基于卷积神经网络(cnn)的手写数字识别(PyTorch)
目录
1.1 卷积神经网络简介
1.2 神经网络
1.2.1 神经元模型
1.2.2 神经网络模型
1.3 卷积神经网络
1.3.1卷积的概念
1.3.2 卷积的计算过程
1.3.3 感受野
1.3.4 步长
1.3.5 输出特征尺寸计算
1.3.6 全零填充
1.3.7 标准化
1.3.7 池化层
1.4 卷积神经网络的全过程
1.5 PyTorch的卷积神经网络(cnn)手写数字识别
1.5.1 代码
1.1 卷积神经网络简介
卷积神经网络(Convolutional Neural Networks,简称:CNN)是深度学习当中一个非常重要的神经网络结构。它主要用于用在图像图片处理,视频处理,音频处理以及自然语言处理等等。
早在上世纪80年代左右,卷积神经网络的概念就已经被提出来了。但其真正的崛起却是在21世纪之后,21世纪之后,随着深度学习理论的不断完善,同时,由计算机硬件性能的提升,计算机算力的不断发展,给卷积神经网络这种算法提供了应用的空间。著名的AlphaGo,手机上的人脸识别,大多数都是采用卷积神经网络。因此可以说,卷积神经网络在如今的深度学习领域,有着举足轻重的作用。
在了解卷积神经网络之前,我们务必要知道:什么是神经网络(Neural Networks),关于这个,我们已经在深度学习简介的 第二部分有所介绍。这里就不赘述了。在了解了神经网络的基础上,我们再来探究:卷积神经网络又是什么呢?当中的“卷积”这个词,又意味着什么呢?
1.2 神经网络
1.2.1 神经元模型
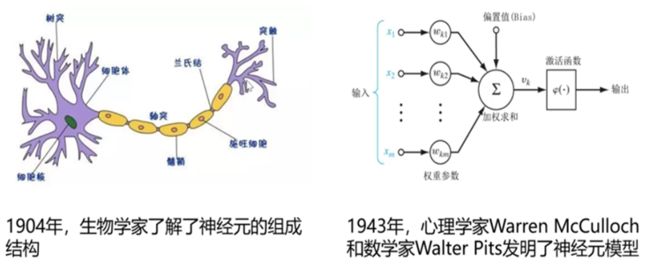
人工神神经网络(neural networks)方面的研究很早就已出现,今天“神经网络” 已是一个相当大的、多学科交叉的学科领域.各相关学科对神经网络的定义多种多样。简单单元组成的广泛并行互连的网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应” 。
神经网络中最基本的成分是神经元(neuron)模型,即上述定义中的“简单单元”,在生物神经网络中,每个神经元与其他神经元相连,当它“兴奋”时,就会向相连的神经元发送化学物质,从而改变这些神经元内的电位;如果某神经元的电位超过了一个“阈值”(threshold),那么它就会被激活,即“兴奋”起来,向其他神经元发送化学物质。在这个模型中,神经元接收到来自n个其他神经元传递过来的输入信号,这些输入信号通过带权重的连接(connection)进行传递,神经元接收到的总输入值将与神经元的间值进行比较,然后通过激活函数处理,产生神经元输出。
