【人脸识别检测戴口罩实战】初识OpenCV简单操作之图像处理【第二课】

初识OpenCV简单操作之图像处理,获取人脸特征,给图像简单的打码,绘制图形、运算、几何变换、平滑处理、边缘检测
文章目录
- 一、获取图像的感兴趣区域
-
- (1)通过像素矩阵直接得到ROI区域
- (2)对图像ROI域进行赋值
- 获取脸部信息
- 获取其他特征
- 图像域赋值
- 二、绘制图形
-
- 画直线cv2.line()
- 画圆 cv2.circle()
- 画矩形 cv2 rectal.gle()
- 画椭圆 cv2.ellipse()
- 添加文字 cv2.putText()
- 三、图像运算
-
- 图像加法运算
-
- ‘+’
- cv2.add(img 1,img2)
- cV2.addWeighted(img1,a1pha,img2,beta,gamma)
- 图像减法运算
-
- ‘-’
- cv2.subtract(img 1,img2)
- 图像乘法运算
- 图像除法运算
- 图像按位与操作
- 图像按位或操作
- 图像按位取反操作
- 图像按位异或操作
- 四、图像几何变换
-
- (1)图像缩放
- 函数:dst = cv2.resize( src, dsize[, fx, fy, interpolation])
- (2)图像翻转
- 函数: dst = cV2.flip( src, flipCode )
- 五、图像平滑
-
- cv2. GaussianBlur (img, ksize, sigmaX)
- 六、图像边缘检测
-
- cv2. Canny (img, thresholdl, threshold2)
一、获取图像的感兴趣区域
(1)通过像素矩阵直接得到ROI区域
img[140:260,210:340]
(2)对图像ROI域进行赋值
img[180:300,270:400] = face1
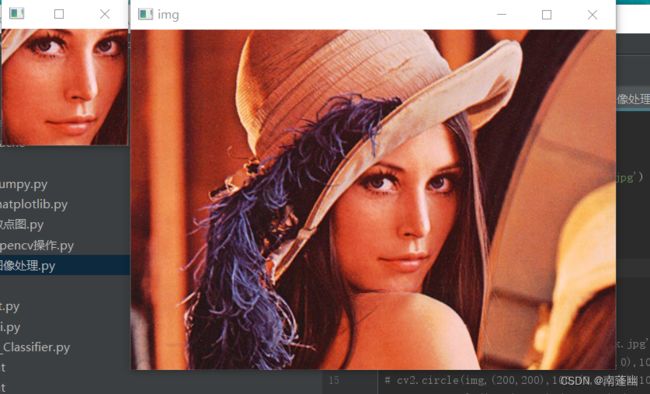
获取脸部信息
import cv2
img = cv2.imread('D:\opencvdata\lena.jpg')
face = img[140:260,210:340]
cv2.imshow('img',img)
cv2.imshow('face',face)
cv2.waitKey(0)
cv2.destroyAllWindows()
获取其他特征
由此我们也可以推出,获取鼻子,眼睛,嘴巴等特征
140:260为高
210:340为宽
import cv2
img = cv2.imread('D:\opencvdata\lena.jpg')
face = img[140:260,210:340]
eye = img[140:180,210:340]
mouth = img[220:260,210:340]
nose = img[180:220,210:340]
# img[140:260,210:340] = 0
cv2.imshow('img',img)
cv2.imshow('face',face)
cv2.imshow('eye',eye)
cv2.imshow('nose',nose)
cv2.imshow('mouth',mouth)
cv2.waitKey(0)
cv2.destroyAllWindows()

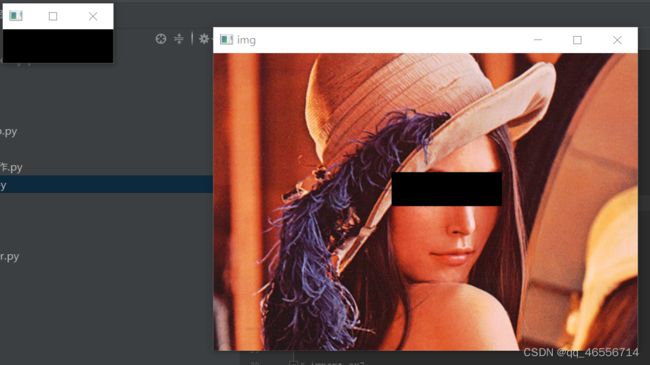
图像域赋值
import cv2
img = cv2.imread('D:\opencvdata\lena.jpg')
face = img[140:260,210:340]
img[140:260,210:340] = 0
img[140:260,210:340] = 255
cv2.imshow('img',img)
cv2.imshow('face',face)
cv2.waitKey(0)
cv2.destroyAllWindows()
赋值为0,为黑色

