学习笔记三:深度学习DNN2
文章目录
-
- 一、神经网络参数优化器
-
- 1.2 SGD(无动量)随机梯度下降。
- 1.3 SGDM——引入动量减少震荡
- 1.4 SGD with Nesterov Acceleration
- 1.5 AdaGrad——累积全部梯度,自适应学习率
- 1.6 RMSProp——累积最近时刻梯度
- 1.7 Adam
- 1.8 悬崖、鞍点问题
- 二、过拟合解决方案
-
- 2.1 正则化
- 2.2 dropout
- 2.3 Batch Normalization
- 2.4 Layer Normalization
一、神经网络参数优化器
参考曹健《人工智能实践:Tensorflow2.0 》
深度学习优化算法经历了SGD -> SGDM -> NAG ->AdaGrad -> AdaDelta -> Adam -> Nadam
这样的发展历程。

- 上图中f一般指loss
- 一阶动量:与梯度相关的函数
- 二阶动量:与梯度平方相关的函数
- 不同的优化器,实质上只是定义了不同的一阶动量和二阶动量公式
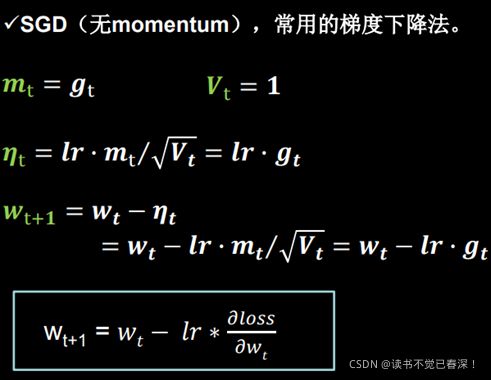
1.2 SGD(无动量)随机梯度下降。
- 最常用的梯度下降方法是随机梯度下降,即随机采集样本来计算梯度。根据统计学知识有:采样数据的平均值为全量数据平均值的无偏估计。
- 实际计算出来的SGD在全量梯度附近以一定概率出现,batch_size越大,概率分布的方差越小,SGD梯度就越确定,相当于在全量梯度上注入了噪声。适当的噪声是有益的。
- batch_size越小,计算越快,w更新越频繁,学习越快。但是太小的话,SGD梯度和真实梯度差异过大,而且震荡厉害,不利于学习
- SGD梯度有一定随机性,所以可以逃离鞍点、平坦极小值或尖锐极小值区域
- 最初版本是vanilla SGD,没有动量。 m t = g t , V t = 1 m_{t}=g_{t},V_{t}=1 mt=gt,Vt=1(p32—sgd.py)
-
每个bacth_size样本的梯度都不一样,甚至前后差异很大,造成梯度震荡。(比如一个很大的正值接一个很大的负值)
-
神经网络中,输入归一化。但是多层非线性变化后,中间层输入各维度数值差别可能很大。不同方向的敏感度不一样。有的方向更陡,容易震荡。
-
vanilla SGD最大的缺点是下降速度慢,而且可能会在沟壑的两边持续震荡,停留在一个局部最优
点
# sgd
w1.assign_sub(learning_rate * grads[0])
b1.assign_sub(learning_rate * grads[1])
1.3 SGDM——引入动量减少震荡
-
动量法是一种使梯度向量向相关方向加速变化,抑制震荡,最终实现加速收敛的方法。
-
为了抑制SGD的震荡,SGDM认为 梯度下降过程可以加入惯性。如果前后梯度方向相反,动量对冲,减少震荡。如果前后方向相同,步伐加大,加快学习速度。
-
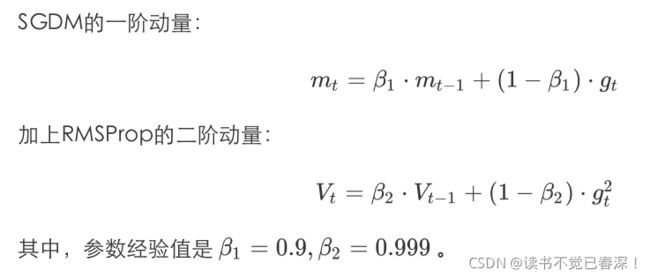
SGDM全称是SGD with Momentum,在SGD基础上引入了一阶动量:

-
一阶动量是各个时刻梯度方向的指数移动平均值,约等于最近 1 / ( 1 − β 1 ) 1/(1-\beta _{1}) 1/(1−β1)个时刻的梯度向量和的平均值。(指数移动平均值大约是过去一段时间的平均值,反映“局部的”参数信息 ) 。 β 1 )。\beta _{1} )。β1的经验值为0.9。所以t 时刻的下降方向主要偏向此前累积的下降方向,并略微偏向当前时刻的下降方向。

老师书上写 W t + 1 = W t − v t = W t − ( α v t − 1 + ε g t ) W_{t+1}=W_{t}-v_{t}=W_{t}-(\alpha v_{t-1}+\varepsilon g_{t}) Wt+1=Wt−vt=Wt−(αvt−1+εgt)
