【硬件】硬件随机失效定量分析
1 安全故障分类
故障归类为:
a,单点故障
b,残余故障
示例 1: 硬件要素可能有“开路”, “对地短路”, “短路接高”故障, 但是只有“开路”和“对地短路”的故障被安全机制所
覆盖。 如果“短路接高”故障导致违背了特定安全目标, 且没有被安全机制所覆盖, 那么它是一种残余故障。
c,多点故障,多点故障的分类需要区分“潜伏多点故障”、 “可探测的多点故障”和“可感知的多点故障
d,安全故障
 编辑
编辑
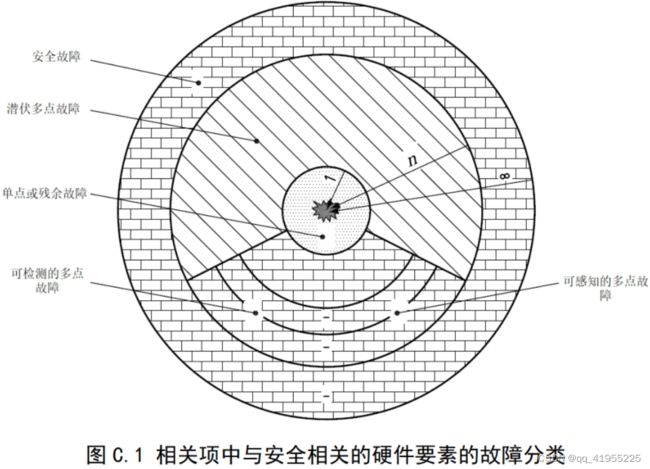
在该图示中:
——距离 n 表示了在同一时刻存在的导致违背一个安全目标的独立故障的数量(n=1 对应单点
故障或者残余故障, n=2 对应双点故障, 等);
——距离等于 n 的故障位于圆环 n 和 n-1 之间的区域; 及
——除非在技术安全概念中表明相关, 否则认为距离高于 n=2 的多点故障是安全故障。
2 安全相关硬件要素失效率
假设所有的失效都是互相独立的, 且遵循指数分布,每个安全相关硬件要素的失效率λ, 都能按照等式(C.1)来表述:
![]() 编辑
编辑
式中:
λ SPF —— 与硬件要素单点故障相关联的失效率;
λ RF —— 与硬件要素残余故障相关联的失效率;
λ MPF —— 与硬件要素多点故障相关联的失效率;
λ S —— 与硬件要素安全故障相关联的失效率。
硬件要素多点故障相关联的失效率, λ MPF, 能按照等式(C.2)来表述:
![]()
式中:
λ MPF, DP —— 与硬件要素可察觉或者可探测的多点故障相关联的失效率;
λ MPF, L —— 与硬件要素潜伏故障相关联的失效率。
3 诊断覆盖率估算
(1)一个关于残余故障的失效率的保守估算公式:

式中:
λ RF, est —— 关于残余故障的估算的失效率;
λ —— 一个安全相关硬件要素的失效率λ;
KDC,RF(也称为DCRF) —— 关于残余故障的诊断覆盖率, 用百分比表示。

(2)关于潜伏故障的失效率的保守估算公式:

式中:
λ MPF,L,est —— 关于潜伏故障的估算的失效率;
KDC,MPF,L (也称为DCMPF,L) —— 关于潜伏故障的诊断覆盖率, 用百分比表示。
注 4: 当已知失效模式分布和失效模式覆盖率时, λMPF, L能按如下方式计算:

4 故障度量
4.1 单点故障度量
这个度量反映了相关项通过安全机制覆盖或通过设计手段( 主要为安全故障) 实现的对单点故障和残余故障的鲁棒性。 高的单点故障度量值意味着相关项硬件的单点故障和残余故障所占的比例低。
本要求适用于等级为ASIL (B)、 C和D的安全目标。 等式(C.7)中的计算应用于确定单点故障度量:

 —— 在度量中考虑的相关项安全相关硬件要素的λ x总和;
—— 在度量中考虑的相关项安全相关硬件要素的λ x总和;
λ SPF —— 与硬件要素单点故障相关联的失效率;
λ RF —— 与硬件要素残余故障相关联的失效率;
图示:

4.2 潜伏故障度量
这个度量反映了相关项通过安全机制覆盖、 通过驾驶员在安全目标违背之前识别、 或通过设计手段(主要为安全故障) 实现的对潜伏故障的鲁棒性。 高的潜伏故障度量值意味着硬件的潜伏故障所占的比例低。
适用于等级为ASIL(B)、(C)和D的安全目标。 等式(C.8)中的计算应用于确定潜伏故障度量:

 —— 在度量中考虑的相关项安全相关硬件要素的λ x总和。
—— 在度量中考虑的相关项安全相关硬件要素的λ x总和。
λ MPF, DP —— 与硬件要素可察觉或者可探测的多点故障相关联的失效率;
λ MPF, L —— 与硬件要素潜伏故障相关联的失效率。
λ S —— 与硬件要素安全故障相关联的失效率。
λ SPF —— 与硬件要素单点故障相关联的失效率;
λ RF —— 与硬件要素残余故障相关联的失效率;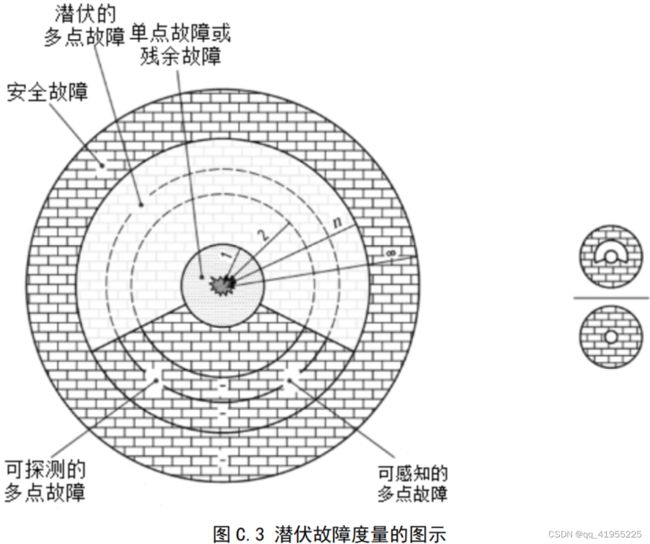
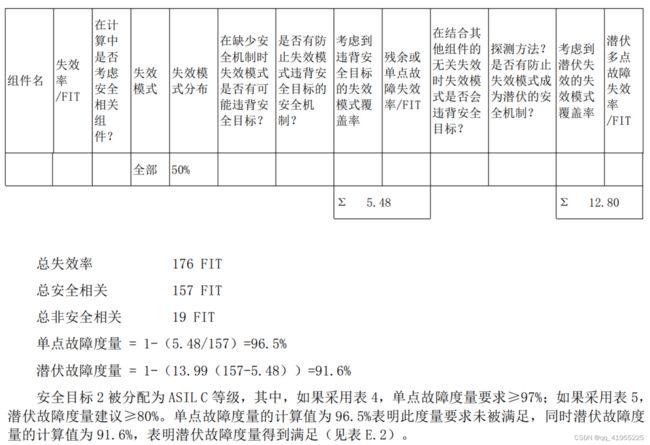
5 计算

。。。。