赋值为255,为白色
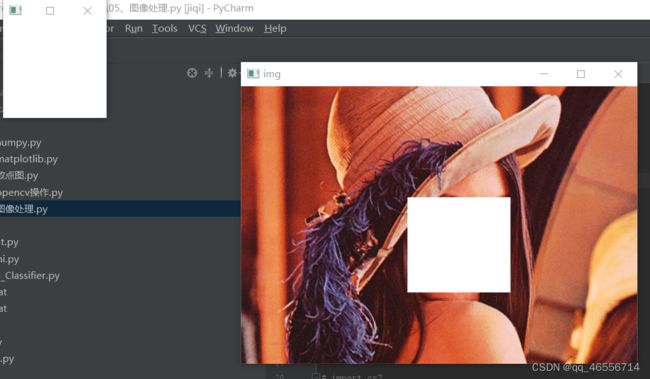
对其他特征赋值,简单的打码
二、绘制图形
画直线cv2.line()
import cv2
img = cv2.imread(r'D:\opencvdata\b.jpg')
cv2.line(img,(0,0),(400,300),(0,255,0),10)
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()

(0,0) 开始点
(400,300) 结束点
(0,255,0) 颜色
10 粗细
画圆 cv2.circle()
cv2.circle(img,(200,200),100,(0,0,255),10)
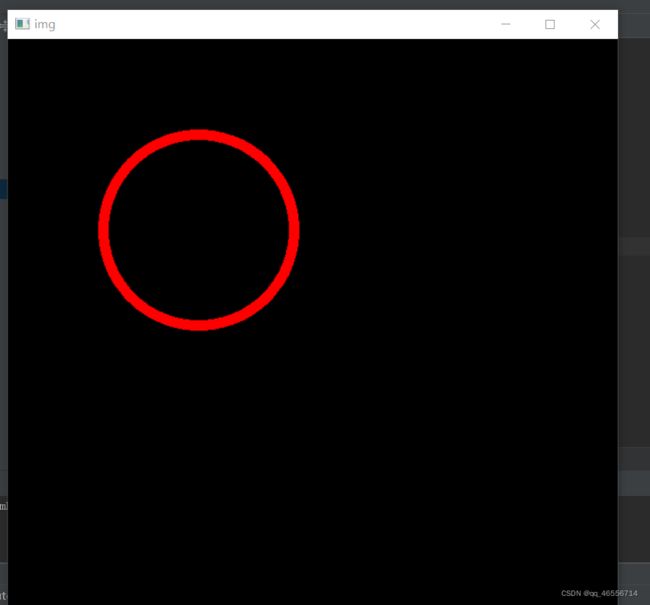
(200,200) 圆心
100 半径
(0,0,255) 颜色
10 粗细
画矩形 cv2 rectal.gle()
cv2.rectangle(img,(10,10),(200,200),(100,100,100),5)

(10,10) 左上角
(200,200) 右下角
(100,100,100) 颜色
5 粗细
画椭圆 cv2.ellipse()
cv2.ellipse(img,(300,300),(100,50),0,0,360,(0,120,80),3)
(300,300) 中心
(100,50) 长轴
0 角度
0 开始角度
360 结束角度
(0,120,80) 颜色
3 粗细
添加文字 cv2.putText()
cv2.putText(img,"opencv",(300,400),cv2.FONT_HERSHEY_COMPLEX,2.0,(0,0,255),3)

