MATLAB数值计算学习笔记(二)误差理论和非线性方程求解
目录
- 一.误差理论
-
- 误差来源
- 误差基本概念
-
- 绝对误差
- 相对误差
- 有效数字
- 误差传播
- 应注意的问题
- MATLAB数值计算精度
-
- 数据显示格式
- 运算精度
- 举例
- 二. 非线性方程(组)求解
-
- 二分法
- 试位法
- 简单迭代法
- 牛顿法
- 牛顿下山法
- 割线法
- 实例
一.误差理论
误差来源
1.模型误差
2.观测误差
3.截断误差:求解模型所用数值方法为近似方法因此有误差存在。
4.舍入误差
误差基本概念
绝对误差
给定一实数 x ∗ x^* x∗,其近似值为 x x x,则称 e = x ∗ − x e=x^*-x e=x∗−x为近似值 x x x的绝对误差,若存在一个正实数\varepsilon,使得 ∣ e ∣ = ∣ x ∗ − x ∣ ≤ ε |e|=|x^*-x|\le\varepsilon ∣e∣=∣x∗−x∣≤ε则称其为近似值的绝对误差限.
相对误差
相对误差公式: e r = x ∗ − x x ∗ e_r=\frac{x^*-x}{x^*} er=x∗x∗−x
实用相对误差公式: e r ˉ = x ∗ − x x \bar{e_r}=\frac{x^*-x}{x} erˉ=xx∗−x
有效数字
误差传播
函数运算中误差的传播可以用函数的泰勒展开式进行估计:
f ( x ∗ ) − f ( x ) = f ′ ( x ) ( x ∗ − x ) + 1 2 f ′ ′ ( ξ ) ( x ∗ − x ) 2 f(x^*)-f(x)=f'(x)(x^*-x)+\frac{1}{2}f''(\xi){(x^*-x)}^2 f(x∗)−f(x)=f′(x)(x∗−x)+21f′′(ξ)(x∗−x)2
∣ f ( x ∗ ) − f ( x ) ∣ ≤ ∣ f ′ ( x ) ∣ e ( x ) + 1 2 ∣ f ′ ′ ( ξ ) ∣ ( e ( x ) ) 2 |f(x^*)-f(x)|\le|f'(x)|e(x)+\frac{1}{2}|f''(\xi)|{(e(x))}^2 ∣f(x∗)−f(x)∣≤∣f′(x)∣e(x)+21∣f′′(ξ)∣(e(x))2
忽略 e ( x ) e(x) e(x)的高阶项,其误差限为:
ε ( f ( x ) ) ≈ ∣ f ′ ( x ) ∣ e ( x ) \varepsilon(f(x))\approx|f'(x)|e(x) ε(f(x))≈∣f′(x)∣e(x)
其解的相对误差是:
ε r ˉ ( f ( x ) ) ≈ ∣ f ′ ( x ) ∣ e ( x ) f ( x ) \bar{\varepsilon_r}(f(x))\approx|f\prime(x)|\frac{e(x)}{f(x)} εrˉ(f(x))≈∣f′(x)∣f(x)e(x)
相对误差限为:
ε r ( f ( x ) ) = ∣ f ′ ( x ) ∣ e ( x ) f ( x ) \varepsilon_r(f(x))=|f\prime(x)|\frac{e(x)}{f(x)} εr(f(x))=∣f′(x)∣f(x)e(x)
应注意的问题
为了减小舍入误差的影响:
1.避免两个详尽的数相减
2.避免绝对值过小的数作除数
3.避免大数吃掉小数
4先化简再计算
5.采用数值稳定性好的算法
MATLAB数值计算精度
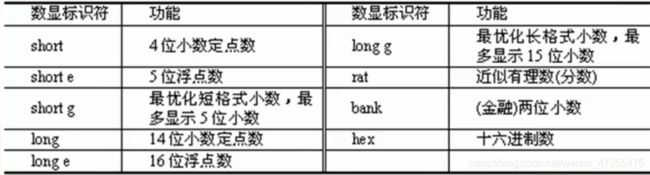
数据显示格式
控制数据输出格式的指令是format
format 数显标识符
运算精度
MATLAB提供了三种运算精度的算法:
数值算法:每个数值都取16位有效数字,运算速度最快。
符号算法:每个数据均为符号,精确但是慢,占用内存多。
可控精度算法:利用控制精度指令digits(n)使运算以n位有效数字进行,亦可用vpa()函数
举例
秦九韶算法
function y=QJS(fun,x)
fun=sym(fun);
a=sym2poly(fun);
s(1)=a(1);
for k=2:length(a)
s(k)=s(k-1)*x+a(k);
end
y=s(end);
二. 非线性方程(组)求解
二分法