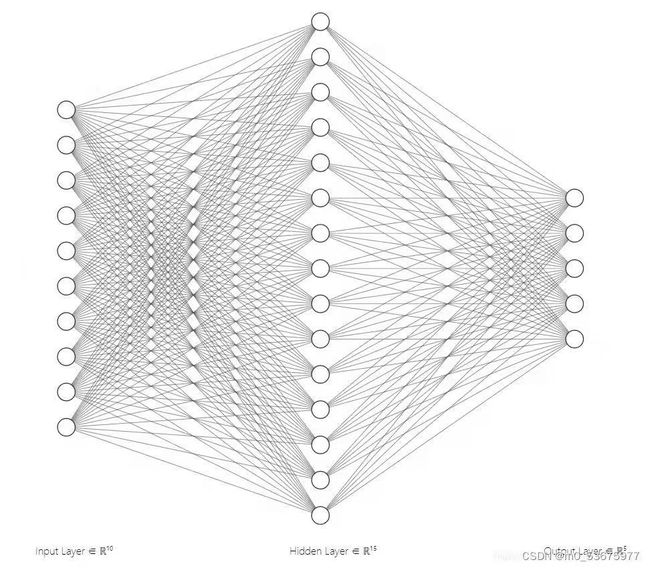
1.2.2 神经网络模型
神经网络是一种运算模型,由大量的节点(或称神经元)之间相互联接构成。每个节点代表一种特定的输出函数,称为激励函数(activation function)。每两个节点间的连接都代表一个对于通过该连接信号的加权值,称之为权重,这相当于人工神经网络的记忆。网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。而网络自身通常都是对自然界某种算法或者函数的逼近,也可能是对一种逻辑策略的表达。
1.3 卷积神经网络
1.3.1卷积的概念
卷积神经网络与普通神经网络的区别在于,卷积神经网络包含了一个由卷积层和子采样层(池化层)构成的特征抽取器。在卷积神经网络的卷积层中,一个神经元只与部分邻层神经元连接。在CNN的一个卷积层中,通常包含若干个特征图(featureMap),每个特征图由一些矩形排列的的神经元组成,同一特征图的神经元共享权值,这里共享的权值就是卷积核。卷积核一般以随机小数矩阵的形式初始化,在网络的训练过程中卷积核将学习得到合理的权值。共享权值(卷积核)带来的直接好处是减少网络各层之间的连接,同时又降低了过拟合的风险。子采样也叫做池化(pooling),通常有均值子采样(mean pooling)和最大值子采样(max pooling)两种形式。子采样可以看作一种特殊的卷积过程。卷积和子采样大大简化了模型复杂度,减少了模型的参数。
1.3.2 卷积的计算过程
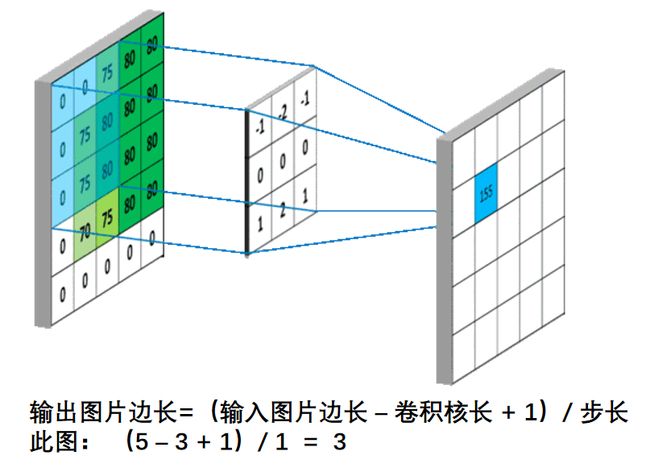
假设我们输入的是5*5*1的图像,中间的那个3*3*1是我们定义的一个卷积核(简单来说可以看做一个矩阵形式运算器),通过原始输入图像和卷积核做运算可以得到绿色部分的结果,怎么样的运算呢?实际很简单就是我们看左图中深色部分,处于中间的数字是图像的像素,处于右下角的数字是我们卷积核的数字,只要对应相乘再相加就可以得到结果。例如图中‘3*0+1*1+2*2+2*2+0*2+0*0+2*0+0*1+0*2=9’
