STM32循迹PWM调速及阿克曼舵机转向
1,准备
红外循迹模块,L298N电机驱动模块,STM32C8T6最小系统,SG90舵机,KEIL5
2,涉及的理论知识和硬件参考
理论
阿克曼转向是一种现代汽车的转向方式,在汽车转弯的时候,内外轮转过的角度不一样, 内侧轮胎转弯半径小于外侧轮胎。下图就是理想的阿克曼转向。

根据阿克曼转向几何设计转向机构,在车辆沿着弯道转弯时,利用四连杆的相等曲柄, 可以使内侧轮的转向角比外侧轮大大约 2~4 度,使四个轮子路径的圆心大致上交会于后轴的 延长线上瞬时转向中心,从而让车辆可以顺畅的转弯。


如果把每个轮子的运动半径画出来的话,就会得到图上所示画面。倒库比正着往里开更容易,因为后轮的运动半径小于前轮的 运动半径,所以相对于两前轮而言,后轮的运动范围更小,这也就意味着更容易将车“塞” 进停车位。
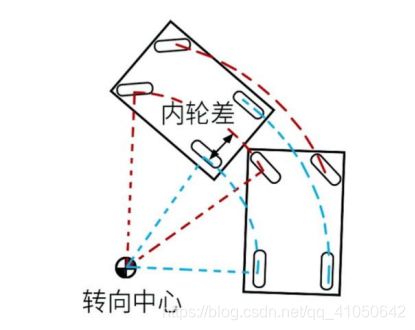
在车辆转弯的时候,内侧车轮的转弯半径明显会短于外侧车轮。这时,如果我们希望两 个转向轮可以正常转弯,就需要让内侧车轮的转角大于外侧车轮。

