DPCM编码算法的实现与分析
目录
DPCM编解码原理
DPCM编码系统的设计
量化误差PSNR
DPCM
main.cpp
实验结果
实验总结
DPCM编解码原理
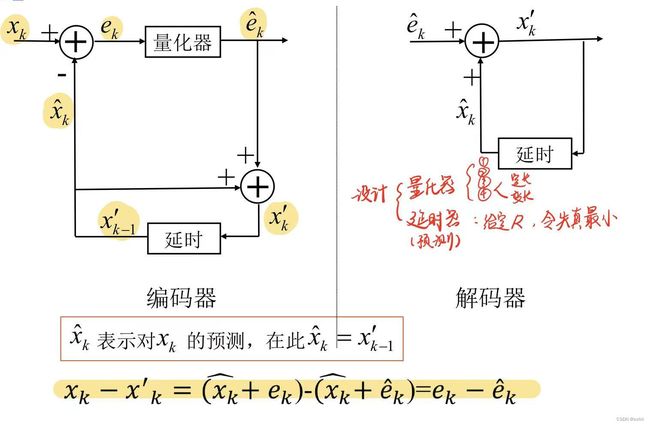
DPCM是差分预测编码调制的缩写,是比较典型的预测编码系统。在DPCM系统中,需要注意的是预测器的输入是已经解码以后的样本。之所以不用原始样本来做预测,是因为在解码端无法得到原始样本,只能得到存在误差的样本。因此,在DPCM编码器中实际内嵌了一个解码器,如编码器中虚线框中所示。在一个DPCM系统中,有两个因素需要设计:预测器和量化器。理想情况下,预测器和量化器应进行联合优化。实际中,采用一种次优的设计方法:分别进行线性预测器和量化器的优化设计。
DPCM编码系统的设计
在本次实验中,我们采用固定预测器和均匀量化器。预测器采用左侧、上方预测均可。
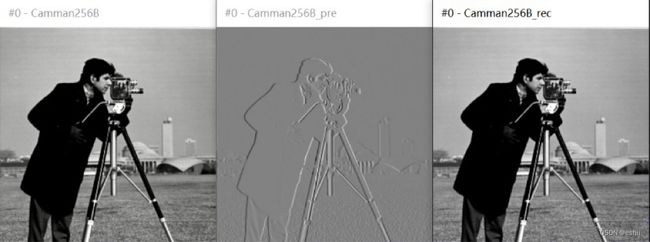
量化器采用8比特均匀量化。本实验的目标是验证DPCM编码的编码效率。首先读取一个256级的灰度图像,采用自己设定的预测方法计算预测误差,并对预测误差进行8比特均匀量化(基本要求)。还可对预测误差进行1比特、2比特和4比特的量化设计(提高要求)。在DPCM编码器实现的过程中可同时输出预测误差图像和重建图像。将预测误差图像写入文件并将该文件输入Huffman编码器,得到输出码流、给出概率分布图并计算压缩比。将原始图像文件输入Huffman编码器,得到输出码流、给出概率分布图并计算压缩比。最后比较两种系统(1.DPCM+熵编码和2.仅进行熵编码)之间的编码效率(压缩比和图像质量)。压缩质量以PSNR进行计算。
量化误差PSNR
计算量化误差时需要计算其均方误差MSE。若图像大小为M×N,I与K分别为原图像和重建图像,则其均方误差计算公式为:

对于图像数据的量化,实验使用峰值信噪比PSNR进行描述。对像素Y分量最大值为255的灰度图像来说,其峰值信噪比(单位为dB)的计算公式如下:
![]()
PSNR值越大,代表效果越理想。
//计算压缩质量
void PSNR(unsigned char* ori_yBuf, unsigned char* rec_yBuf, int width, int height) {
double psnr = 0, MSE = 0;
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++) {
MSE += (ori_yBuf[i * width + j] - rec_yBuf[i * width + j]) * (ori_yBuf[i * width + j] - rec_yBuf[i * width + j]);
}
}
MSE = MSE / (height * width);
double MAX = 255;
psnr = 10 * log10((MAX * MAX) / MSE);
cout << "psnr=" << psnr << endl;
}DPCM
//预测+量化
void DPCM(unsigned char* ori_yBuf, unsigned char* pre_yBuf, unsigned char* rec_yBuf, int width, int height, int bitdepth)
{
double num = pow(2, (int)(9 - bitdepth));
for (int i = 0; i < height; i++) //每一行
{
for (int j = 0; j < width; j++) //第一列
{
if (j == 0) //使用左侧预测的方法,第一列的像素没有参考值
{
//假设预测值为128
//计算预测误差,对预测误差进行量化
pre_yBuf[i * width] = (unsigned char)(((ori_yBuf[i * width] - 128) + 255) / num);
//计算重建值,重建值=反量化后的误差+预测值
rec_yBuf[i * width] = (unsigned char)((pre_yBuf[i * width] - 255 / num) * num + 128);
}
else
{ //选取前一像素的重建值作为预测值
//计算预测误差,对预测误差进行量化
pre_yBuf[i * width + j] = (unsigned char)(((ori_yBuf[i * width + j] - rec_yBuf[i * width + j - 1]) + 255) / num);
//计算重建值,重建值=反量化后的误差+预测值
rec_yBuf[i * width + j] = (unsigned char)((pre_yBuf[i * width + j] - 255 / num) * num + rec_yBuf[i * width + j - 1]);
}
//防止溢出
pre_yBuf[i * width + j] = (unsigned char)(pre_yBuf[i * width + j] * num / 2);
if (rec_yBuf[i * width + j] > 255)
rec_yBuf[i * width + j] = 255;
if (rec_yBuf[i * width + j] < 0)
rec_yBuf[i * width + j] = 0;
}
}
}main.cpp
int main(int argc, char* argv[])
{
char* ori_yuvfilename = NULL;
char* pre_yuvfilename = NULL;
char* rec_yuvfilename = NULL;
FILE* ori_y_file = NULL;
FILE* pre_y_file = NULL;
FILE* rec_y_file = NULL;
int width, height, bitdepth;
