(01)ORB-SLAM2源码无死角解析-(34) 跟踪线程→初步了解跟踪线程,参考关键帧追踪TrackReferenceKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件):
(01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196
文末正下方中心提供了本人 联系方式, 点击本人照片即可显示 W X → 官方认证 {\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证} 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
通过前面博客,相信大家已经了解很多 SLAM 的基础知识,比如ORB特征点、BRIEF描述子;根据Essential、Fundamental、Homography矩阵求解位姿;以及通过BoW加速特征匹配等。有了这些基础知识之后,下面就可以深入的了解 ORB-SLAM2 的整体架构了。ORB-SLAM2 的总体框架,图示如下:

该图主要表达了三个线程: 跟踪线程、局部建图线程、闭环线程大致流程。可以看到跟踪线程主要包含了: 提取 O R B 特征点 \color{blue}{提取ORB特征点} 提取ORB特征点、 地图初始化 \color{blue}{地图初始化} 地图初始化、 恒速模型跟踪 \color{blue}{恒速模型跟踪} 恒速模型跟踪、 参考关键帧跟踪 \color{blue}{参考关键帧跟踪} 参考关键帧跟踪、 重定位跟踪 \color{blue}{重定位跟踪} 重定位跟踪、 局部跟踪等 \color{blue}{局部跟踪等} 局部跟踪等。其中 提取ORB特征点 以及 地图初始化 已经进行过详细讲解。
另外,众所周知 SLAM 主要包含了定位与建图。这里所谓的定位,就是对相机进行定位,估算相机的位置与姿态(简称位姿)。跟踪线程的目标就是相机,计算相机的位姿。为什么呢? 如果把摄像头安装在机器人上面,知道了摄像头的位姿,就相当于知道了机器人的位姿,如果再结合建图,就能够实现很多功能了,扫地机器人就是一个很好的例子。
下面接下来要讲解的内容就是跟踪,跟踪线程的主要代码流程在 (01)ORB-SLAM2源码无死角解析-(13)追踪总体框架讲解→Tracking::Track() 博客中,进行了很粗略的讲解,估计大家再看的时候应该比较蒙蔽,其实大家只要领会核心思想即可。
核心思想 : \color{red}{核心思想:} 核心思想: 当前帧与上一帧(或者最近关键帧)进行特征点匹配,如果匹配点足够,则能计算出上一帧到当前帧的位姿变换,同时能够获得该关键点对在三维空间的坐标,显然易知对应的地图点。依次循环即可。
接下来,就会把跟踪线程拆分进行讲解。
二、跟踪线程图示
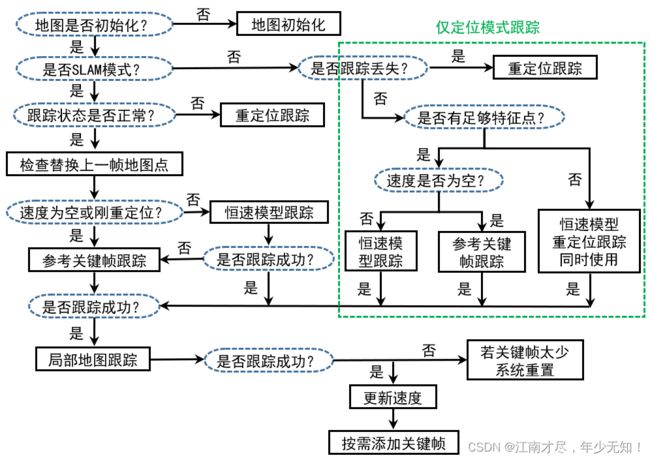
跟踪线程中,主要有两种模式,分别为SLAM(建图与定位)模式,仅定位模式。这两种模式涉及的内容是比较相似的,仅定位模式缺少了地图更新部分,相对来说跟简单一点。这里以 SLAM(建图与定位) 模式为例,因为其为常用模式,为大家梳理一下流程(结合上图) :
( 01 ) : \color{blue}{(01)}: (01): 相机传入第一张图像实现的时候,肯定没有进行初始化, 所以会进行地图初始化。如果为单目摄像头则会初始化失败,因为单目相机初始化需要连续两帧为关键帧才有可能初始化成功。
( 02 ) : \color{blue}{(02)}: (02): 初始化完成之后,下一帧进来为正常状态,其首先会检查并且替换上一帧的地图点。
( 03 ) : \color{blue}{(03)}: (03): 完成地图点的替换之后,会判断目前速度是否为空(如果上一帧才完成初始化,则速度为空)。速度为空使用参考关键帧跟踪。如果速度不为空那么就使用恒速模式跟踪。
( 04 ) : \color{blue}{(04)}: (04): 参考关键帧跟踪 或者 恒速模式跟踪 成功之后,会进入到局部地图跟踪(进行整体的位姿优化),如果局部地图跟踪成功则会进行速度更新,为下次的恒速模式跟踪做铺垫。
( 05 ) : \color{blue}{(05)}: (05): 另外,如果在跟踪的过程中,出现跟踪状态不正常(一般为匹配特征点、或者地图点过少),则使用重定位跟踪
三、核心函数列举
其上的过程中,对应源码,位于 Tracking.cc 文中的 Tracking::Track() 函数。该函数调用的如下几个函数是比较重要的:
//双目与单目初始化,其中单目初始化在前面已经进行过十分详细的讲解
StereoInitialization();
MonocularInitialization();
CheckReplacedInLastFrame();// 检查并更新上一帧被替换的MapPoints
TrackReferenceKeyFrame();// 用最近的关键帧来跟踪当前的普通帧
TrackWithMotionModel() // 用最近的普通帧来跟踪当前的普通帧
Relocalization() // 如果跟踪状态不成功,那么就只能重定位了
TrackLocalMap() //用局部地图进行跟踪,进一步优化位姿
NeedNewKeyFrame() //判断是否需要创建关键帧
CreateNewKeyFrame() //如果需要创建关键帧则创建关键帧
其上有些函数已经在前面分析过了,接下来的几篇博客,主要是对其上TrackReferenceKeyFrame(), TrackWithMotionModel(), Relocalization() 三个核心跟踪函数进行讲解。
四、TrackReferenceKeyFrame()