α 、 ε \alpha、\varepsilon α、ε是超参数。 -
SGDM问题1:时刻t的主要下降方向是由累积动量决定的,自己的梯度方向说了也不算。
-
SGD/SGDM 问题2:会被困在一个局部最优点里
-
SGDM 问题3:如果梯度连续多次迭代都是一个方向,剃度一直增大,最后造成梯度爆炸
# sgd-momentun
beta = 0.9
m_w = beta * m_w + (1 - beta) * grads[0]
m_b = beta * m_b + (1 - beta) * grads[1]
w1.assign_sub(learning_rate * m_w)
b1.assign_sub(learning_rate * m_b)
1.4 SGD with Nesterov Acceleration
- SGDM:主要看当前梯度方向。计算当前loss对w梯度,再根据历史梯度计算一阶动量 m t m_{t} mt
- NAG:主要看动量累积之后的梯度方向。 计算参数在累积动量之后的更新值,并计算此时梯度,再将这个梯度带入计算一阶动量 m t m_{t} mt
- 主要差别在于是否先对w减去累积动量

思路如下图:

首先,按照原来的更新方向更新一步(棕色线),然后计算该新位置的梯度方向(红色线),然后
用这个梯度方向修正最终的更新方向(绿色线)。上图中描述了两步的更新示意图,其中蓝色线是标准momentum更新路径。
1.5 AdaGrad——累积全部梯度,自适应学习率
- SGD:对所有的参数使用统一的、固定的学习率
- AdaGrad:自适应学习率。对于频繁更新的参数,不希望被单个样本影响太大,我们给它们很小的学习率;对于偶尔出现的参数,希望能多得到一些信息,我们给它较大的学习率。
- 另一个解释是:初始时刻W离最优点远,学习率需要设置的大一些。随着学习你的进行,离最优点越近,学习率需要不断减小。
- 引入二阶动量——该维度上,所有梯度值的平方和(梯度按位相乘后求和),来度量参数更新频率,用以对学习率进行缩放。(频繁更新的参数、越到学习后期参数也被更新的越多,二阶动量都越大,学习率越小)
V t = ∑ τ = 1 t g τ 2 V_{t}=\sum_{\tau =1}^{t}g_{\tau }^{2} Vt=τ=1∑tgτ2
η t = l r ⋅ m t / V t = l r ⋅ g t / ∑ τ = 1 t g τ 2 \eta _{t}=lr\cdot m_{t}/\sqrt{V_{t}}=lr\cdot g_{t}/\sqrt{\sum_{\tau =1}^{t}g_{\tau }^{2}} ηt=lr⋅mt/Vt=lr⋅gt/τ=1∑tgτ2
W t + 1 = W t − η t W_{t+1}=W_{t}-\eta _{t} Wt+1=Wt−ηt

- 优点:AdaGrad 在稀疏数据场景下表现最好。因为对于频繁出现的参数,学习率衰减得快;对于稀疏的参数,学习率衰减得更慢。
- 缺点:在实际很多情况下,频繁更新的参数,学习率会很快减至 0 ,导致参数不再更新,训练过程提前结束。(二阶动量呈单调递增,累计从训练开始的梯度)
# adagrad
v_w += tf.square(grads[0])
v_b += tf.square(grads[1])
w1.assign_sub(learning_rate * grads[0] / tf.sqrt(v_w))
b1.assign_sub(learning_rate * grads[1] / tf.sqrt(v_b))
1.6 RMSProp——累积最近时刻梯度
- RMSProp算法的全称叫 Root Mean Square Prop。AdaGrad 的学习率衰减太过激进,考虑改变二阶动量的计算策略:不累计全部梯度,只关注过去某一窗口内的梯度。
- 指数移动平均值大约是过去一段时间的平均值,反映“局部的”参数信息,因此我们用这个方法来计算二阶累积动量:(分母会再加一个平滑项,防止为0)