计算过程如下动图:
图中最左边的三个输入矩阵就是我们的相当于输入d=3时有三个通道图,每个通道图都有一个属于自己通道的卷积核,我们可以看到输出(output)的只有两个特征图意味着我们设置的输出d=2,有几个输出通道就有几层卷积核(比如图中就有FilterW0和FilterW1),这意味着我们的卷积核数量就是输入d的个数乘以输出d的个数(图中就是2*3=6个),其中每一层通道图的计算与上文中提到的一层计算相同,再把每一个通道输出的输出再加起来就是绿色的输出数字。
1.3.3 感受野
感受野(Receptive Field):卷积神经网络各输出层每个像素点在原始图像上的映射区域大小。
下图为感受野示意图:
当我们采用尺寸不同的卷积核时,最大的区别就是感受野的大小不同,所以经常会采用多层小卷积核来替换一层大卷积核,在保持感受野相同的情况下减少参数量和计算量。
例如十分常见的用2层3 * 3卷积核来替换1层5 * 5卷积核的方法,如下图所示。

1.3.4 步长
每次卷积核移动的大小。
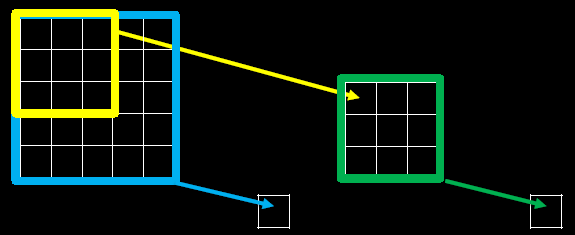
1.3.5 输出特征尺寸计算
输出特征尺寸计算:在了解神经网络中卷积计算的整个过程后,就可以对输出特征图的尺寸进行计算。如下图所示,5×5的图像经过3×3大小的卷积核做卷积计算后输出特征尺寸为3×3
1.3.6 全零填充
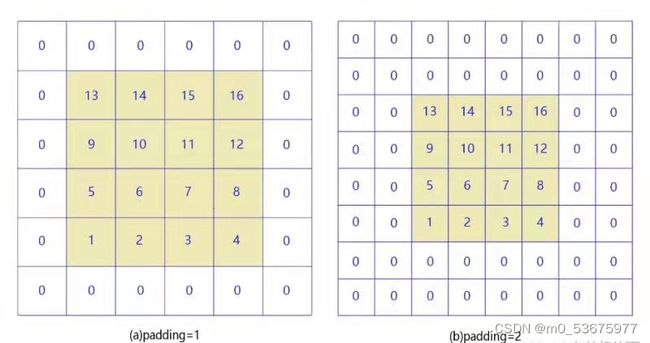
当卷积核尺寸大于 1 时,输出特征图的尺寸会小于输入图片尺寸。如果经过多次卷积,输出图片尺寸会不断减小。为了避免卷积之后图片尺寸变小,通常会在图片的外围进行填充(padding),如下图所示
全零填充(padding):为了保持输出图像尺寸与输入图像一致,经常会在输入图像周围进行全零填充,如下所示,在5×5的输入图像周围填0,则输出特征尺寸同为5×5。

当padding=1和paadding=2时,如下图所示:
1.3.7 标准化
使数据符合0均值,1为标准差的分布。
批标准化(Batch Normalization):对一小批数据(batch),做标准化处理。
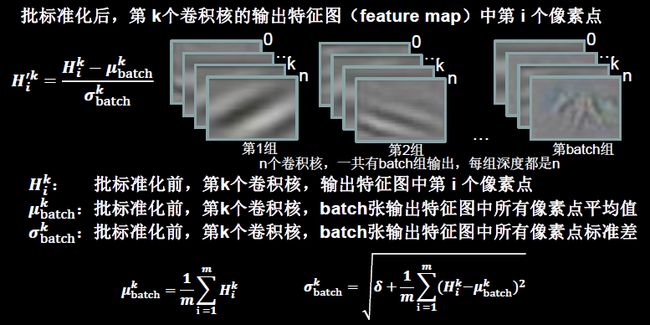
Batch Normalization将神经网络每层的输入都调整到均值为0,方差为1的标准正态分布,其目的是解决神经网络中梯度消失的问题.