优点:简单,对f(x)要求不高,连续即可
缺点:无法求复根和偶重根,收敛慢
function [x,fx,iter,X] =bisect(fun,a,b,eps,varargin)
%二分法
%二分法求非线性方程的根
%输入参数:
%——fun:待求根方程的函数
%——a,b:初始区间的端点
%——eps:精度要求,默认值为1e-6
%——p1,p2,...:求根函数附加参数
%输出参数:
%——x:非线性方程组的近似根
%——fx:根x处的函数值
%——iter:迭代次数
%——X:每一步迭代的结果
if nargin<3
error('输入参数至少需要3个!');
end
if nargin<4
isepmty(eps);eps=1e-6;
end
fa=feval(fun,a,varargin{:});
fb=feval(fun,b,varargin{:});
k=1;
if fa*fb>0
warning(['区间[',num2str(a),',',num2str(b),']可能没有根'])
elseif fa==0
x=a;fx=fa;
elseif fb==0
x=b;fx=fb;
else
while abs(b-a)>eps
x=(a+b)/2;
fx=feval(fun,a,varargin{:});
if fa*fx>0
a=x;
fa=fx;
elseif fb*fx>0
b=x;
fb=fx;
else
break
end
X(k)=x;k=k+1;
end
end
iter=k;
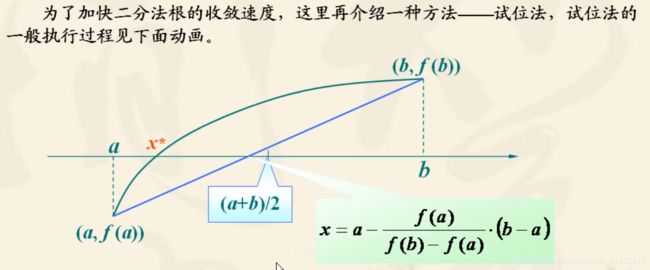
试位法
function [x,fx,iter,X] =test_bit(fun,a,b,eps,varargin)
%试位法求非线性方程的根
%输入参数:
%——fun:待求根方程的函数
%——a,b:初始区间的端点
%——eps:精度要求,默认值为1e-6
%——p1,p2,...:求根函数附加参数
%输出参数:
%——x:非线性方程组的近似根
%——fx:根x处的函数值
%——iter:迭代次数
%——X:每一步迭代的结果
if nargin<3
error('输入参数至少需要3个!');
end
if nargin<4
isepmty(eps);
eps=1e-6;
end
fa=feval(fun,a,varargin{:});
fb=feval(fun,b,varargin{:});
k=1;
if fa*fb>0
warning(['区间[',num2str(a),',',num2str(b),']可能没有根'])
elseif fa==0
x=a;fx=fa;
elseif fb==0
x=b;fx=fb;
else
while abs(b-a)>eps%控制试位法结束条件
x=b-(b-a)/(fa-fb)*fb;
fx=feval(fun,x,varargin{:});%计算x处的函数值
if fa*fx>0%条件
a=x;%端点更新
fa=fx;%端点函数值更新
elseif fb*fx>0%条件
b=x;%端点更新
fb=fx;%端点函数值更新
else
break
end
X(k)=x;k=k+1;
end
end
iter=k;
简单迭代法

function [x,iter,X] = fixpt(g,x0,eps,maxiter)
%简单迭代法求非线性方程的根
%输入参数:
%——g:迭代函数
%——x0:初始迭代点
%——eps:精度要求,默认值为1e-6
%——maxiter:最大迭代次数,默认1e4
%输出参数:
%——x:非线性方程组的近似根
%——iter:迭代次数
%——X:每一步迭代的结果
if nargin<2
error('输入参数至少需要3个');
end
if nargin<3
isempty(eps);
eps=1e-6;
end
if nargin<4
isempty(maxiter);
maxiter=1e4;
end
err=1;k=0;
while err>eps
k=k+1;
x1=feval(g,x0);
err=abs(x1-x0);
x0=x1;
X(k)=x1;
end
if k==maxiter
error('迭代次数超限')
end
x=x1;iter=k;X=X';
end
收敛才可以迭代出结果