对照SGDM的一阶动量公式:

# RMSProp
beta = 0.9
v_w = beta * v_w + (1 - beta) * tf.square(grads[0])
v_b = beta * v_b + (1 - beta) * tf.square(grads[1])
w1.assign_sub(learning_rate * grads[0] / tf.sqrt(v_w))
b1.assign_sub(learning_rate * grads[1] / tf.sqrt(v_b))
1.7 Adam
将SGDM一阶动量和RMSProp二阶动量结合起来,再修正偏差,就是Adam。
一阶动量和二阶动量都是按照指数移动平均值进行计算的。初始化 m 0 = 0 , V 0 = 0 m_{0}=0,V_{0}=0 m0=0,V0=0,在初期,迭
代得到的 m t 、 V t m_{t}、V_{t} mt、Vt会接近于0。我们可以通过偏差修正来解决这一问题:
m t ^ = m t 1 − β 1 t \widehat{m_{t}}=\frac{m_{t}}{1-\beta _{1}^{t}} mt =1−β1tmt
V t ^ = V t 1 − β 2 t \widehat{V_{t}}=\frac{V_{t}}{1-\beta _{2}^{t}} Vt =1−β2tVt
η t = l r ⋅ m t ^ / ( V t ^ + ε ) \eta _{t}=lr\cdot \widehat{m_{t}}/(\sqrt{\widehat{V_{t}}}+\varepsilon ) ηt=lr⋅mt /(Vt +ε)
W t + 1 = W t − η t W_{t+1}=W_{t}-\eta _{t} Wt+1=Wt−ηt
- 1 − β 1 t 、 1 − β 2 t {1-\beta _{1}^{t}}、1-\beta _{2}^{t} 1−β1t、1−β2t的取值范围为(0,1),可以将开始阶段 m t 、 V t m_{t}、V_{t} mt、Vt放大至 m t ^ 、 V t ^ \widehat{m_{t}}、\widehat{V_{t}} mt 、Vt 。
- 随着迭代次数t的增加, β 1 t 、 β 2 t \beta _{1}^{t}、\beta _{2}^{t} β1t、β2t趋近于0,放大倍数趋近于1,即不再放大 m t 、 V t m_{t}、V_{t} mt、Vt。
# adam
m_w = beta1 * m_w + (1 - beta1) * grads[0]
m_b = beta1 * m_b + (1 - beta1) * grads[1]
v_w = beta2 * v_w + (1 - beta2) * tf.square(grads[0])
v_b = beta2 * v_b + (1 - beta2) * tf.square(grads[1])
m_w_correction = m_w / (1 - tf.pow(beta1, int(global_step)))
m_b_correction = m_b / (1 - tf.pow(beta1, int(global_step)))
v_w_correction = v_w / (1 - tf.pow(beta2, int(global_step)))
v_b_correction = v_b / (1 - tf.pow(beta2, int(global_step)))
w1.assign_sub(learning_rate * m_w_correction / tf.sqrt(v_w_correction))
b1.assign_sub(learning_rate * m_b_correction / tf.sqrt(v_b_correction))
1.8 悬崖、鞍点问题