ori_yuvfilename = argv[1];
pre_yuvfilename = argv[2];
rec_yuvfilename = argv[3];
width = atoi(argv[4]);
height = atoi(argv[5]);
bitdepth = atoi(argv[6]);
unsigned char* u_buffer = NULL;
unsigned char* v_buffer = NULL;
unsigned char* y_buffer = NULL; //原始图像
unsigned char* rec_y_buffer = NULL; //重建图像
unsigned char* pre_y_buffer = NULL; //预测误差
errno_t err;
if ((err = fopen_s(&ori_y_file, ori_yuvfilename, "rb")) != 0) {
cout << "FAIL TO OPEN YUV FILE!";
exit(1);
}
if ((err = fopen_s(&pre_y_file, pre_yuvfilename, "wb")) != 0) {
cout << "FAIL TO OPEN PRE_YUV FILE!";
exit(1);
}
if ((err = fopen_s(&rec_y_file, rec_yuvfilename, "wb")) != 0) {
cout << "FAIL TO OPEN REC_YUV FILE!";
exit(1);
}
//开辟空间
y_buffer = (unsigned char*)malloc(width * height);
u_buffer = (unsigned char*)malloc(width * height / 4);
v_buffer = (unsigned char*)malloc(width * height / 4);
pre_y_buffer = (unsigned char*)malloc(width * height);
rec_y_buffer = (unsigned char*)malloc(width * height);
if (y_buffer == NULL || u_buffer == NULL || v_buffer == NULL || pre_y_buffer == NULL || rec_y_buffer == NULL) {
cout << "no enought memory\n";
exit(1);
}
//读取原始图像数据
fread(y_buffer, 1, width * height, ori_y_file);
fread(u_buffer, 1, width * height / 4, ori_y_file);
fread(v_buffer, 1, width * height / 4, ori_y_file);
//得到原始图像的灰度值分布
FILE* orig;
if ((err = fopen_s(&orig, "ori.txt", "wb")) != 0) {
cout << "FAIL TO OPEN TXT FILE!";
exit(1);
}
double frequency[256] = { 0 };
GetFrequency(y_buffer, frequency, height, width);
for (int i = 0; i < 256; i++)
{
fprintf(orig, "%d\t%f\n", i, frequency[i]);
}
DPCM(y_buffer, pre_y_buffer, rec_y_buffer, width, height, bitdepth);
PSNR(y_buffer, rec_y_buffer, width, height);
FILE* pre;
if ((err = fopen_s(&pre, "pre.txt", "wb")) != 0) {
cout << "FAIL TO OPEN TXT FILE!";
exit(1);
}
double frequency_pre[256] = { 0 };
GetFrequency(pre_y_buffer, frequency_pre, height, width);
for (int i = 0; i < 256; i++)
{
fprintf(pre, "%d\t%f\n", i, frequency_pre[i]);
}
//写入重建图像
fwrite(rec_y_buffer, width * height, 1, rec_y_file);
fwrite(u_buffer, width * height / 4, 1, rec_y_file);
fwrite(v_buffer, width * height / 4, 1, rec_y_file);
//写入预测图像
fwrite(pre_y_buffer, width * height, 1, pre_y_file);
fwrite(u_buffer, width * height / 4, 1, pre_y_file);
fwrite(v_buffer, width * height / 4, 1, pre_y_file);
free(y_buffer);
free(u_buffer);
free(v_buffer);
free(pre_y_buffer);
free(rec_y_buffer);
fclose(ori_y_file);
fclose(pre_y_file);
fclose(rec_y_file);
return 0;
}实验结果
PSNR约为26.0563
实验总结
PSNR ≥ 40dB时,图像质量非常好,接近于原图像;
30dB ≤ PSNR < 40dB时,图像有可察觉的失真,但质量仍可接受;
20dB ≤ PSNR < 30dB时,图像质量较差;
PSNR < 20dB时,图像质量已经无法接受。