆运动学的C++代码编写
1.摘要
文章的主要内容是,编写C++代码,实现六轴机械臂的正运动学运算(输入为关节角度,输出为T6 )和逆运动学求解(输入为T6,输出为关节角度),这个代码是很基础的,可能十几年前网上就有成熟的了,当然你也可以用我下边粘贴的代码。
本文数学公式截图来自论文
[1]张付祥,赵阳.UR5机器人运动学及奇异性分析[J].河北科技大学学报,2019,40(01):51-59.
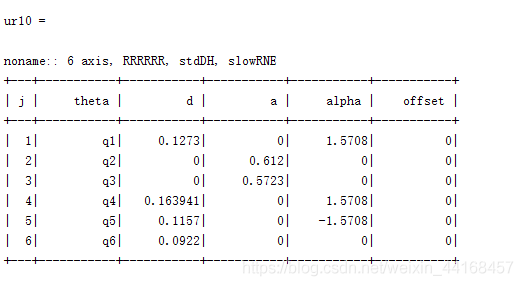
2.DH参数表
DH参数表基于ur10机器人
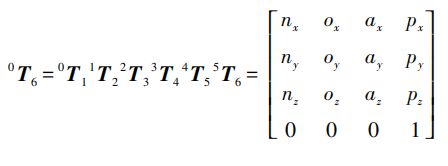
3.正运动学
①数学公式
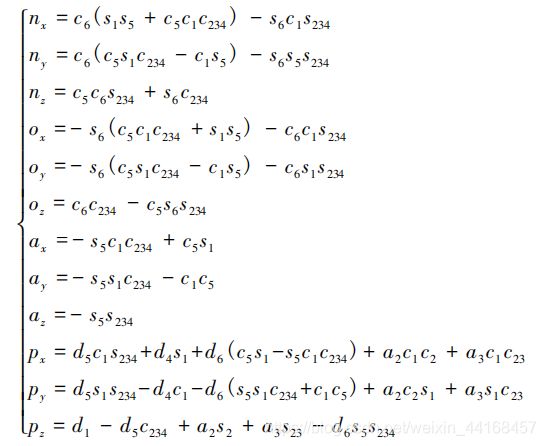
②
#include运行结果:
关节角度q: [0.1 0.2 0.3 0.4 0.5 0.6 ]
矩阵T:
0.0473957 -0.976785 -0.208915 1.18382
-0.392918 0.174058 -0.90295 -0.127305
0.918351 0.124882 -0.375547 0.416715
0 0 0 1
4.逆运动学
这个我应该码出来的,但是我家好冷,我的手已经僵了,我现在感觉我敲机械键盘像是敲缝纫机,所以我明天会将这个文章更新(PS:我写的逆运动学代码,肯定会比matlab自带的好用哦!)
好久没更新的,我今天上号我发现我多了几个粉丝!啊我好激动,我的动力来了!!!!
以下为逆运动学计算代码
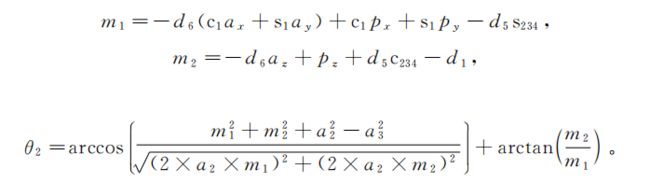
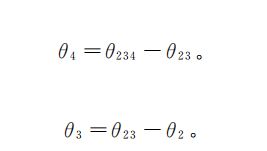
①数学公式
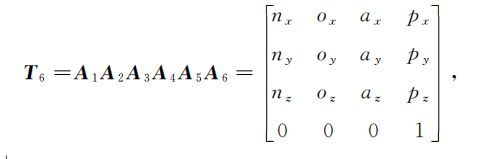

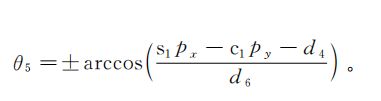
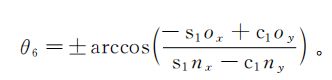
接下求第2、3、4关节的时候有点复杂了,你可要看好了


#include结果:
输出初始的关节角度q: [1 0.2 0.3 0.4 0.5 0.8 ]
输出由q 进行正运动学结果T:
0.182807 -0.795703 0.577442 0.835595
-0.333502 -0.602703 -0.724931 0.848183
0.924856 -0.0600552 -0.375547 0.416715
0 0 0 1
输出由T输入 进行逆运动学得到的结果qq: [1 0.2 0.3 0.4 0.5 0.8 ]
5预告
下一篇应该在明天或者后天:关于插值的c++代码/c++中姿态的图像表述
(先后顺序还没想好)
这篇文写了两天,所以中间有很多碎碎叨叨的话,我就不删了哦,代码运行有问题可以私戳我
我写的好认真,然后我发现有粉丝好开心,所以我就过分的设置成仅粉丝可见了,原谅我的虚荣,我的指针用的还不太熟,所以代码不够高级,请见谅~