- 高维空间中,一个点各个方向导数为0,只要有一个方向对应的极值和其它方向不一样,该点就是鞍点。鞍点是一个不稳定的点,梯度轻微扰动就可以逃离。
- SGD梯度因为具有一定的随机性,反而可以逃离鞍点
- 例如n维空间中,某点各方向导数都为0。假设其中极大或者极小的概率为0.5,则该点为极大或极小值概率均为 0. 5 n 0.5^{n} 0.5n,反之为鞍点的概率为 1 − 2 ∗ 0. 5 n = 1 − 0. 5 n − 1 1-2*0.5^{n}=1-0.5^{n-1} 1−2∗0.5n=1−0.5n−1。高维空间中鞍点概率几乎为1。因此不必非要找到极小值,只需要loss降到比较低就行了。
- 梯度裁剪:悬崖部位loss会突然下降,梯度太大W容易走过头,所以可以梯度裁剪,限制梯度最大值。
二、过拟合解决方案
2.1 正则化
- 逻辑回归中,损失函数为 L o s s + λ ∣ W ∣ o r L o s s + λ ∥ W ∥ Loss+\lambda \left | W \right |or Loss+\lambda \left \| W \right \| Loss+λ∣W∣orLoss+λ∥W∥。在神经网络中则更加灵活。可以为不同层分别设置L1或者L2正则,且系数 λ \lambda λ也可以不同。即各层正则化项可以完全独立。
- L1正则可以对神经网络剪枝(很多权重趋近于0),网络运行速度可以大大加快。所以对实时要求高的场景可以用L1正则。
- 神经网络中可以设置前层的正则化项系数 λ \lambda λ更大,后层小一些。因为前层面对真实物理信号,噪声较大。为了过滤噪声,W应当较小, λ \lambda λ更大。且后层面对输出,正则化太厉害,影响分类效果。
2.2 dropout
- Dropout:每次训练时直接随机去除部分神经元。可以达到剪枝的目的,生成新的子网络。所以本质也是一种正则化,类比于L1正则。各层可以独立设置Dropout
- dropout相当于训练大量子网络,预测时使用全部神经元,等同于集成学习,增加泛化能力。
- 降低模型复杂度和各神经元之间的依赖程度,降低模型对某一特征的过度依赖,从而降低过拟合
- 子网络可以是海量的,大量子网络可能没有训练或者就训练一次,但是由于大部分神经元是一样的,少部分才被去除,所以大部分自网络高度相关。而且训练一个子网络,等于主网络大部分参数也得到了更新
- dropout是随机去除神经元,所以发生在 d k = W k ⋅ a k − 1 d^{k}=W^{k}\cdot a^{k-1} dk=Wk⋅ak−1加权求和的时候,而不是 a k − 1 = f ( d l − 1 + w 0 k − 1 ) a^{k-1}=f(d^{l-1}+w_{0}^{k-1}) ak−1=f(dl−1+w0k−1)激活之后。
- 训练时dropout概率为p,即只有(1-p)个神经元进行计算。则预测时结果要乘以(1-p)
- 跟正则化系数一样,dropout应该是前层设置的高。前层噪声多,需要过滤。后层主要用来精确拟合,dropout过高,影响预测结果。
- dropout可以取代正则,例如训练100个神经元,dropout=0.2;效果好于训练80个神经元。
2.3 Batch Normalization
神经网络学习隐含条件:输入数据有一定的规律,符合一定的概率分布,模型就是学习输入分布和类别之间的映射关系。但是神经网络中,各层输入分布并不稳定:
- SGD训练时,随机选取样本,造成分布的差异,即 μ / σ \mu /\sigma μ/σ都不一样
- 前层权重W的变化造成后层输入的变化,进而导致后层最优的参数W变化。即使后层参数已接近最优,也要重新学习,造成网络不稳定。后层分布累积了前层所有的W,所以不同轮次输入分布差异很大,学习速度会很慢
即训练样本数据本身是符合一定的概率分布的,但是因为以上两个原因,造成每个batch训练时概率分布差异很大。
对于一个batch的数据,第l层第m个神经元来说:
- 计算神经元在一个batch样本的输入 d i , m l d_{i,m}^{l} di,ml的均值和方差,将数据分布转为标准正态分布
μ m l = 1 b a t c h − s i z e ∑ i ϵ b a t c h d i , m l \mu _{m}^{l}=\frac{1}{batch-size}\sum_{i\epsilon batch }d_{i,m}^{l} μml=batch−size1iϵbatch∑di,ml - 通过两个待学习参数 β 1 , γ 1 \beta_{1} ,\gamma _{1} β1,γ1,将标准正态分布调整至 N ( β 1 , γ 1 ) N(\beta_{1} ,\gamma _{1}) N(β1,γ1)。
BN的作用:
- 使输入数据对应的概率分布保持不变(不是数值不变)。无论训练集数据如何选择,前层网络参数如何变化,各层接受的输入分布在不同的训练阶段都是一致的,各层最优参数稳定,提高了收敛速度
- 不容易受极端数据影响,所以可以提高学习率,使收敛速度进一步提高。
- 降低对参数初始化的依赖程度
- 对参数进行正则化,提高了模型泛化能力
其它注意点:
- batch_size不宜过低,否则均值方差估计不准
- 预测时没有批量的概念,都是对单个样本进行预测,无法进行BN操作计算 μ / σ \mu /\sigma μ/σ 。所以要保存训练中计算的 μ / σ \mu /\sigma μ/σ ,预测时使用它们进行无偏估计(公式中t表示当前迭代次数,T为总迭代次数)
μ = 1 T ∑ t = 1 T μ t \mu =\frac{1}{T}\sum_{t=1}^{T}\mu_{t} μ=T1t=1∑Tμt
σ = 1 T − 1 ∑ t = 1 T σ t 2 \sigma =\sqrt{\frac{1}{T-1}\sum_{t=1}^{T}\sigma _{t}^{2} } σ=T−11t=1∑Tσt2 - BN的位置在激活函数之前。因为将输入转换为正态分布 N ( β 1 , γ 1 ) N(\beta_{1} ,\gamma _{1}) N(β1,γ1)的前提是输入数据本身符合正态分布。而神经网络中激活函数的值域往往有限,造成激活后的输出不会符合正态分布。这样BN之后也不会符合正态分布。
2.4 Layer Normalization
- Batch Normalization:在某一个神经元,所有batch个样本上进行归一化,即归一化不同样本的同一特征
- Layer Normalization:对某一个样本,同一层全部神经元上进行归一化,即归一化一个样本所有特征
- BN和LN都可以用的时候BN一般更好,因为不同数据,同一特征得到的归一化结果更不容易造成信息损失。LN会造成神经元耦合。
- batch_size过小的场合,或者RNN、LSTM、Attention等变长神经网络一般使用LN。(变长神经网络虽然填充到同一长度,但是pad部分是没有意义的,进行特征维度归一化也没用实际意义。NLP任务中一个序列的所有token都是同一语义空间,进行LN归一化有实际意义)
对于l层第i个样本有:(l层共有m=1、2、… M l M^{l} Ml个神经元)
μ i l = 1 M l ∑ m = 1 M l d i , m l \mu _{i}^{l}=\frac{1}{M^{l}}\sum_{m=1 }^{M^{l}}d_{i,m}^{l} μil=Ml1m=1∑Mldi,ml
计算出 μ / σ \mu /\sigma μ/σ后,和BN一样将数据归一化为 N ( β 1 , γ 1 ) N(\beta_{1} ,\gamma _{1}) N(β1,γ1)分布。
综合之前的讲解:
model.train()的作用是启用 Batch Normalization 和 Dropout。model.eval()的作用是不启用 Batch Normalization 和 Dropout。