根据前面的分析,可以知道,在初始化完成之后,紧接下来一帧使用的跟踪方式为参考帧跟踪,简单的说就是通过参考最近的关键帧,估算出当前帧的位姿。 其对应于 src/Tracking.cc 文件中的 TrackReferenceKeyFrame() 函数。该函数还是比较简单的,主要流程如下:
( 01 ) : \color{blue}{(01)}: (01): 将当前帧的描述子转化为BoW向量,该内容已经在前面进行了详细的讲解,主要作用就是对特征点进行归类,把所属节点相同的特征点归为一类,存储于Frame 的 mBowVec 与 mFeatVec 成员变量之中。
( 02 ) : \color{blue}{(02)}: (02): 根据计算出来的BoW向量进行特征匹配,该对应的函数为 SearchByBoW(),在前面进行过很详细的讲解。其返回的是关键帧与当前帧匹配特征点对,对应的地图点,也就是 vpMapPointMatches。
( 04 ) : \color{blue}{(04)}: (04): 首先将上一帧的的位姿作为当前帧的初始值(在PoseOptimization可以收敛快一些),然后通过优化3D-2D的重投影误差来获得位姿,该内容在下一篇博客中进行详细的讲解。
( 05 ) : \color{blue}{(05)}: (05): 剔除优化后的匹配点中的外点,清除外点在当前帧中存在过的痕迹。扣除外点之后匹配数目在10个以上,则认为是追踪成功。
五、源码注释
src/Tracking.cc 文件中的 TrackReferenceKeyFrame() 函数注释如下:
/*
* @brief 用参考关键帧的地图点来对当前普通帧进行跟踪
*
* Step 1:将当前普通帧的描述子转化为BoW向量
* Step 2:通过词袋BoW加速当前帧与参考帧之间的特征点匹配
* Step 3: 将上一帧的位姿态作为当前帧位姿的初始值
* Step 4: 通过优化3D-2D的重投影误差来获得位姿
* Step 5:剔除优化后的匹配点中的外点
* @return 如果匹配数超10,返回true
*
*/
bool Tracking::TrackReferenceKeyFrame()
{
// Compute Bag of Words vector
// Step 1:将当前帧的描述子转化为BoW向量
mCurrentFrame.ComputeBoW();
// We perform first an ORB matching with the reference keyframe
// If enough matches are found we setup a PnP solver
ORBmatcher matcher(0.7,true);
vector<MapPoint*> vpMapPointMatches;
// Step 2:通过词袋BoW加速当前帧与参考帧之间的特征点匹配
int nmatches = matcher.SearchByBoW(
mpReferenceKF, //参考关键帧
mCurrentFrame, //当前帧
vpMapPointMatches); //存储匹配关系
// 匹配数目小于15,认为跟踪失败
if(nmatches<15)
return false;
// Step 3:将上一帧的位姿态作为当前帧位姿的初始值
mCurrentFrame.mvpMapPoints = vpMapPointMatches;
mCurrentFrame.SetPose(mLastFrame.mTcw); // 用上一次的Tcw设置初值,在PoseOptimization可以收敛快一些
// Step 4:通过优化3D-2D的重投影误差来获得位姿
Optimizer::PoseOptimization(&mCurrentFrame);
// Discard outliers
// Step 5:剔除优化后的匹配点中的外点
//之所以在优化之后才剔除外点,是因为在优化的过程中就有了对这些外点的标记
int nmatchesMap = 0;
for(int i =0; i<mCurrentFrame.N; i++)
{
if(mCurrentFrame.mvpMapPoints[i])
{
//如果对应到的某个特征点是外点
if(mCurrentFrame.mvbOutlier[i])
{
//清除它在当前帧中存在过的痕迹
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
mCurrentFrame.mvpMapPoints[i]=static_cast<MapPoint*>(NULL);
mCurrentFrame.mvbOutlier[i]=false;
pMP->mbTrackInView = false;
pMP->mnLastFrameSeen = mCurrentFrame.mnId;
nmatches--;
}
else if(mCurrentFrame.mvpMapPoints[i]->Observations()>0)
//匹配的内点计数++
nmatchesMap++;
}
}
// 跟踪成功的数目超过10才认为跟踪成功,否则跟踪失败
return nmatchesMap>=10;
}
六、源码注释
通过该篇博客,首先了解了跟踪线程的总体流程,另外还对对跟踪线程中比较重要的函数→参考关键帧追踪TrackReferenceKeyFrame()进行了讲解。但是这里有一个比较重要的地方还没有进行详细的讲解。那就是其中的函数 Optimizer::PoseOptimization(&mCurrentFrame); 该部分内容暂且略过一下,后面在优化的篇章中,会进行详细的讲解。
本文内容来自计算机视觉life ORB-SLAM2 课程课件