OpenCV:10.霍夫检测(直线、圆检测)与重映射(镜像翻转)
霍夫检测【直线、圆检测】与重映射【镜像翻转】
- 1. 霍夫直线检测
- 2. 霍夫圆检测
- 3.重映射
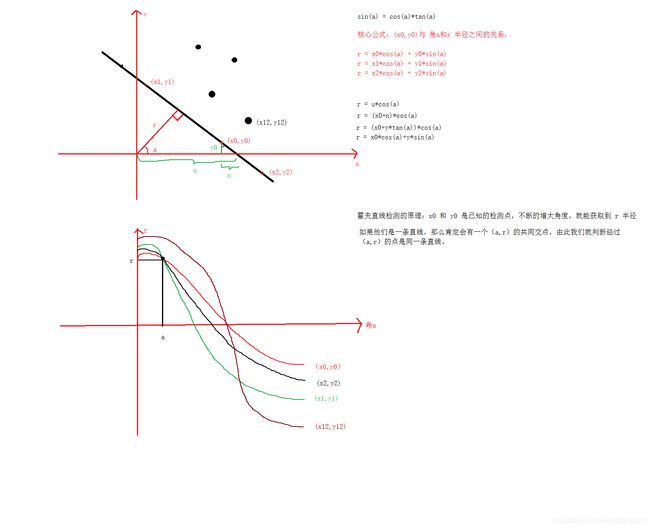
1. 霍夫直线检测
作用:检测图片当中点集合中的直线。(比如提取图片中的直线:车道线)
先来看下原理图:
再来看下opencv中的代码
int main(){
Mat src = imread("E:/houghLine.jpg");
if (!src.data){
cout << "read error" << endl;
return -1;
}
imshow("src",src);
// 1. Canny 边缘检测
Mat gray;
cvtColor(src,gray,COLOR_BGR2GRAY);
Mat cannyImage;
Canny(gray,cannyImage,200,250,3);
imshow("cannyImage", cannyImage);
// 2. HoughLineP
vector plines;
// lines 信息里面包含多条直线,每条直线两个点
// rho 像素间隙扫描
// theta 每次增加的角度 CV_PI / 180 = 1度
// threshold 低阈值
// minLineLength 线的最小长度
// maxLineGap 线点之间的间隙
HoughLinesP(cannyImage, plines, 1, CV_PI / 360, 170, 30, 15);
for (int i = 0; i < plines.size(); i++)
{
Vec4f pline = plines[i];
line(src, Point(pline[0], pline[1]), Point(pline[1], pline[2]), Scalar(0,0,255));
}
imshow("result",src);
//HoughLines
waitKey(0);
return 0;
}
2. 霍夫圆检测
先来看下原理图:

解释:
- 梯度的求取:类似于 x、y 轴的垂直,梯度求取就是
取各个点各个方向直线的垂直线,投票将 相交的次数大于多少的才算作圆
int main(){
Mat src = imread("E:/HoughCircle.jpg");
if (!src.data){
cout << "read error" << endl;
return -1;
}
imshow("src", src);
// 1. 转灰度图
Mat gray;
cvtColor(src, gray, COLOR_BGR2GRAY);
// 2. HoughLineP
vector circles;
// minDist:10 两个圆之间的最小距离 越大越能减少同心圆的现象
// param1:100 投票累加结果超过多少才能算圆
// params2:30 低阈值
// minRadius: 5 最小的半径
// maxRadius: 50 最大的半径
HoughCircles(gray, circles, HOUGH_GRADIENT, 1, 40, 100, 30,5,50);
for (int i = 0; i < circles.size(); i++)
{
Vec3f cc = circles[i];
circle(src, Point(cc[0], cc[1]), cc[2], Scalar(0, 0, 255),1,LINE_AA);
}
imshow("result", src);
//HoughLines
waitKey(0);
return 0;
}
3.重映射
remap 根据原图按照新定的满足一定规律重新赋值的操作。
g(x,y) = f(h(x,y)) g 新的图片 = h 原图 , f 函数,
可用于镜像翻转
int main(){
Mat src = imread("E:/copy.png");
if (!src.data){
cout << "read error" << endl;
return -1;
}
imshow("src", src);
Mat map_x(src.size(),CV_32F);
Mat map_y(src.size(), CV_32F);
for (int row = 0; row < src.rows; row++)
{
for (int col = 0; col < src.cols; col++)
{
// x 轴的翻转
//map_x.at(row, col) = src.cols - col - 1;
//map_y.at(row, col) = row;
// y 轴的翻转
map_x.at(row, col) = col;
map_y.at(row, col) = src.rows - row;
}
}
Mat dst;
remap(src, dst, map_x, map_y, 1);
imshow("dst", dst);
//HoughLines
waitKey(0);
return 0;
}