牛顿法

function [x,iter,X] = newton(fun,x0,eps,maxiter)
%牛顿法求非线性方程的根
%输入参数:
%——fun:迭代函数
%——x0:初始迭代点
%——eps:精度要求,默认值为1e-6
%——maxiter:最大迭代次数,默认1e4
%输出参数:
%——x:非线性方程组的近似根
%——iter:迭代次数
%——X:每一步迭代的结果
if nargin<2
error('输入参数至少需要3个');
end
if nargin<3
isempty(eps);
eps=1e-6;
end
if nargin<4
isempty(maxiter);
maxiter=1e4;
end
err=1;k=0;
while err>eps
k=k+1;
[fx0,dfx0]=feval(fun,x0);
if dfx0==0
error('f(x)在x0处的导数为0,停止计算')
end
x1=x0-fx0/dfx0;
err=abs(x1-x0);
x0=x1;
X(k)=x1;
end
if k>=maxiter
error('迭代次数超限')
end
x=x1;iter=k;X=X';
end
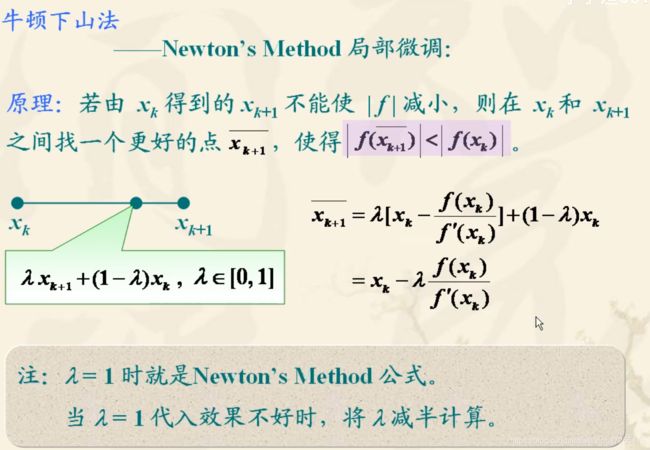
牛顿下山法
function [x,iter,X] = newton_down(fun,x0,eps,maxiter)
%牛顿下山法求非线性方程的根
%输入参数:
%——fun:迭代函数
%——x0:初始迭代点
%——eps:精度要求,默认值为1e-6
%——maxiter:最大迭代次数,默认1e4
%输出参数:
%——x:非线性方程组的近似根
%——iter:迭代次数
%——X:每一步迭代的结果
if nargin<2
error('输入参数至少需要3个');
end
if nargin<3
isempty(eps);
eps=1e-6;
end
if nargin<4
isempty(maxiter);
maxiter=1e4;
end
[fx0,dfx0]=feval(fun,x0);
k=0;tol=fx0/dfx0;
while abs(tol)>eps
lambda=1;
[fx0,dfx0]=feval(fun,x0);
x1=x0-lambda*fx0/dfx0;
[fx1,dfx1]=feval(fun,x1);
while abs(fx1)>=abs(fx0)%保证迭代后的函数值比之前小
lambda=lambda/2;
x1=x0-lambda*fx0/dfx0;%牛顿迭代下山
[fx1,dfx1]=feval(fun,x1);
x0=x1;
end
tol=fx1/dfx1;
k=k+1;
x0=x1;
X(k)=x1;
end
if k>=maxiter
error('迭代次数超限')
end
x=x1;iter=k;X=X';
end
割线法

function [x,iter,X] = secant(fun,x0,eps,maxiter)
%割线法求非线性方程的根
%输入参数:
%——fun:迭代函数
%——x0:初始迭代点
%——eps:精度要求,默认值为1e-6
%——maxiter:最大迭代次数,默认1e4
%输出参数:
%——x:非线性方程组的近似根
%——iter:迭代次数
%——X:每一步迭代的结果
if nargin<2
error('输入参数至少需要3个');
end
if nargin<3
isempty(eps);
eps=1e-6;
end
if nargin<4
isempty(maxiter);
maxiter=1e4;
end
f0=feval(fun,x0);%计算x0处的函数值
f1=feval(fun,x1);%计算x1处的函数值
k=0;
while err>eps
k=k+1;
x2=x1-f1*(x1-x0)/(f1-f0);
f0=f1;
x0=x1;x1=x2;
f1=feval(fun,x1);%计算x1处的函数值
X(k)=x1;
end
if k>=maxiter
error('迭代次数超限')
end
x=x2;iter=k;X=X';
end
实例
求解humps函数在区间[0,2]的零点
x=0:0.01:2;
fun=@(x)1./((x-.3).^2+.01)+1./((x-.9).^2+.04)-6;%定义函数表达式
[x1,fx1]=bisect(fun,0,2,1e-10);%二分法求解
plot(x,humps(x),[0,2],[0,0],'k',x1,fx1,'k*')
text(1,40,['humps函数零点{\itx}^*=',num2str(x1)])
title('humps函数零点求解')