五、ROS使用serial包进行串口通信
五、ROS使用serial包进行串口通信
-
- 1.下载串口调试助手CuteCom
- 2.下载虚拟串口模拟器socat
- 3.下载串口调试助手minicom
- 4.安装serial串口功能包
- 5.创建工作空间
- 6.创建功能包
- 7.创建发布者
- 8.配置CMakeLists.txt
- 9.运行发布者节点
- 10.创建订阅者
- 11.重新配置CMakeLists.txt
- 12.运行节点
1.下载串口调试助手CuteCom
CuteCom是Linux下少数带有界面的串口调试助手
sudo apt-get install cutecom

2.下载虚拟串口模拟器socat
为了方便调试,再下载一个虚拟串口模拟器socat
sudo apt-get install socat
输入指令,生成虚拟串口
socat -d -d pty,raw,echo=0 pty,raw,echo=0
观察终端输出的日志,注意/dev/pts/6 和/dev/pts/7,这两个口就是虚拟串口对,不同的设备生成的会不一样,而且名称经常会变,之后我们可以像访问真实的串口设备一样访问这两个虚拟串口了,但是注意:若要使得这对虚拟串口一直有效,必须使这个终端一直开着
然后再新建一个终端,输入以下指令,监听/dev/pts/6中的数据
cat < /dev/pts/6
然后再新建一个终端,输入以下指令,让虚拟串口/dev/pts/7对 /dev/pts/6发送数据
sudo echo 666 > /dev/pts/7
然后可以看到6实时接收到7发送过来的数据

3.下载串口调试助手minicom
但是CuteCom找不到socat生成的虚拟串口,很迷,不知道为啥
所以如果手头暂时没有设备,要创建虚拟串口来调试代码,可以换一款串口调试助手
下载minicom
sudo apt install minicom
使用前配置minicom,这个界面就很捞
minicom -s
先写一个脚本,让minicom往虚拟串口循环发送数据(模拟传感器)

#!/bin/bash
flag=1
while [ $flag = 1 ]
do
echo "hahahahahahahaha 666666666666666"
sleep 1
done
!是特殊的表示符,其后面跟的是解释此脚本的shell的路径
用管理员权限打开minicom,配置一下脚本路径
sudo minicom -s
- 控制键盘方向建,选中
Filenames and paths,回车: - 键盘输入D,进入
Script Program,添加脚本路径 - 设置为
/bin/bash,回车保存退出 - 返回设置界面,选中
Save setup as def,回车保存为默认设置,退出minicom。这样设置完毕以后,每次重新打开minicom,解释此脚本的shell路径就一直被保存在那里了

打开minicom,配置串口的一些设置,并运行test.sh脚本
minicom -s
控制键盘方向建,选中Serial port setup,回车:
- 键盘输入 A,光标会跳到第一行最后,编辑想要连接的串口,比如我这次的设备使用的串口是 /dev/pts/4,运行脚本让虚拟串口4往外发送数据,编辑完回车保存;
- 键盘输入 E,弹出波特率选项,输入选项的字母,回车保存,或者ESC退出;
- 键盘输入 F,改为 No;
- 键盘输入 G,改为 No。

