每天一篇论文 271/365 A Framework for Depth Estimation and Relative Localization of Ground Robots Using Com
A Framework for Depth Estimation and Relative Localization of Ground Robots Using Computer Vision
摘要
分散式结构中的三维深度估计和相对位姿估计问题是需要多个视觉控制机器人协调的任务中出现的一个具有挑战性的问题。深度估计问题旨在恢复环境的三维信息。相对定位问题包括估计两个机器人之间的相对姿态、感知彼此的姿态或共享感知环境的信息。这些问题的大多数解决方案使用一组离散数据,而不考虑事件的时间顺序。本文在连续估计的基础上,提出了一种非完整飞行器的深度和相对姿态估计框架。其基本思想是通过明确考虑安装在地面机器人上的摄像机的动力学特性来估计点的深度,并将两个摄像机观测到的三维点的估计值输入到计算机器人之间相对姿态的滤波器中。我们对一组模拟场景的收敛性进行了评估,并给出了验证该框架的实验结果。
本文提出了基于深度估计的两个机器人互相估计两者的相对位置定位。
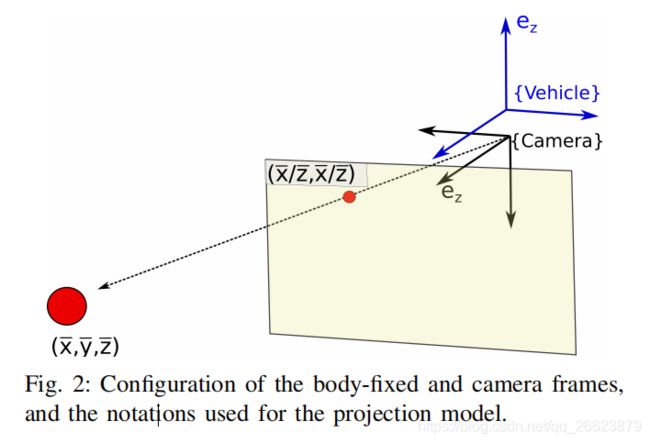
相机和机身的相对位置转换。机身固定和相机框架的配置,以及用于投影模型的符号。
系统结构组成
通过场景中固定的标点,通过该点进行深度估计,在有深度的基础上,估计另一个机器人的相对位置

