关于ScanNet 数据集下载问题
1.介绍
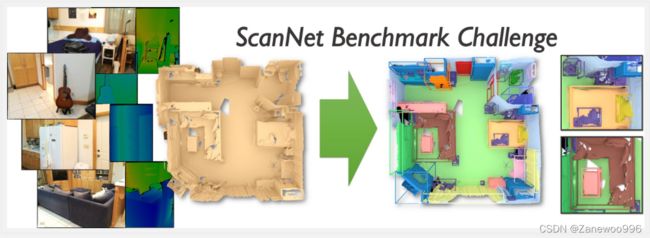
ScanNet数据集
ScanNet is an RGB-D video dataset containing 2.5 million views in more than 1500 scans, annotated with 3D camera poses, surface reconstructions, and instance-level semantic segmentations.
ScanNet | Richly-annotated 3D Reconstructions of Indoor Scenes
官方GitHub
https://github.com/scannet/scannet#
2.申请获取数据集
下载并填写协议书 http://kaldir.vc.in.tum.de/scannet/ScanNet_TOS.pdf
http://kaldir.vc.in.tum.de/scannet/ScanNet_TOS.pdf
申请数据集:
将填好的pdf发送到官方邮箱,等待回复。
ScanNet Terms of Use to [email protected]
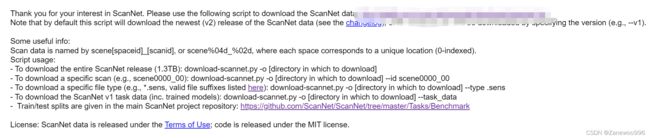
依据内容下载。
3.下载的问题。
更改代码中的问题。如改为python 3 支持的 urllib.request
import urllib.request
# import urllib同样是版本问题。改为python3支持的 input()
raw.input()还有一个最重要的问题:
直接访问 所给的base_url 出现:

执行下载命令出现:
urllib.error.HTTPError: HTTP Error 404: Not Found
解决办法:
1.找到图中给的地址:

2.在浏览器中打开
将下图中网页链接复制到浏览器,直接用浏览器或迅雷下载。本人测试的是迅雷可以下载。
更新:
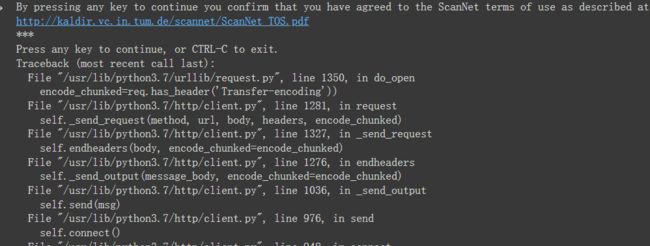
目前最新测试,没有下载链接出现就直接报错。
现在想到的解决办法:
BASE_URL = 'http://kaldir.vc.in.tum.de/scannet/'
TOS_URL = BASE_URL + 'ScanNet_TOS.pdf'
PREPROCESSED_FRAMES_FILE = ['scannet_frames_25k.zip', '5.6GB']
TEST_FRAMES_FILE = ['scannet_frames_test.zip', '610MB']
LABEL_MAP_FILES = ['scannetv2-labels.combined.tsv', 'scannet-labels.combined.tsv']
RELEASES = ['v2/scans', 'v1/scans']
RELEASES_TASKS = ['v2/tasks', 'v1/tasks']
# download preprocessed scannet_frames_25k.zip file
download_file(os.path.join(BASE_URL, RELEASE_TASKS, PREPROCESSED_FRAMES_FILE[0]), os.path.join(out_dir_tasks, PREPROCESSED_FRAMES_FILE[0]))之前下载scannet_frames_25k.zip file 的链接为:就直接是上面几个字段拼接来的
需要别的 应该可以去看一下代码,根据代码代码内容修改。
4.指定下载某些场景:
parser = argparse.ArgumentParser(description='Downloads ScanNet public data release.')
parser.add_argument('-o', '--out_dir', required=True, help='directory in which to download')
parser.add_argument('--task_data', action='store_true', help='download task data (v1)')
parser.add_argument('--label_map', action='store_true', help='download label map file')
parser.add_argument('--v1', action='store_true', help='download ScanNet v1 instead of v2')
parser.add_argument('--id', help='specific scan id to download')
parser.add_argument('--preprocessed_frames', action='store_true', help='download preprocessed subset of ScanNet frames (' + PREPROCESSED_FRAMES_FILE[1] + ')')
parser.add_argument('--test_frames_2d', action='store_true', help='download 2D test frames (' + TEST_FRAMES_FILE[1] + '; also included with whole dataset download)')
parser.add_argument('--data_efficient', action='store_true', help='download data efficient task files; also included with whole dataset download)')
parser.add_argument('--tf_semantic', action='store_true', help='download google tensorflow records for 3D segmentation / detection')
parser.add_argument('--type', help='specific file type to download (.aggregation.json, .sens, .txt, _vh_clean.ply, _vh_clean_2.0.010000.segs.json, _vh_clean_2.ply, _vh_clean.segs.json, _vh_clean.aggregation.json, _vh_clean_2.labels.ply, _2d-instance.zip, _2d-instance-filt.zip, _2d-label.zip, _2d-label-filt.zip)')
args = parser.parse_args()可根据parser 设定参数
示例:
1.由于全部文件很大(共1.2T,一般大家硬盘都不一定够。)下载预处理的数据集(每100帧 取一张):
python data_download.py -o {save_dir} --preprocessed_frames其对应的test :
--test_frames_2d
用于学习测试 可。
2.指定某一个场景进行下载:
来源官方的相关介绍:
The data in ScanNet is organized by RGB-D sequence. Each sequence is stored under a directory with named
scene, or_ scene%04d_%02d, where each space corresponds to a unique location (0-indexed). The raw data captured during scanning, camera poses and surface mesh reconstructions, and annotation metadata are all stored together for the given sequence. The directory has the following structure:|-- .sens RGB-D sensor stream containing color frames, depth frames, camera poses and other data |-- _vh_clean.ply High quality reconstructed mesh |-- _vh_clean_2.ply Cleaned and decimated mesh for semantic annotations |-- _vh_clean_2.0.010000.segs.json Over-segmentation of annotation mesh |-- .aggregation.json, _vh_clean.aggregation.json Aggregated instance-level semantic annotations on lo-res, hi-res meshes, respectively |-- _vh_clean_2.0.010000.segs.json, _vh_clean.segs.json Over-segmentation of lo-res, hi-res meshes, respectively (referenced by aggregated semantic annotations) |-- _vh_clean_2.labels.ply Visualization of aggregated semantic segmentation; colored by nyu40 labels (see img/legend; ply property 'label' denotes the nyu40 label id) |-- _2d-label.zip Raw 2d projections of aggregated annotation labels as 16-bit pngs with ScanNet label ids |-- _2d-instance.zip Raw 2d projections of aggregated annotation instances as 8-bit pngs |-- _2d-label-filt.zip Filtered 2d projections of aggregated annotation labels as 16-bit pngs with ScanNet label ids |-- _2d-instance-filt.zip Filtered 2d projections of aggregated annotation instances as 8-bit pngs
python data_download.py --out_dir={} --id scene0050_00 --type .sensps:具体下载时方法可利用3.下载的问题。中所提
感谢:深度学习(1)RGB-D数据集:ScanNet_冰火舞动的博客-CSDN博客_rgbd数据集