设置完后,回车,返回设置界面,选中Exit,回车就可以输入命令了
- 按下Ctrl + A,再按Z进入帮助界面
- 输入G,选择
run scripts(G) - 输入C,在
Name of script中输入脚本的绝对路径/home/yao/My_Ros_WorkSpace/test.sh - 回车保存
- 再回车,即可执行test.sh脚本
可以看到虚拟串口4执行脚本后,往外发送数据到虚拟串口9(他俩默认是通的)
4.安装serial串口功能包
sudo apt install ros-melodic-serial
5.创建工作空间
首先进入一个不含中文路径的目录,右键在终端打开,新建一个文件夹collect_workspace作为工作空间
mkdir collect_workspace
cd collect_workspace
mkdir src
cd src
catkin_init_workspace
cd ..
catkin_make
catkin_make install
code .
将工作空间用VSCode打开,提高开发效率
每次新建一个工作空间都需要重新配置编译规则,这里可以看我前面的文章
6.创建功能包
选中src,右键Create Catkin Package
录入功能包名字"collect_pkg",回车
录入依赖"roscpp rospy std_msgs serial",再回车
避免依赖名字可能写错了,也可以(Ctrl + Shift + B)编译一下,看看有没有问题!
其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个基本的库,这里因为要用到serial,所以需要将刚下载的包添加进来
目的:发布者实时获取从串口发送过来的数据(传感器采集的数据),并对数据进行处理,将处理完的数据通过消息发送出去,订阅者实时接收这个消息。
7.创建发布者
选中collect_pkg→src,右键新建一个发布者的实现代码myserial_pub.cpp
修改 .vscode/c_cpp_properties.json,设置 "cppStandard"为 “c++17”并保存,否则会报错
#include8.配置CMakeLists.txt
# 生成可执行文件
add_executable(myserial_pub src/myserial_pub.cpp)
# 链接库
target_link_libraries(myserial_pub ${catkin_LIBRARIES})
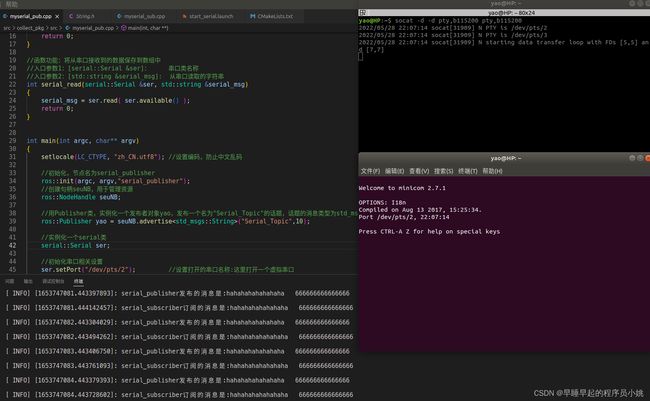
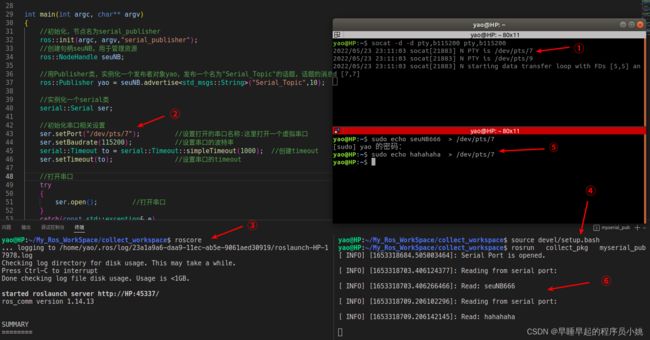
9.运行发布者节点
打开一个终端,输入指令,生成虚拟串口
socat -d -d pty,b115200 pty,b115200
根据生成的虚拟串口,重新设置一下代码中的串口名称,必须一致,例如这里选择/dev/pts/7,否则无法打开串口,然后Ctrl + S保存、Ctrl + Shift + B编译
在VSCode中新建一个终端,运动ROS master
roscore
再新建一个终端,运行发布者节点
source devel/setup.bash
rosrun collect_pkg myserial_pub
然后外面再新建一个终端,往/dev/pts/7中写入数据
10.创建订阅者
选中collect_pkg→src,右键新建一个发布者的实现代码myserial_sub.cpp
#include "ros/ros.h"
#include "std_msgs/String.h"
void mesg2333_callback(const std_msgs::String::ConstPtr &msg_p)//订阅到的消息是std_msgs::string类型,这个函数的参数类型是它的常量指针的引用
{
//通过msg获取订阅到的消息,并对它进行处理,即在终端中打印出来
ROS_INFO("serial_subscriber订阅的消息是:%s",msg_p->data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_CTYPE, "zh_CN.utf8"); //设置编码,防止中文乱码
//初始化节点名为:serial_subscriber
ros::init(argc,argv,"serial_subscriber");
//创建句柄seuNB666,用来管理资源
ros::NodeHandle seuNB666;
//用Subscriber类,实例化一个发布者对象,发布一个名为"Serial_Topic"的话题,话题的消息类型为std_msgs::String,消息发布队列长度为10(注意话题名中间不能有空格)
ros::Subscriber yao666 = seuNB666.subscribe<std_msgs::String>("Serial_Topic",10,mesg2333_callback); //订阅的话题名,队列长度,回调函数
//循环读取接收的数据,并调用回调函数处理:mesg2333_callback()每订阅到一次消息都需要执行一次,为了让回调函数多次执行,需要再执行完一次之后需要回头
ros::spin();
return 0;
}
然后再修改一下发布者输出日志的一些信息
#include11.重新配置CMakeLists.txt
增加两句
# 生成可执行文件
add_executable(myserial_pub src/myserial_pub.cpp)
# 链接库
target_link_libraries(myserial_pub ${catkin_LIBRARIES})
# 生成可执行文件
add_executable(myserial_sub src/myserial_sub.cpp)
# 链接库
target_link_libraries(myserial_sub ${catkin_LIBRARIES})
12.运行节点
然后在功能包"collect_pkg"下面,新建一个名为"launch"的文件夹
然后在名为"launch"的文件夹里面继续新建一个后缀为.launch的文件,名字随便起
我这里是"start_serial.launch",主要是为了启动串口通讯的两个节点
<launch>
<!--添加被执行的节点-->
<!-- <node pkg="功能包名" type="CMakeLists中配置的可执行文件名" name="为节点简单的命名一下,这个name可以随便取" output="设置日志的输出目标" /> -->
<!--启动发布者-->
<node pkg="collect_pkg" type="myserial_pub" name="publisher_node" output="screen" />
<!--启动订阅者-->
<node pkg="collect_pkg" type="myserial_sub" name="subscriber_node" output="screen"/>
</launch>
外部终端1
socat -d -d pty,b115200 pty,b115200
修改虚拟串口名,Ctrl + S保存,Ctrl + Shift + B编译
VScode终端
source devel/setup.bash
roslaunch collect_pkg start_serial.launch
外部终端2
minicom -s
设置虚拟串口名/dev/pts/XXX
输入脚本路径/home/yao/My_Ros_WorkSpace/test.sh