“opencv”,显示文本
(300,400) 显示位置
cv2.FONT_HERSHEY_COMPLEX,字体类型
2.0,字体大小
(0,0,255),字体颜色
3 粗细
三、图像运算
图像运算就是对图像的每个像素进行处理,图像的运算包括算术运算和逻辑运算,也称为按位运算。
图像的算数运算是指对多幅图你进行加、减、乘、除运算。
图像的逻辑运算是指对多幅图像进行与、或、非、异或运算。
注意:
两个图像在进行运算时,图像的像素大小和类型要完全一致,否则opencv就会报错。
图像加法运算
‘+’
import cv2
img1 = cv2.imread(r'D:\opencvdata\g.jpg')
img2 = cv2.imread(r'D:\opencvdata\t.jpg')
img3 = img2 + img1
cv2.imshow('img',img3)
cv2.waitKey(0)
cv2.destroyAllWindows()
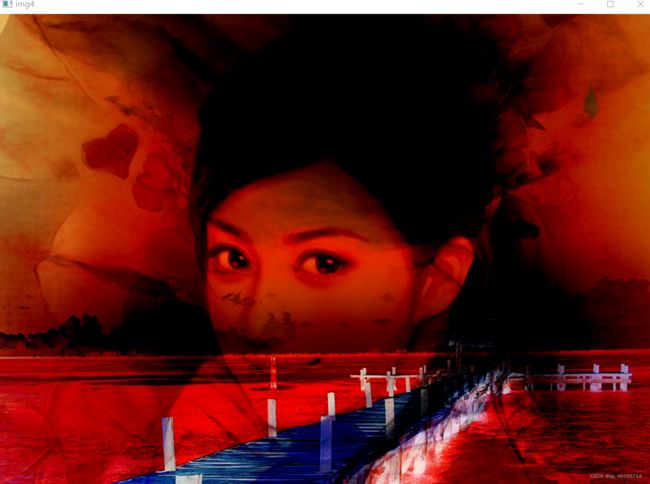
cv2.add(img 1,img2)
大于255,对255取模;
img4 = cv2.add(img1,img2)

cV2.addWeighted(img1,a1pha,img2,beta,gamma)
大于255,以255计数
img5 = cv2.addWeighted(img1,0.3,img2,0.7,0)
0.3和0.7分别为两个图像所占权重
图像减法运算
‘-’
小于0,对255取模;
img3 = img2 - img1
cv2.subtract(img 1,img2)
img4 = cv2.subtract(img1,img2)
小于0使用0计数
图像乘法运算
‘*’
img3 = img2 * img1
cv2.multiply(img1,img2)
img4 = cv2.multiply(img1,img2)

图像除法运算
/
img3 = img2 / img1
cv2.divide(img 1,img2)
img4 = cv2.divide(img1,img2)

图像按位与操作
cv2.bitwise_and(img1,img2[,mask])
img4 = cv2.bitwise_and(img1,img2)
图像按位或操作
cv2.bitwise_or(img1,img2[,mask])
img5 = cv2.bitwise_or(img1,img2)
图像按位取反操作
cv2.bitwise_not(img 1[,mask])
img6 = cv2.bitwise_not(img1)
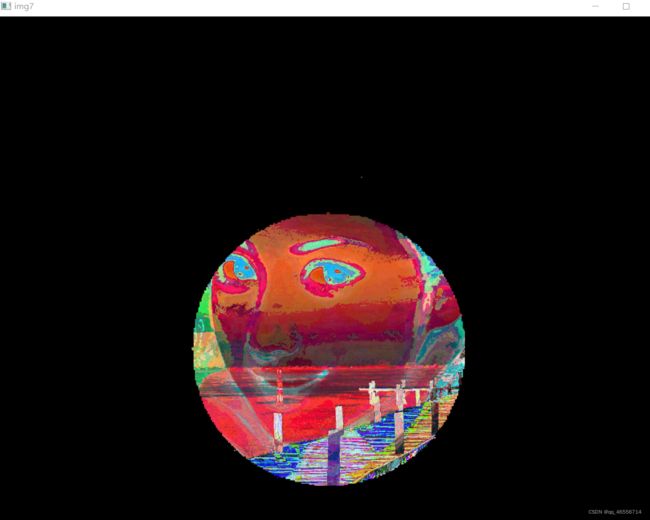
图像按位异或操作
cv2.bitwise_xor(img 1,img2[,mask])
img7 = cv2.bitwise_xor(img1,img2)
更加清晰的看到效果
mask = cv2.imread('D:\opencvdata\m.png',0)
w,h,_ = img1.shape
mask = cv2.resize(mask,(w,h))
img7 = cv2.bitwise_xor(img1,img2,mask=mask)
det = cv2.bitwise_xor(img7,img2)
四、图像几何变换
(1)图像缩放
函数:dst = cv2.resize( src, dsize[, fx, fy, interpolation])
参数: src表示源图像;
dsize表示目标图像大小;
fx表示水平轴上的比例因子;
fy表示垂直轴上的比例因子;
interpolation插值方法,共有5种。
interpolation 5种插值方法:
- INTER_NEAREST-近邻插值法;
- INTER_LINEAR-双线性插值法(默认);
- INTER_AREA -区域插值法,基于局部像素的重采样;
- INTER_CUBIC-三次样条插值,基于4x4像素邻域的3次插值法;
- INTER_LANCZOS4 -基于8x8像素邻域的Lanczos插值
在使用cv2.resize ()对原始图像进行缩放,
当缩小图像时,使用区域插值方式(INTER_AREA)能够得到最好的效果;
当放大图像时,使用三次样条插值(INTER_CUBIC)方式和双线性插值(INTER_LINEAR)方式都能够取得较好的效果。
三次样条插值方式速度较慢,双线性插值方式速度相对较快且效果并不差。
dst = cv2.resize(img,(1000,500),cv2.INTER_AREA)
dst = cv2.resize(img,None,fx=0.2,fy=0.3)
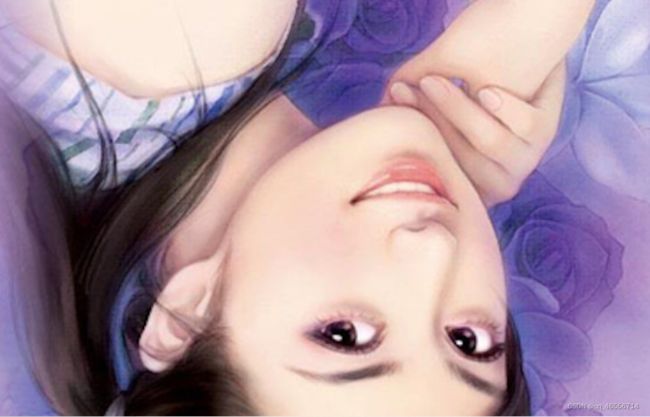
(2)图像翻转
函数: dst = cV2.flip( src, flipCode )
参数: src表示源图像;
flipCode表示翻转方式;
0绕x轴翻转;
1绕y轴翻转;
-1绕x,y轴同时翻转。
import cv2
img = cv2.imread('D:\opencvdata\g.jpg')
dst1 = cv2.flip(img,1)
dst2 = cv2.flip(img,0)
dst3 = cv2.flip(img,-1)
cv2.imshow('img',img)
cv2.imshow('dst1',dst1)
cv2.imshow('dst2',dst2)
cv2.imshow('dst3',dst3)
cv2.waitKey(0)
cv2.destroyAllWindows()