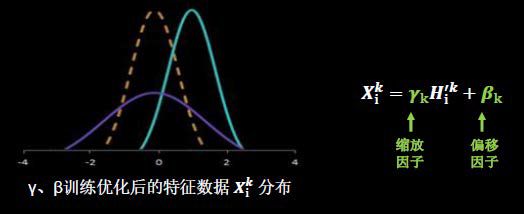
BN操作的另一个重要步骤是缩放和偏移,值得注意的是,缩放因子γ以及偏移因子β都是可训练参数。
1.3.7 池化层
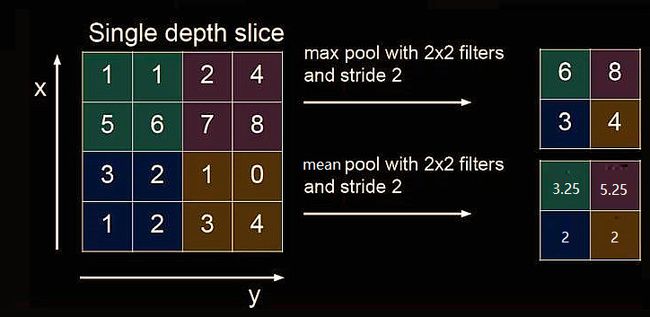
池化(Pooling)用于减少特征数据量。
最大值池化可提取图片纹理,均值池化可保留背景特征
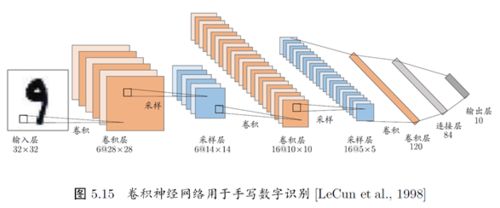
1.4 卷积神经网络的全过程
1.5 PyTorch的卷积神经网络(cnn)手写数字识别
使用的框架为pytorch。
数据集:MNIST数据集,60000张训练图像,每张图像size为28*28。
可在http://yann.lecun.com/exdb/mnist/中获取
1.5.1 代码
import torch
import torch.nn as nn
import torchvision.datasets as dataset
import torchvision.transforms as transforms
import torch.utils.data as data_utils
#获取数据集
train_data=dataset.MNIST(root="D",
train=True,
transform=transforms.ToTensor(),
download=True
)
test_data=dataset.MNIST(root="D",
train=False,
transform=transforms.ToTensor(),
download=False
)
train_loader=data_utils.DataLoader(dataset=train_data, batch_size=100, shuffle=True)
test_loader=data_utils.DataLoader(dataset=test_data, batch_size=100, shuffle=True)
#创建网络
class Net(torch.nn.Module):
def __init__(self):
super().__init__()
self.conv=nn.Conv2d(1, 32, kernel_size=5, padding=2)
self.bat2d=nn.BatchNorm2d(32)
self.relu=nn.ReLU()
self.pool=nn.MaxPool2d(2)
self.linear=nn.Linear(14 * 14 * 32, 70)
self.tanh=nn.Tanh()
self.linear1=nn.Linear(70,30)
self.linear2=nn.Linear(30, 10)
def forward(self,x):
y=self.conv(x)
y=self.bat2d(y)
y=self.relu(y)
y=self.pool(y)
y=y.view(y.size()[0],-1)
y=self.linear(y)
y=self.tanh(y)
y=self.linear1(y)
y=self.tanh(y)
y=self.linear2(y)
return y
cnn=Net()
cnn=cnn.cuda()
#损失函数
los=torch.nn.CrossEntropyLoss()
#优化函数
optime=torch.optim.Adam(cnn.parameters(), lr=0.01)
#训练模型
for epo in range(10):
for i, (images,lab) in enumerate(train_loader):
images=images.cuda()
lab=lab.cuda()
out = cnn(images)
loss=los(out,lab)
optime.zero_grad()
loss.backward()
optime.step()
print("epo:{},i:{},loss:{}".format(epo+1,i,loss))
#测试模型
loss_test=0
accuracy=0
with torch.no_grad():
for j, (images_test,lab_test) in enumerate(test_loader):
images_test = images_test.cuda()
lab_test=lab_test.cuda()
out1 = cnn(images_test)
loss_test+=los(out1,lab_test)
loss_test=loss_test/(len(test_data)//100)
_,p=out1.max(1)
accuracy += (p==lab_test).sum().item()
accuracy=accuracy/len(test_data)
print("loss_test:{},accuracy:{}".format(loss_test,accuracy))