小车硬件
(1)红外循迹模块
一般就是数字红外输出和模拟红外输出,两种都可以,最终都是检测红外光返回是否符合要求。比如数字红外,当检测到黑线时,大部分红外光被吸收,红外模块引脚输出高电平1,当无黑线时,红外模块引脚输出低电平0。
(2)L298N驱动模块
这WE里采用六线接口L298N,即ENA,ENB,IN1,IN2,IN3,IN4.根据资料说明,由于本代码采用PWM调速,所以ENA,ENB作为PWM接收端。
(3)SG90舵机
SG90舵机的控制需要一个20ms时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围
PWM周期为20ms = (7200*200)/72000000=0.02所以TIM_Period = 199,TIM_Prescaler = 7199
(4)STM32C8T6最小系统
通用定时器2和4,GPIO,时钟配置等。这里有个细节就是定时器与管脚选择有关,需看最小系统芯片原理图为基础配置定时器。
3,代码实践(以下代码已完整,可自行调试)
(1)配置各个控制连接引脚及功能
void OUT_Init(void)//控制电机引脚配置
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
PIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_12|GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_13);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_0);
GPIO_ResetBits(GPIOB,GPIO_Pin_1);
}
void TIM2_PWM_Init(u16 arr,u16 psc)//PWM控制调速电机输出配置
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//开启定时器2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM2,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse =0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse =0;
TIM_OC4Init(TIM2, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
void TIM4_PWM_Init(u16 arr1,u16 psc1)//PWM输出控制舵机角度引脚及功能配置
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //B_8引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr1;
TIM_TimeBaseStructure.TIM_Prescaler =psc1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC3Init(TIM4, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM4, ENABLE);
TIM_Cmd(TIM4, ENABLE);
}
void INFR_Init(void)//红外引脚接收引脚配置
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//GPIOC时钟//此处由于引脚数量限制开启两个GPIO始终端口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;//此处配置为浮空输入模式,便于检测红外模块高低电平状态,以此判断循迹状态
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_ResetBits(GPIOC,GPIO_Pin_15);
}
(2)电机运动模式配置
void forward(void)
{
TIM_SetCompare3(TIM4,187);//-------PB_8----定时器4通道3控制舵机转向
TIM_SetCompare3(TIM2,1000);//-------ENA--PB_10--定时器2通道3电机调速
GPIO_SetBits(GPIOB,GPIO_Pin_12);//-----IN1--PB_12
GPIO_ResetBits(GPIOB,GPIO_Pin_13);//----IN2--PB_13
TIM_SetCompare4(TIM2,1000);//-------ENB---PB_11-定时器2通道4电机调速
GPIO_SetBits(GPIOB,GPIO_Pin_0);//----IN3---PB_0
GPIO_ResetBits(GPIOB,GPIO_Pin_1);//-----IN4---PB_1
}
void turnleft(void)//
{
TIM_SetCompare3(TIM4,150);
TIM_SetCompare3(TIM2,50);//-------ENA--PB10--
GPIO_SetBits(GPIOB,GPIO_Pin_12);//-----IN1
GPIO_ResetBits(GPIOB,GPIO_Pin_13);//----IN2
TIM_SetCompare4(TIM2,1000);//-------ENB---PB11-
GPIO_SetBits(GPIOB,GPIO_Pin_0);//----IN3
GPIO_ResetBits(GPIOB,GPIO_Pin_1);//-----IN4
}
void turnright(void)//
{
TIM_SetCompare3(TIM4,100);
TIM_SetCompare3(TIM2,1000);//-------ENA--PB10
GPIO_SetBits(GPIOB,GPIO_Pin_12);//-----IN1
GPIO_ResetBits(GPIOB,GPIO_Pin_13);//----IN2
TIM_SetCompare4(TIM2,50);//-------ENB---PB11
GPIO_SetBits(GPIOB,GPIO_Pin_0);//----IN3
GPIO_ResetBits(GPIOB,GPIO_Pin_1);//-----IN4
}
void stop(void)
{
TIM_SetCompare3(TIM2,1500);//pwm
TIM_SetCompare4(TIM2,1500);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);//·
GPIO_ResetBits(GPIOB,GPIO_Pin_13);
GPIO_ResetBits(GPIOB,GPIO_Pin_0);//
GPIO_ResetBits(GPIOB,GPIO_Pin_1);
}
void turnleft2(void)//
{
TIM_SetCompare3(TIM4,150);
TIM_SetCompare3(TIM2,50);//-------ENA--PB10--
GPIO_SetBits(GPIOB,GPIO_Pin_12);//-----IN1
GPIO_ResetBits(GPIOB,GPIO_Pin_13);//----IN2
TIM_SetCompare4(TIM2,1000);//-------ENB---PB11--
GPIO_SetBits(GPIOB,GPIO_Pin_0);//----IN3
GPIO_ResetBits(GPIOB,GPIO_Pin_1);//-----IN4
}
void turnright2(void)//
{
TIM_SetCompare3(TIM4,100);
TIM_SetCompare3(TIM2,1000);//-------ENA--PB10
GPIO_SetBits(GPIOB,GPIO_Pin_12);//-----IN1
GPIO_ResetBits(GPIOB,GPIO_Pin_13);//----IN2
TIM_SetCompare4(TIM2,50);//-------ENB---PB11
GPIO_SetBits(GPIOB,GPIO_Pin_0);//----IN3
GPIO_ResetBits(GPIOB,GPIO_Pin_1);//-----IN4
}
(3)实现主函数搭配功能融合
int main(void)
{
int LXJ0,LXJ1,LXJ2,LXJ3,XJ4,RXJ5,RXJ6,RXJ7,RXJ15=0;
INFR_Init();
OUT_Init();
delay_init();
TIM4_PWM_Init(2000,719);
TIM2_PWM_Init(2000,719);
delay_ms(500);
elay_ms(500);
delay_ms(500);
delay_ms(500);¯
while(1)
{
LXJ0=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0);//读取红外引脚高低电平,
LXJ1=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1);//以此判断是否在黑线上
LXJ2=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_2);
LXJ3=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_3);
XJ4=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4);
RXJ5=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_5);
RXJ6=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6);
RXJ7=GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_7);
RXJ15=GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_15);
if((XJ4==1&&LXJ1==0&&LXJ2==0&&LXJ3==0&&RXJ5==0&&RXJ6==0&&RXJ7==0&&RXJ15==0&&LXJ0==0))
{
forward();
}
else if(LXJ3==1|XJ4==1&&LXJ0==0&&LXJ2==0&&LXJ3==0&&RXJ5==0&&RXJ6==0&&RXJ7==0&&RXJ15==0&&XJ4==0)
{
turnright();
}
else if(XJ4==1|RXJ5==1&&LXJ1==0&&LXJ0==0&&LXJ3==0&&RXJ5==0&&RXJ6==0&&RXJ7==0&&RXJ15==0&&XJ4==0)
{
turnleft();
}
else if(LXJ0==1|LXJ1==1|LXJ2==1&&LXJ1==0&&LXJ2==0&&LXJ0==0&RXJ5==0&&RXJ6==0&&RXJ7==0&RXJ15==0&&XJ4==0)
{
turnright2();
}
else if(RXJ6==1|RXJ7==1|RXJ15==1 &&LXJ1==0&&LXJ2==0&&LXJ3==0&&RXJ5==0&&RXJ6==0&&RXJ7==0&&RXJ15==0&&XJ4==0)
{
turnleft2();
}