五、图像平滑
在保留图像原有信息的基础上,过滤并去除掉图像中的噪声,这一过程就是图像的平滑处理,所得图像被称为平滑图像。
平滑处理的基本原理是:将噪声点的像素值处理为其周围临近像素点像素值的临近值。取近似值的方法很多,主要有如下的几种方法:均值滤波、方框滤波、高斯滤波、中值滤波、双边滤波、2D卷积。
cv2. GaussianBlur (img, ksize, sigmaX)
参数:img输入原图;
ksize 高斯内核大小
sigmaX X方向上的高斯核标准偏差
import cv2
img = cv2.imread(r'D:\opencvdata\noise.png')
img2 = cv2.GaussianBlur(img,(7,7),0)
cv2.imshow('img',img)
cv2.imshow('img2',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
六、图像边缘检测
边缘是指图像中图像像素值变化明显的位置。这些变化明显的位置常常是图像中需要关注的位置,对这些关键位置的检测,就叫做边缘检测。
如果将图像的每一行像素和每一列像素都描述成一个关于灰度值的函数,那么图像的边缘对应在灰度值函数中是函数值突然变大的区域。函数值的变化趋势可以用函数的导数描述。因此可以通过寻找导数值较大的区域去寻找函数中突然变化的区域,进而确定图像中的边缘位置。
通常我们可以把边缘检测分为以下三个类型:
(1)通过计算图像的梯度值来检测图像的边缘,如Sobel算子、Prewitt算子、Roberts算子及差分过缘检测
(2)通过寻求二阶导数中的过零点来检测边缘,如拉普拉斯算子、高普拉普拉斯算子、Canny算子边缘检测。
(3)混合一阶与二阶微分为基础的边缘检测,综合利用一阶微分与二阶微分特征,如Marr-Hildreth边缘检测算子。
cv2. Canny (img, thresholdl, threshold2)
参数: img输入原图
threshold1 國值1
threshold2 國值2
import cv2
img = cv2.imread(r'D:\opencvdata\g.jpg')
img2 = cv2.Canny(img,50,200)
cv2.imshow('img',img)
cv2.imshow('img2',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
类似素描了!