import一个“太极”库,让Python代码提速100倍
众所周知,Python的简单和易读性是靠牺牲性能为代价的——
尤其是在计算密集的情况下,比如多重for循环。
不过现在,大佬胡渊鸣说了:
只需import 一个叫做“Taichi”的库,就可以把代码速度提升100倍!
不信?
来看三个例子。
计算素数的个数,速度x120
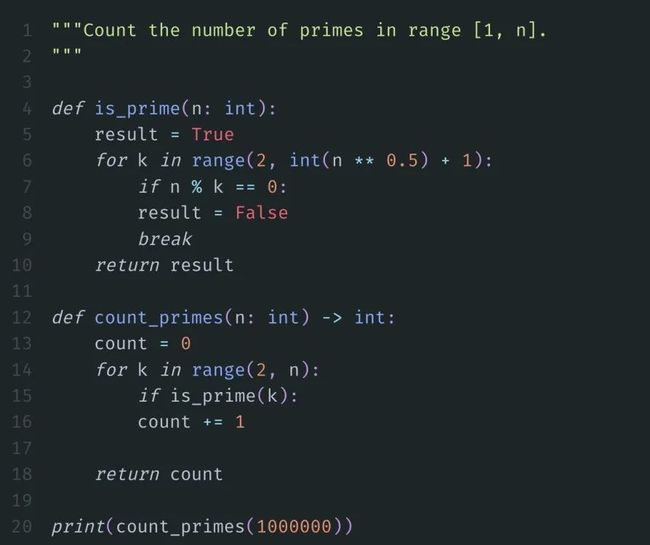
第一个例子非常非常简单,求所有小于给定正整数N的素数。
标准答案如下:
我们将上面的代码保存,运行。
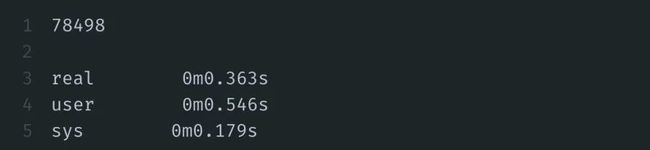
当N为100万时,需要2.235s得到结果:

现在,我们开始施魔法。
不用更改任何函数体,import“taichi”库,然后再加两个装饰器:
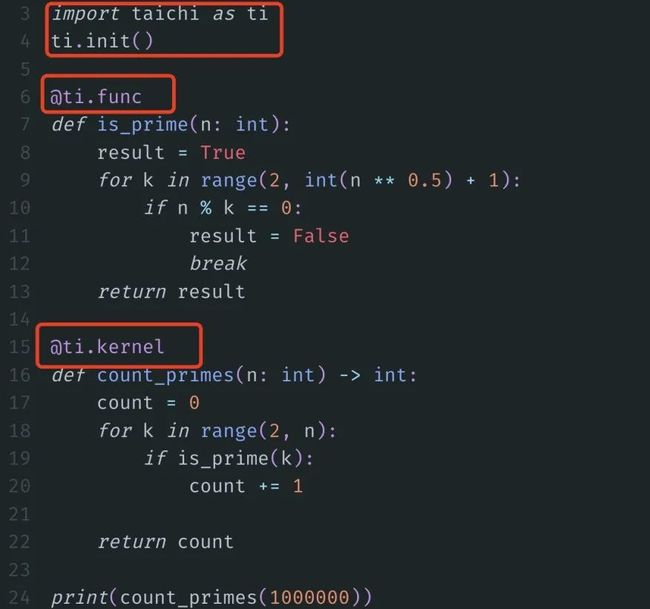
Bingo!同样的结果只要0.363s,快了将近6倍。
如果N=1000万,则只要0.8s;要知道,不加它可是55s,一下子又快了70倍!
不止如此,我们还可以在ti.init()中加个参数变为ti.init(arch=ti.gpu) ,让taich在GPU上进行计算。
那么此时,计算所有小于1000万的素数就只耗时0.45s了,与原来的Python代码相比速度就提高了120倍!
厉不厉害?
什么?你觉得这个例子太简单了,说服力不够?我们再来看一个稍微复杂一点的。
动态规划,速度x500
动态规划不用多说,作为一种优化算法,通过动态存储中间计算结果来减少计算时间。
我们以经典教材《算法导论》中的经典动态规划案例“最长公共子序列问题(LCS)”为例。
比如对于序列a = [0, 1, 0, 2, 4, 3, 1, 2, 1]和序列b = [4, 0, 1, 4, 5, 3, 1, 2],它们的LCS就是:
LCS(a, b) = [0, 1, 4, 3, 1, 2]。
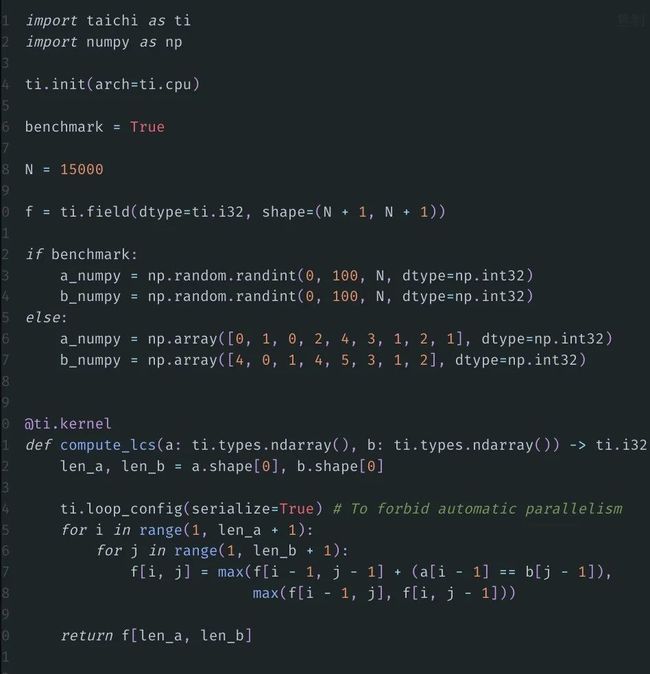
用动态规划的思路计算LCS,就是先求解序列a的前i个元素和序列b的前j个元素的最长公共子序列的长度,然后逐步增加i或j的值,重复过程,得到结果。
我们用f[i, j]来指代这个子序列的长度,即LCS((prefix(a, i), prefix(b, j)。其中prefix(a, i) 表示序列a的前i个元素,即a[0], a[1], …, a[i - 1],得到如下递归关系:

现在,我们用Taichi来加速:
结果如下:

胡渊鸣电脑上的程序最快做到了0.9秒内完成,而换成用NumPy来实现,则需要476秒,差异达到了超500倍!
最后,我们再来一个不一样的例子。
反应 - 扩散方程,效果惊人
自然界中,总有一些动物身上长着一些看起来无序但实则并非完全随机的花纹。

图灵机的发明者艾伦·图灵是第一个提出模型来描述这种现象的人。
在该模型中,两种化学物质(U和V)来模拟图案的生成。这两者之间的关系类似于猎物和捕食者,它们自行移动并有交互:
-
最初,U和V随机分布在一个域上;
-
在每个时间步,它们逐渐扩散到邻近空间;
-
当U和V相遇时,一部分U被V吞噬。因此,V的浓度增加;
-
为了避免U被V根除,我们在每个时间步添加一定百分比 (f) 的U并删除一定百分比 (k) 的V。
上面这个过程被概述为“反应-扩散方程”:

其中有四个关键参数:Du(U的扩散速度),Dv(V的扩散速度),f(feed的缩写,控制U的加入)和k(kill的缩写,控制V的去除)。
如果Taichi中实现这个方程,首先创建网格来表示域,用vec2表示每个网格中U, V的浓度值。
拉普拉斯算子数值的计算需要访问相邻网格。为了避免在同一循环中更新和读取数据,我们应该创建两个形状相同的网格W×H×2。
每次从一个网格访问数据时,我们将更新的数据写入另一个网格,然后切换下一个网格。那么数据结构设计就是这样:

一开始,我们将U在网格中的浓度设置为 1,并将V放置在50个随机选择的位置:
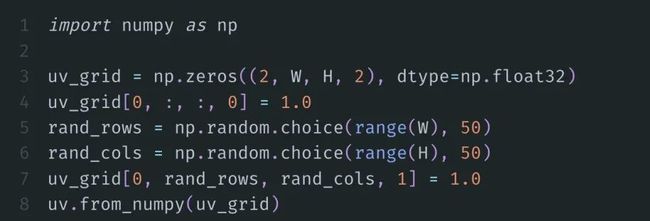
那么实际计算就可以用不到10行代码完成:
@ti.kernel
def compute(phase: int):
for i, j in ti.ndrange(W, H):
cen = uv[phase, i, j]
lapl = uv[phase, i + 1, j] + uv[phase, i, j + 1] + uv[phase, i - 1, j] + uv[phase, i, j - 1] - 4.0 * cen
du = Du * lapl[0] - cen[0] * cen[1] * cen[1] + feed * (1 - cen[0])
dv = Dv * lapl[1] + cen[0] * cen[1] * cen[1] - (feed + kill) * cen[1]
val = cen + 0.5 * tm.vec2(du, dv)
uv[1 - phase, i, j] = val在这里,我们使用整数相位(0或1)来控制我们从哪个网格读取数据。
最后一步就是根据V的浓度对结果进行染色,就可以得到这样一个效果惊人的图案:
有趣的是,胡渊鸣介绍,即使V的初始浓度是随机设置的,但每次都可以得到相似的结果。
而且和只能达到30fps左右的Numba实现比起来,Taichi实现由于可以选择GPU作为后端,轻松超过了 300fps。
pip install即可安装
看完上面三个例子,你这下相信了吧?
其实,Taichi就是一个嵌入在Python中的DSL(动态脚本语言),它通过自己的编译器将被 @ti.kernel 装饰的函数编译到各种硬件上,包括CPU和GPU,然后进行高性能计算。
有了它,你无需再羡慕C++/CUDA的性能。
正如其名,Taichi就出自太极图形胡渊鸣的团队,现在你只需要用pip install就能安装这个库,并与其他Python库进行交互,包括NumPy、Matplotlib和PyTorch等等。
当然,Taichi用起来和这些库以及其他加速方法有什么差别,胡渊鸣也给出了详细的优缺点对比,感兴趣的朋友可以戳下面的链接详细查看:
太极taichi